Предлагается -устройство для управления на расстоянии двигателем двойного питания. Одна из обмоток последнего питается через фазорегулятор, в качестве которого взят трехфазный индукционный регулятор.
Управляемый двигатель может иметь качательное или вращательное движение в зависимости от выбора параметров регулятора.
На чертеже фиг. 1 изображает принципиальную схему предлагаемого устройства; фиг. 2 и 3 - соответствующие диаграммы напряжений.
Применяемый в устройстве трехфазный индукционный регулятор снабжен двумя электрически соединенными между собой обмотками.
Одна обмотка 3 (первичная статора или ротора) соединяется звездой или треугольником и приключается к сети 7 переменного тока, а другая обмотка 2 (вторичная статора или ротора) выполняется открытой и присоединяется с одной стороны к сети /, а с другой стороны-к сети б. Обмотки же управляемого на расстоянии двигателя двойного питания 4 присоединяются одна к сети 1, а другая - к сети б таким образом, чтобы их магнитные поля вращались в одном направлении.
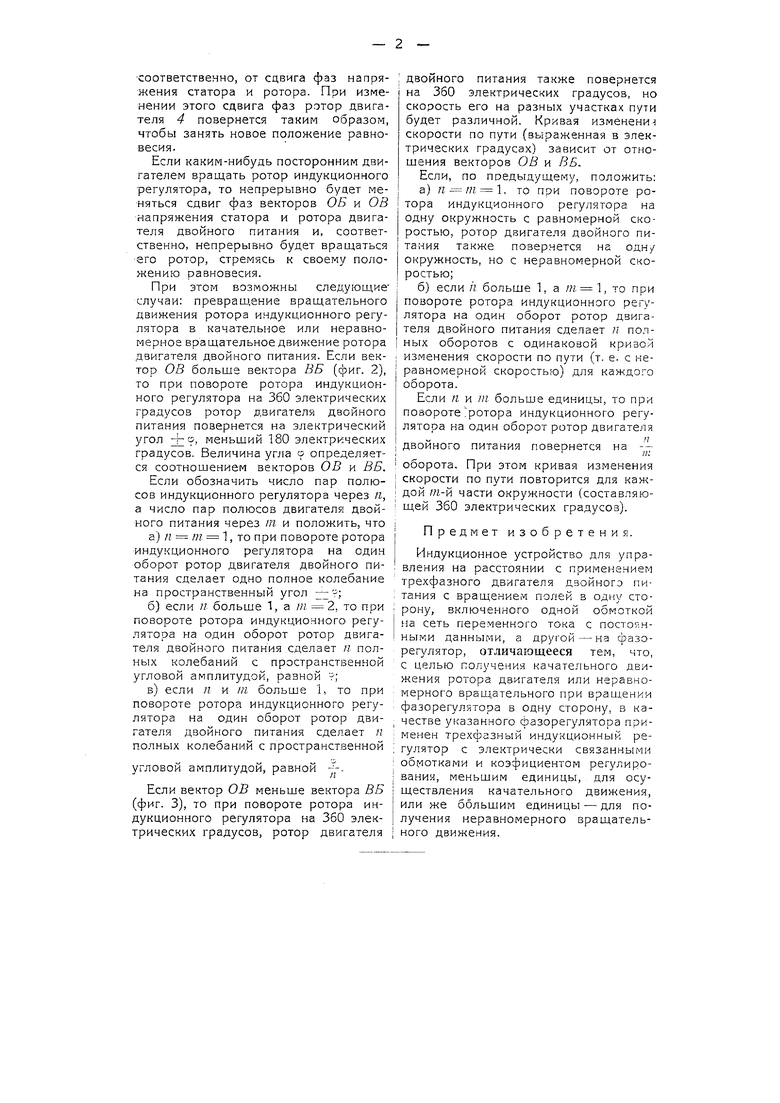
Напряжение в сети 6 (вектор ОВ на фиг. 2 и 3) складывается из напряжения сети / и вторичного напряжения, индуктируемого в обмотке 2 магнитным потоком обмотки 3 (вектор ВБ на фиг. 2 и 3), и графически изображается вектором ОБ (фиг. 2 и 3).
Напряжение, индуктируемое в обмотке 2-ВБ, оставаясь постоянным по величине, меняет свой сдвиг фаз по отношению к напряжению сети /-ОВ в зависимости от пространственного положения ротора относительно статора. Если повернуть ротор индукционного регулятора на 360 электрических градусов, то вектор ОБ повернется по отношению к вектору ОВ на 360. Вектрр напряжения сети 6 будет также меняться по величине и направлению. Обмотки ротора и статора двигателя двойного питания, как выше указано, присоединяются к сетям 7 и б таким образом, чтобы их магнитные поля вращались в одном направлении. При этом ротор двигателя двойного питания остается неподвижным относительно статора, занимая по отношению к нему определенное положение равновесия, зависящее от сдвига фаз токов статора и ротора и (приданном сопротивлении обмоток).
соответственно, от сдвига фаз напряжения статора и ротора. При изменении этого сдвига фаз ротор двигателя 4 повернется таким образом, чтобы занять новое положение равновесия.
Если каким-нибудь посторонним двигателем вращать ротор индукционного регулятора, то непрерывно будет меняться сдвиг фаз векторов ОБ и ОВ напряжения статора и ротора двигателя двойного питания и, соответственно, непрерывно будет вращаться его ротор, стремясь к своему положению равновесия.
При этом возможны следующие случаи: превращение вращательного движения ротора индукционного регулятора в качательное или неравномерное вращательное движение ротора двигателя двойного питания. Если вектор ОВ больще вектора ВБ (фиг. 2), то при повороте ротора индукционного регулятора на 360 электрических градусов ротор двигателя двойного питания повернется на электрический угол + с меньщий 180 электрических градусов. Величина угла tp определяется соотношением векторов ОВ и ВБ.
Если обозначить число пар полюсов индукционного регулятора через я, а число пар полюсов двигателя двойного питания через т и положить, что
а)п т 1, то при повороте ротора индукционного регулятора на один оборот ротор двигателя двойного питания сделает одно полное колебание на пространственный угол ::i г;
б)если 7 больше 1, а m 2, то при повороте ротора индукционного регулятора на один оборот ротор двигателя двойного питания сделает // полных колебаний с пространственной угловой амплитудой, равной ;
в)если п и т больше 1, то при повороте ротора индукционного регулятора на один оборот ротор двигателя двойного питания сделает п полных колебаний с пространственной
угловой амплитудой, равной ..
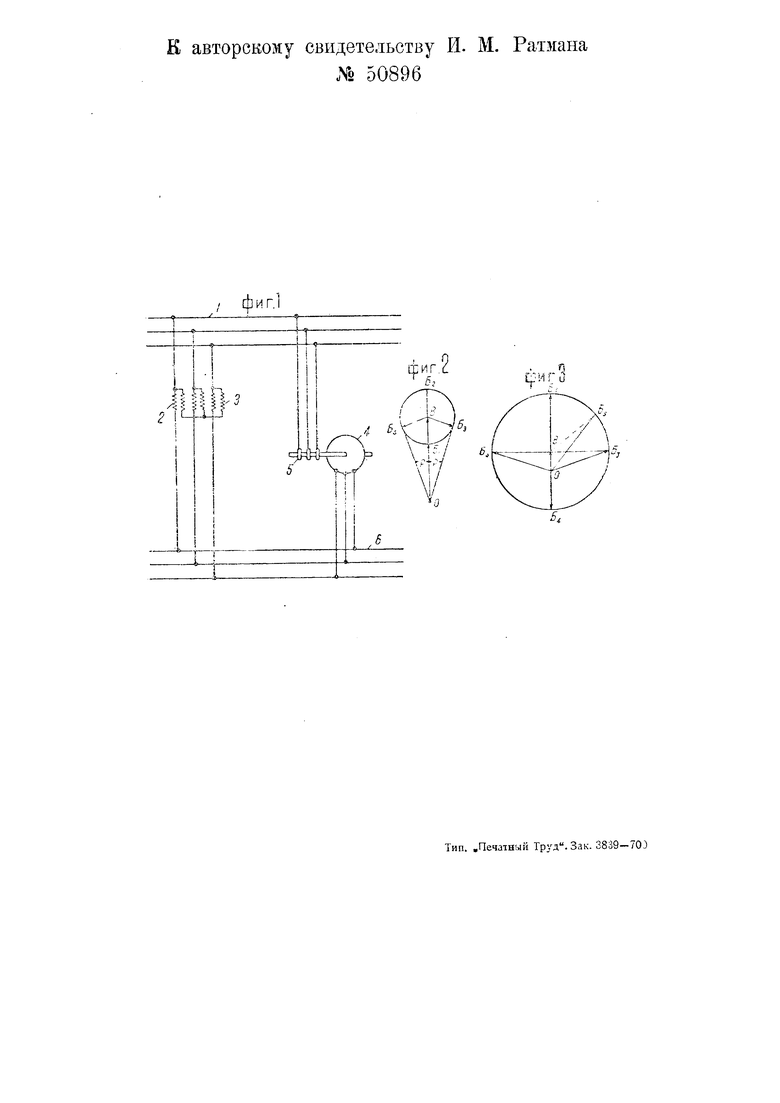
Если вектор ОВ меньше вектора ВБ (фиг. 3), то при повороте ротора индукционного регулятора на 360 электрических градусов, ротор двигателя
двойного питания также повернется на 360 электрических градусов, но скорость его на разных участках пути будет различной. Кривая измeнeни скорости по пути (выраженная в электрических градусах) зависит от отношения векторов ОВ и ВБ.
Если, по предыдущему, положить:
а) 1. то при повороте ротора индукционного регулятора на одну окружность с равномерной скоростью, ротор двигателя двойного питания также повернется на одн/ окружность, но с неравномерной скоростью;
б)если п больше 1, а т 1, то при повороте ротора индукционного регулятора на один оборот ротор двигателя двойного питания сделает п полных оборотов с одинаковой кривой изменения скорости по пути (т. е. с неравномерной скоростью) для каждого оборота.
Если п и т больше единицы, то при поворотеротора индукционного регулятора на один оборот ротор двигателя
двойного питания повернется на -оборота. При этом кривая изменения скорости по пути повторится для каждои части окружности (составляющей 360 электрических градусов).
Предмет изобретения.
Индукционное устройство для управления на расстоянии с применением трехфазного двигателя двойного питания с вращением полей в одну сторону, включенного одной обмоткой .ча сеть переменного тока с постоянными данными, а другой - на фазорегулятор, отличающееся тем, что, с целью получения качательного движения ротора двигателя или неравномерного вращательного при вращении фазорегулятора в одну сторону, в качестве указанного фазорегулятора применен трехфазный индукционный регулятор с электрически связанными обмотками и коэфициентом регулирования, меньшим единицы, для осуществления качательного движения, или же ббльщим единицы - для получения неравномерного вращательного движения.
к авторскому свидетельству И. М, Ратзшна
Хо 50896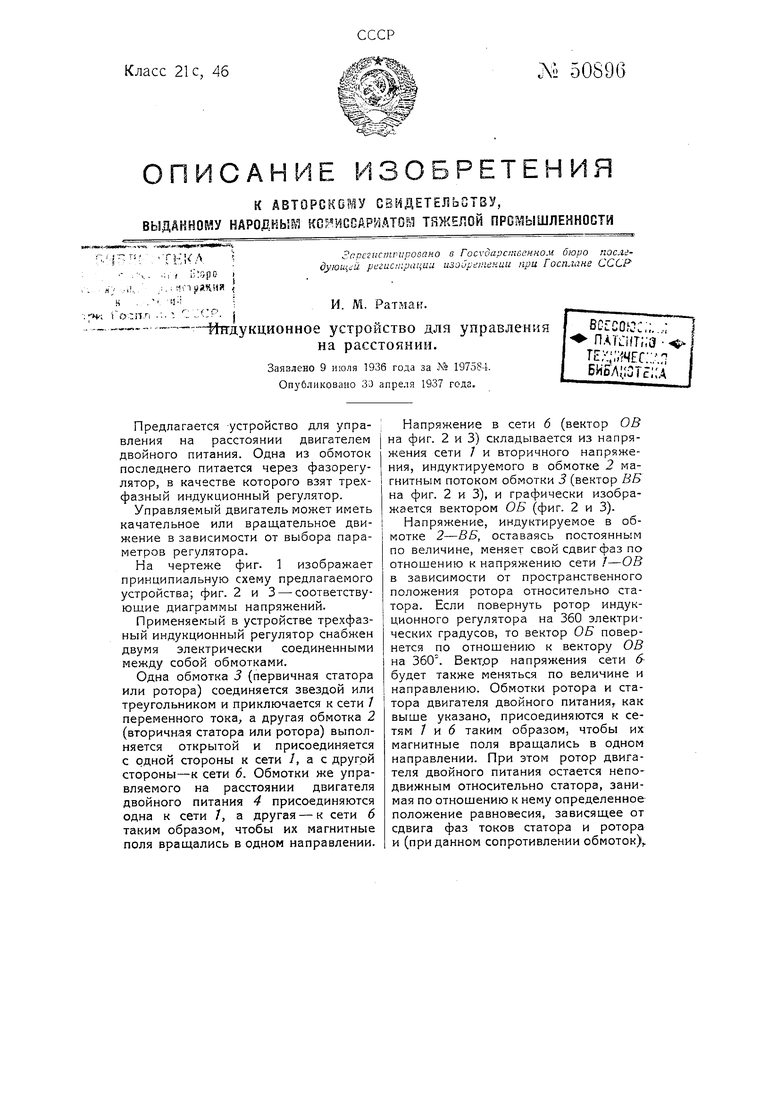
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поддержания постоянства скорости двигателей постоянного тока | 1936 |
|
SU54927A1 |
| Реле времени | 1936 |
|
SU51481A1 |
| Устройство для торможения асинхронного двигателя противотоком | 1936 |
|
SU50934A1 |
| Устройство для синхронизации вращения многофазных коллекторных двигателей типа Шраге | 1938 |
|
SU56027A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НЕРАВНОМЕРНОСТИ ХОДА ВРАЩАЮЩЕГОСЯ ВАЛА | 1936 |
|
SU52314A1 |
| Бесконтактный сельсин и фазорегулятор | 1939 |
|
SU56183A1 |
| Реле скорости | 1938 |
|
SU55496A1 |
| Устройство для автоматического выключения электрического двигателя | 1939 |
|
SU59259A1 |
| Реле скорости | 1935 |
|
SU47738A1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2005 |
|
RU2288535C1 |
/ ф и г. i
Ь р L
3
