., - : . - : .: ,
Изобретение отнсх:ится к сел.ьскохсхзЯйственнЫ л машинам, в частности к/рабочим ор-; ганам ягодоуборочных машин вибрационнсго
типа.
Известны рабочие органы ягодоуборочных 5 машин, включающие симметрично размещенные
относительно оси машины вертикальные роторы с поярусно закрепленными на их поверх.-, ности пальцами и привод к ним.10
Основными недостатками таких рабочих органов являются значительные повреждения кустов, особенно шпалерных насаждений винсграда, повреждение глазкш (почек) на плодоносных ветвях и лозах, отрыв побегов, ПОВ-. 15 реждение луба на рукавах и штамбах куста, раэдввливание ягод.
В предпагаемом рабочем органе ягодоубоирочной машины , сопелью снинсения псжреждений 20 йгоя и ветвей хуСта, пальшы роТоров имеют сер.повидную форму и в каждом ярусе ротора совме стно образуют кольцевой контур, при этом каждый из пальцев может быть выполнен наборным из жестких втулок, армированных по оси нап-
ряженным тросом и покрытых снаружи эластичным материалом.
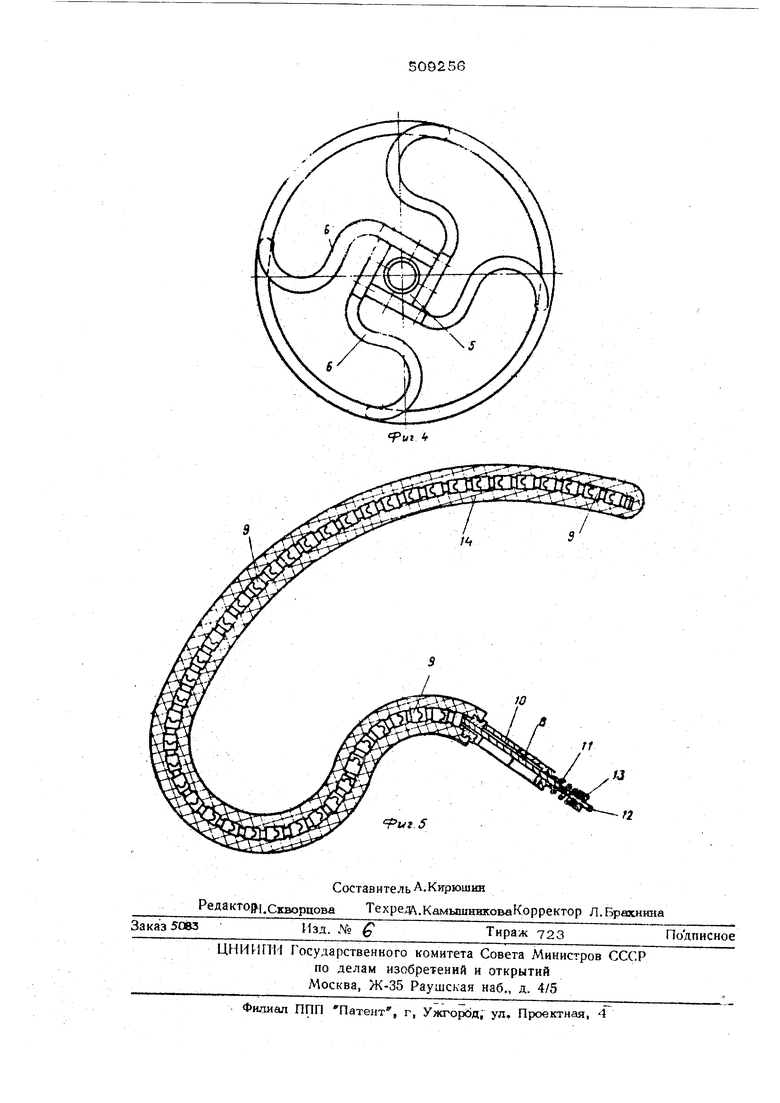
На. фиг. 1 показан рабочий орган в работе, .общий вид; на фиг. 2 - то же, вид сверку; на фиг, 3 - то же, вид сбоку; на фнг, 4 элемент ротора, вид сверху; на фиг. 5 - серповидный палец, продольный разрез. Рабочий орган ягодоуборочнрй машины сосч тоит из. симметрично размешенных относитешгно оси машины 1 вертикальных роторов 2, каждый из которых включает вертикалыштй вал 3, шарнирно закрепленный с помошью подшипников в горизонтальньтх тягах 4. На вертика,- -ном валу 3 на равном рассто-чии одна от другой установлены скользящие втулки 5, в которых закреплены упругие серповидные пальцы 6 и которые в каждом ярусе ротора 2 совместно образуют кольцевой контур. Скользящие втулки 5 устанавливаются на ва.г1у 3 с помошью неподвижных длинных втулок 7, которые.крепятся к валу стопорными болтами, что обеспечивает свободу вращения ск ользящим втулкам 5.
В скользящей втулке S выполнены отверстия квадратной формы .для монтажа серпо--. виднгого пальца 6, где он крепится с помощь | Трйорных болтов. На кажрую скользящунэГ втулку 5 устаиавливаегея четыре серповидйых пальца 6, образуют диск ротора 2. Д|Ш вавода концов серповидных пальдав 6 квадратные отверстия в скользящей втулке 5 повернуты на угол к плоскости круга. Каждый упругий серповидный палец 6 состоит из напряженного троса 8, набора; втулок 9( замка 10 квадратной формы для натяжения TJioca 8, пружины 11 и шпильки 12 с гайкой 13, позволяющих дополнительн натягивать трос 8. Торцы втулок 9 выполг. нены с одной стороны под прямым углом, а с другой - под острым к продольной оси, кр ме того, с одаой стороны у каждой из них имеется паз, а с другой - выступ, выполнен ные по радиусу, В зависнем ости от выбранных тор цов втулок 9 набирается форма серпсеидног пальца 6 с заданной упрут остью. Сверху тул ки 9 армируются эластичным материалом 14, например, peaaiioit. Горизонтальные тяги 4 с вертикальными роторами 2 жестко закрепляются на вертикальных штангах 15, которые шарнирно крепятся в опорной раме 16 машины 1, На опорной раме 16, кроме тег о. Крепятся транспортер 17, улавливатели 18 и силовой привод .1 9, В верхней части ойорной рамы 16 на вертикальной штанг 15 параллельно ей на вторых горизонтальных 20 жестко закреплен вал 21, пр водящий в Колебательное движение вертикал ,г п ч -о, ную штангу 15. Ве,тикальиый вал 21 приво дится В движение с помощью силового привода 19, совершаюшего лозвратно-поступательное движение. Кроме этого, один вертикальный вал 21 шарнирно соединен с другим вертикальным валом 21 посредством горизонтальной тяги 22, обеспечивая передачу движения на второй соседний ротор 2; роторы вместе образуют одну секцию рабочего органа. Для передачи движения на вторую секцию рабочего органа предусмотрен параллел граммный механизм, состоящий из двух тяг 23, жестко закрепленных на вертикальных штангах 15 со стороны силового привода 19, и рЫчага 24, шарнирно соединенного с тягами 23. Передача движения на второй ротор 2 второй секции рабочего -органа осуществляет ся с помощью второй горизонтальной тяги 22, шарнирно соединенной с вертикальными валами 3. При помощи гидроиилинщэсе 25 осуществ.шется развод первой и второй секции, что обеспечивает беспрепятственный въезд и ьыезд из ряда. Рабочий орган ягодоуборочной машины работает следующим образом. Силовой привод 19 подключают к двигательной устансжке машины 1. Рабочий ор ган настраивают на определенную амплитуду и частоту воздействий на шпалерные насаждения в зависимости от сорта и вида убираемого урожая ягод. После .настройки машина 1 с рабочим органом въезжает в междурядья, например, винсградника, седлая ряд. Включаются гидроцилиндры 25, обес « печиваюшие сжатие кустов при помощи упру- гих роторов 2, затем гидроцилиндры запираются на гидропанели. Первый ротор 2 первой секции смещен относительно второго pOTJpa 2 на высоту, равную полсеине расстояния между дисками первого ротора 2, Вторая секция выпачнена аналогично, что обеспечивает равномерное воздействие на куст. Включается силсжой привод 19, например, возвратно-поступательный гидромотор, который приводит в колебательное движение секции рабоче- го органа. Колебания на вторую секцию передаются через параллелш рамм и обеспечивается синхронность колебаний обоих секций в противофазе на 18О°. Благодаря тому, что упругие серповидные пальцы 6 собраны кругами и закреплены в скользящей втулке 5 на валу 3 ротора 2, обеспечиваются ди(|. ференциальные колебания кустов по высоте, при этом сохраняется нулевая скорость отно, сительно движения рабочего органа к кустам при движении всего агрегата по междурядью. СГг С Пт « ПОД действием рабочего о,ганы,подаются на улавливатрл i я НИХ-НЯ , ч них-на транспортеры 17, которые выносят собранный урожай и концентрируют его в собранный урожай и концентрируют бункер или - .-- в ящики, при этом плодоносные ....i ML/f7 ЛОЗЫ, глазки, луб На лозах и шпалерные спО ры не пшреждаются. При встрече рабочего органа со шпалерным толбом пальцы 6 ротора 2 дефорируются и обкатываются с нулевой скоросью относительно движения, что не требует пециальной следящей системы, Ф о р м у Л а изобретения Рабочий орган ягодоуборочной машины, ключающий симметрично размещенные отг осительно оси машины вертикальные роторы поярусно закрепленными пальцами и привод ним, отличающийся тем, что, с елью снижения пох реждений ягод и ветвей уста, па:1ьцъ ротороп им.;ют серповидную орму и в каждом sjpyce ротора совместно обазуют кольцевой контур, причем кажяый палец ыполнен набор1гым из жестких втулок, арми- сжанных по оси н-апряженным трасом и порытых снаружи эластичным M.TIсериалом. 7/ OAy//c /; . m . ut.1

| название | год | авторы | номер документа |
|---|---|---|---|
| Встряхиватель виноградоуборочной машины | 1989 |
|
SU1662407A1 |
| Устройство для сплошной подрезки шпалерных насаждений | 1982 |
|
SU1020070A1 |
| МАШИНА ДЛЯ КОНТУРНОЙ ЧЕКАНКИ ПОБЕГОВ ВИНОГРАДНОЙ ЛОЗЫ | 2024 |
|
RU2839884C1 |
| Улавливающее устройство ягодоуборочной машины | 1983 |
|
SU1158082A1 |
| Виноградоуборочная машина | 1980 |
|
SU1037871A1 |
| Обрезчик виноградных кустов | 1985 |
|
SU1268131A1 |
| Устройство для отделения лозы от шпалерной проволоки | 1972 |
|
SU437505A1 |
| Улавливающее устройство ягодоуборочной машины | 1980 |
|
SU884611A1 |
| Устройство для удаления предварительно подрезаемой лозы со шпалерной проволоки | 1978 |
|
SU854320A1 |
| Рабочий орган ягодоуборочной машины | 1986 |
|
SU1336980A1 |