1
Изобретение 1касается .металлорежуи их станков, а имение одношпиндельных автоматических токарио-револБверных станков для обработки штуч«ых изделий.
Известны загрузочные устройства к токарно-револьвернЫМ автоматам, устанавливаемые на станину со стороны переднего «конца шнипделя и включающие :в себя магазин с лотко-м, с 1ру|кой-пвре 1оочиком с горизонтальной осью (Качения, привод к. -ней, выполненный в виде зубчатого колеса -и рей-ки, управляемой от распределительного вала автомата, толкатель, отсекател И для поштучной выдачи деталей и механизм зажима детали в виде подпружиненного рычага, прижимающего заготовку боковой цилиндрической поверхностью к Т1риз1ме руки-переносчмка.
Однако в этих устройствах невоз можно нспользо вать для подачи такие заготовки, а онфИГурация которых требует применения специальных цанг с на-клонным базирующим отвер1стием.
Целью изобретения является обеспечение кадежпости базирования та1ких заготовок при подаче в специальную цангу.
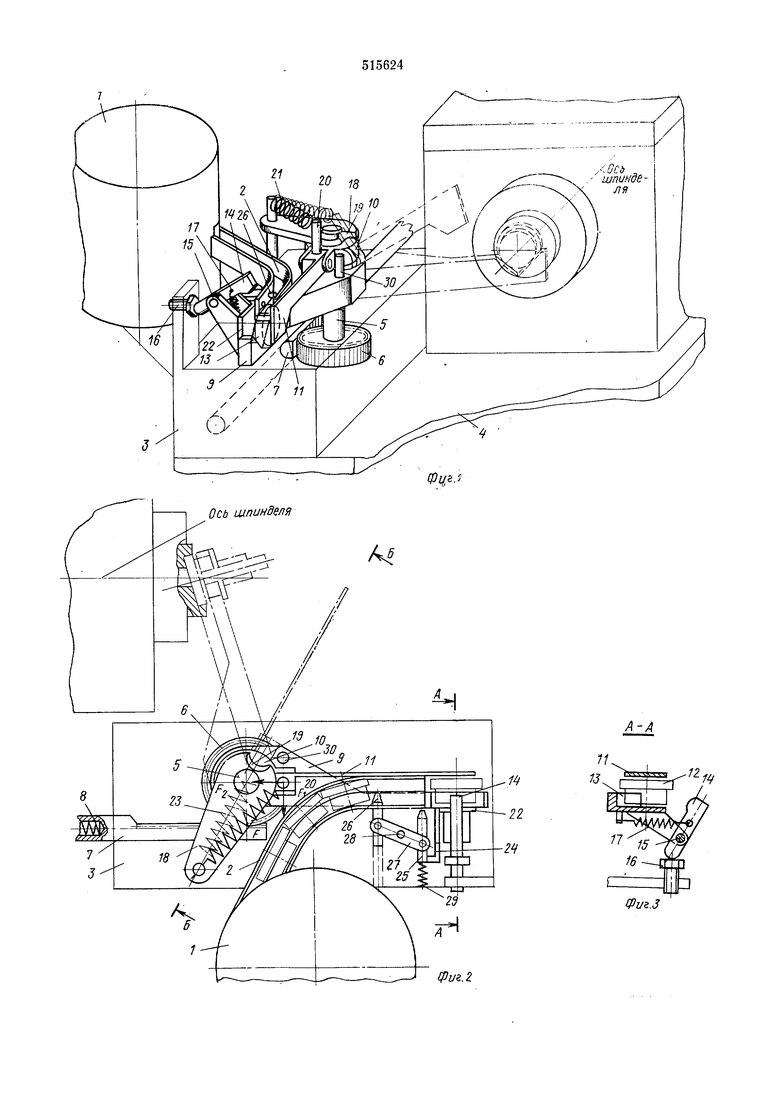
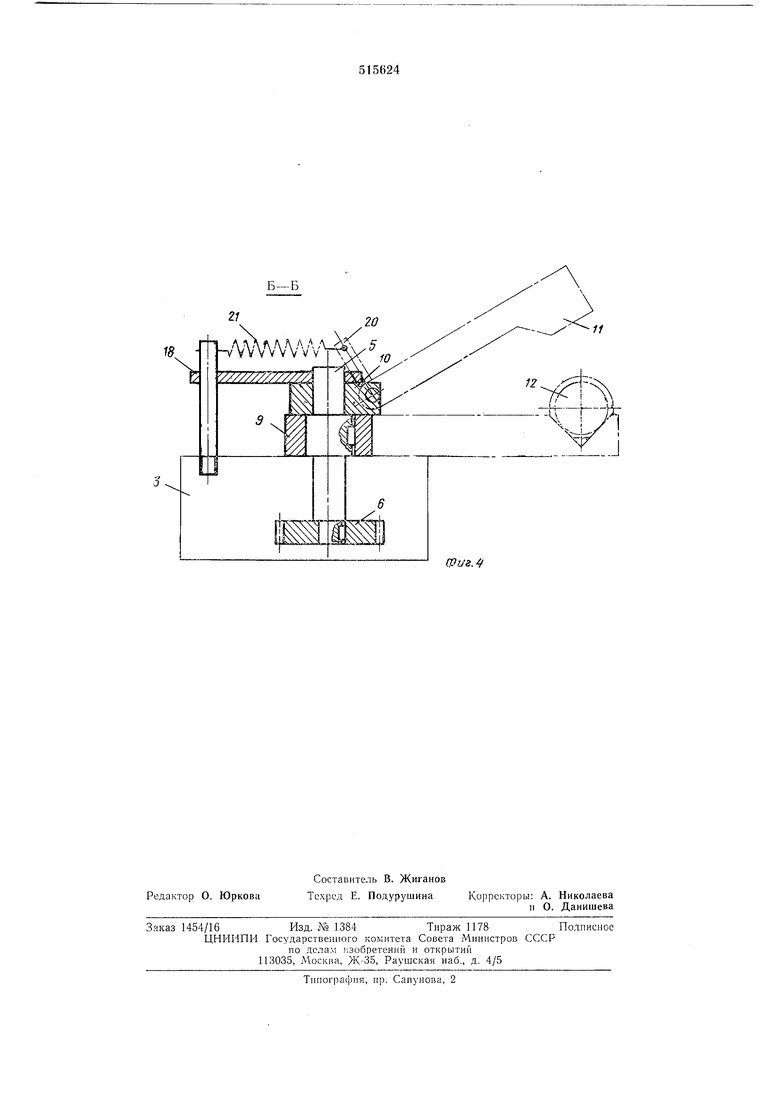
Это достигается тем, что ось руки-переносчика установлена в корпусе вертикально и центр ее -расположен в плоскости, совпадающей с базовой поверхностью цанги щиинделя, и на оси дополнительно установлены поворотная втулка с планкой и механизм подъема и возврата упомянутой планки, выиолнснный в виде иеподвижного кулачка с лункой, пальца, жестко связанного с планкой, постоянно прпжатого к кулач ку пружиной, и упора, установленного на руке-переносчике н взаимодействующего с поворотной втулкой при обратном ходе руки-переносчш-са. На фиг. 1 показано предлагаемое устройство; на фиг. 2 - то же, вид в плане; на фиг. 3- разрез по А-А на фиг. 2; на фиг. 4-разрез по Б-Б на фцг. 2.
Загрузочное }стройство к токарцо-рево.1ьверному станку содержит магазин 1 с лотко-м
2 и корпус 3, закрепленные на ставшие 4. На вертикальной оси 5, установленной в корпусе, р.чсположены зубчатое колесо 6, зацепляющееся с 7, снабженной нредохраинтельной пружиной 8 и управляемой кулачками расиределительного вала автомата (не показан), рука-переносчнк 9, поворотная втулка 10 с планкой 11 для поддержания загружаемой из лотка детали 12 и призма 13 руки-иереносчика. Для зажима детали за боковую цилиндр:1ческую поверхность имеется мсха:п1зм, состояпшй из рычага 14с осью качания 15, упора 16 и пружины 17. Механизм подъема н возврата планки 11 установлен на вертикальной оси 5 II в виде неподвижного кулачка 18 С луНКО
9, пальца 20, который жестко связан с иланкон 11 и постоянно Прижат к жулачку пружиной 21. В исходном положении планки, когда рука-нереиосчик неподвижна, пружина 21 расположена так, ЧТО одпа составляющая силы F сила F направлена на детали к стенке 22 рукн-переносчвка, а другая составляющая - на прижнм пальца 20 к кулачку 18. В конечном положении илалки, когда планка поднята, так как палец 20 запал в луику 19, ось 23 пружины находится в плоскости планки и составляющая F равна нулю, а составляющая FZ - максимальному значению, равному F (юм. фиг. 2).
Рука-переносчик 9 воздействует на толкатель 24, связанный ic отсекателями 25 и 26, соединен ными между собой рычагом 27 с осью 28. Отсекатель 25 связан с пружиной 29.
Загрузочное устройство работает -следующим образом.
Заготовки 12 загружаются в спиральный магазин 1 и под действием своего веса скатываются IB лотоа 2, из iKOTOporo попадают в призму 13 руки-переносчика 9 между планкой 11 и упорной стенкой 22. Под действием кулачка вращающегося распределительного вала токарно-револьверного автомата перемещается зубчатая рей-ка 7 и вращает зубчатое колесо 6, а имеете с ним вертикальную ось 5 и руку-переносчик 9 в папра-влении к щпинделю стайка. При этом заготовка упирается в подпружиненную планку 11 и под ее воздействием прижимается к упорной стенке 22. GBOбодно насаженная «а ось 5 поворотная втулка 10 с планкой 11 и палец 20 также начинают перемещаться к шпинделю, толкаемые рукойпереносчиком через заготовку. При дальнейатем движении рычаг 14 отходит от упора 16 и под действием пружины 17 надежно зажимает заготовку в призме 13. Далее палец 20 западает в лунку 19 неподвижного кулачка 18 и под действием пружины 21 поднимает планку 11. Последняя останавливается, а рукапереносчик проходит под ней и загружает заГОТОВ1КУ в специальную цангу, надежно прижимая ее В базовой поверхности. Ось цанги расположена под углом к оси щпинделя, что обусловлено дальнейшей обработкой заготовки. Это вызывает необходимость установить вертикальную ось с рукой-переносчиком таким образом, что ее центр лежит ;в плоскости, совпадающей с базовой поверхностью цанги, которая расположена не нерпендикулярно к оси шнинделя, а под онределенным углом. После того как заготовка подана, цанга зажимает ее, и рука-переносчик возвращается в исходное положение. При этом упор 30, закрепленный на руке-переносчике, воз|ДеЙ1ствует на поворотную втулку 10, 1вывод1ит палец 20 из лунки кулачка 18 и опускает планку И. Втулка 10 под действием пружины 21 прижимается к лотку 2, обеспечивая необходимый зазор .между планкой 1 и упо-рной стенкой 22 для свободного западания в призму 13 очередной заготовки. Рычаг 14 набегает на «еподвижный упор 16 и поднимается, растягивая пружины 17 и обеспечивая возможность загрузки следующей заготовки в призму руки-переносчика, воздействующей на толкатель 24, который, в свою очередь утапливает отсекатель 26, пропускающий одну очередную заготовку, и выводит отсекатель 26, удерживающий в лотке весь столб заготово1к.
Формула изобретения
Загрузочное устройство к токарно-револьверному автомату, выполненное в виде закрепленных на станине магазина с лотком, поворотной руки-переносчика, механизма зажима детали и отсекателей, отличающееся тем, что, с целью обеспечения надежного -базирования заготовки при загрузке ее в цангу под углом к оси шпинделя, на оси руки-переносчика установлены поворотная втулка с планкой и механизм подъема и возврата упомянутой планки, выполненный в виде неподвижного кулачка с поджаты-м к нему пальцем, закрепленным на планке, и поводка, установленного на руке-переносчике и взаимодействующего с поворотной втулкой при обратном ходе руки-пе,реносчика.
Б-Б
Фиг, 
| название | год | авторы | номер документа |
|---|---|---|---|
| Токарно-револьверный автомат | 1974 |
|
SU663487A1 |
| ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО | 1997 |
|
RU2138368C1 |
| Загрузочное устройство | 1976 |
|
SU662317A1 |
| Токарный автомат | 1986 |
|
SU1355360A1 |
| Токарно-револьверный автомат | 1979 |
|
SU882703A1 |
| Устройство для ориентированной подачи деталей в токарно-револьверные станки | 1985 |
|
SU1296363A1 |
| Устройство для отделения заготовки от стопы и подачи ее в зону обработки | 1982 |
|
SU1123780A1 |
| Загрузочное устройство | 1983 |
|
SU1144846A2 |
| МЕТАЛЛООБРАБАТЫВАЮЩИЙ СТАНОК (ВАРИАНТЫ) | 2006 |
|
RU2401721C2 |
| Загрузочное устройство | 1972 |
|
SU443740A1 |