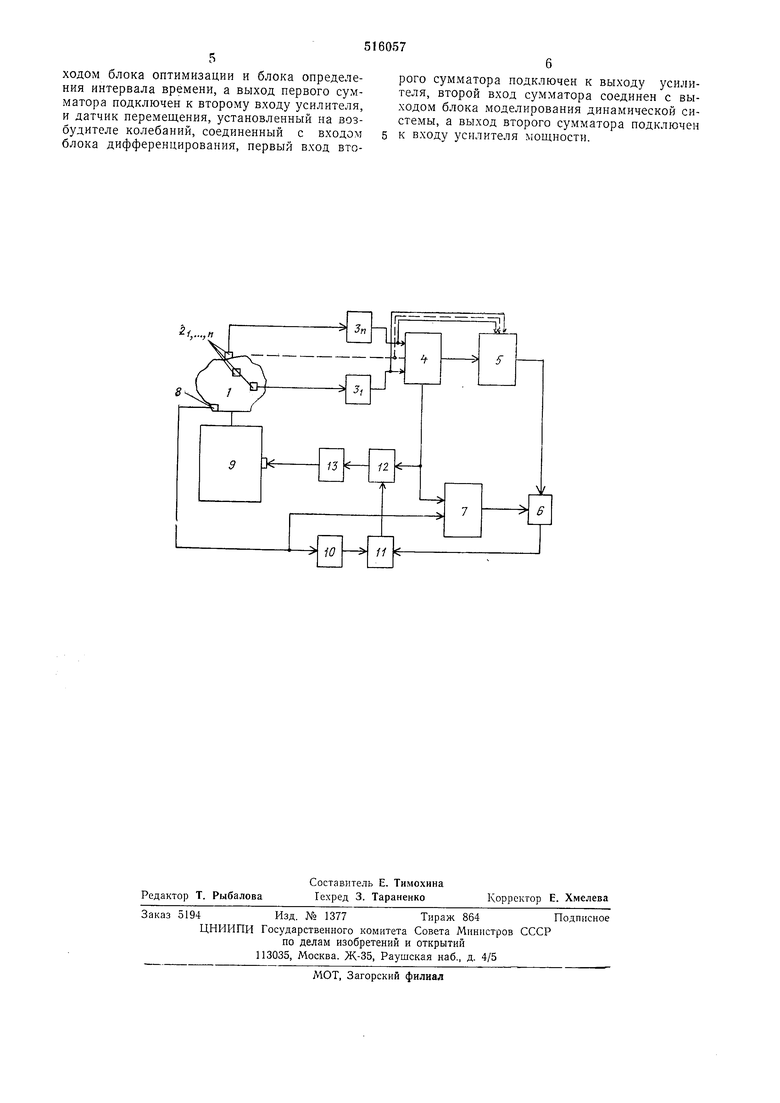
ход блока 4 подключен и к второму входу блока вычисления интервала временн. Выход сумматора 12 соединен с входом усилителя мощности 13, выход которого подключен к управляющему входу возбудителя колебаний 9.
Устройство работает следующим образом.
Исследуемый об1;скт 1, иредставляюнхий шеть системы с неизвестной структурой, соверщает колебания, задаваемые столом возбудителя колебаний 9. Датчики 1,. . ., 2; ,. . ., 2„ фиксирует параметры исследуемого объекта I в разных местах. Они усиливаются усилителями 3, . . ., 3t , .. ., 3„ , с выходов которых сигналы, проиорциональные параметрам исследуемого объекта, постуиают в блок моделирования 4 известной частн системы. Блок моделирования динамической системы 4 позволяет легко изменять параметры моделируемой частн системы и оиределять при этом иужный закон изменения параметров объекта 1. Этот закон вырабатывается известными методами б;1оком м;)делирования 4, динамической системы и с выхода блока 4 через сумматор 12 н уси.титель 13 подается на воябуди1ЧЛь колебаний 9.
В звене преобразования между электрическим сигиалом с выхода блока 4 и движением стола возбудителя У„ суи1,ествует COOTHOHI-;пне
/А-т У(1т),
где т - время задержки в этой непи.
В звеньях преобразования истинных иараметров объекта 1 для электрических сигналов, выдаваемых датчиком через усилители 3 и 1 оступаюии-1х в блок 4, существует cooTi-onieние
где т/ - время задержки для отдельной пени датчика.
В и ограммиое устройетво 5 по за|)анее извест1 ым амилитудно-частотиым и ({зазо-часто ным харшстериетпкам каждого канала датчика и по сигналам с входов уси.1ителей 3 и блока моделироваиия 4, носяии1м ииформанию о характеристике нронесса моделиров., взодятся стандартные ирограммы. Г1рилго1 ля теорию коэффициентов влияния, нр.ограммь. соетавлеиы таки. образом, чтобы на В,1ходе уст юйетна 5 ио чучить сигнал, n o:bJpiuio;:;Mbный опт;1Л1альному и ггервалу времени, учпгы ;аюи|,:й заиаз;ывания каналов датчиков н его влняние па вьгходную велнчину блока моделирова1;ия 4, унравляюииш возбудитс;1ем 9.
Сигнал с выхода датчика 8 ерем:,мдеин.ч стола |;озб дителя колебаний костуиает мя один вход блока оиределении И1ггервала ispeмени, на второй вход которого иосгучпет выходной ещпсл блока 4. В Gioixj 7 cp,,.xiiiваются эти сигна.ты н известным методом изЛ1ерек11я зш.аздываиия между сигналами иычнсля от его. Снгна.ч с выхода б, 7 ЯБЛЧогся 1)о; 0ри1оиальиым запаздывания в звене нрсобразоваиия электрнчеекого
сигиала с выхода блока 4 движением стола возбудителя 9.
Сумматор 6 суммирует сигналы с выходов блоков 7 и 5 и на выходе его получается сигнал, нропорциоиальный времени задержки во всем контуре нолунатурного моделирования. Этот сигнал иостуиает на регулирующий вход усилителя И. На другой вход усилителя 11 поступает сигнал с выхода блока дифференцирования, нронорциоиальиый скорости перемещения етола возбудителя, так как его вход подключен к датчику перемещения. Таким образом, сигнал на выхоле усилителя 1 является ироиорниональным второму члену т5 разложения в ряд оператора временной задержки , где т - суммарное время задержки в ко гтуре моделирования, нолучаемое с выхода блока 6. Су.ммированием сигналов с выхода усилителя 11 и блока 4 сумматором 12 на его
выходе получается сигнал, управляющий возбудителем 9 через усилитель мощности 13 с компенсацией временной задержки в контуре .моделировання.
Устройство легко расщиряется и для исключеиия задержек, выраженных членами ряды 6o;iee высоко иорядка, т. е. -- т, -
О
и т. д. Для этого в цеиь выход предыдущего блока дифференцирования - вход сумматора 12 нодключаются дополнительные блоки диффереицироваиия, возведения в стеиень н усилнтелн с регулируемым коэффициеито.м усиления.
В устройстве получена высокая точность компенсаций задержкн в контуре иолунатурното моделировання, что увеличивает точность получаемых результатов, а также иомогает расщирить частотный диапазон нсследований реальных объектов.
Ф о р м у л а и 3 о б р е т е и и я
Остройство дл5 моделирования нелинейных колебательных систем, содержащее исследуемый объект, установленный на возбудителе колебаний, датчики параметров, уетаиовле; ных на нес.чедуемом объекте, блок моделироваиия динамичеекой еистемы, грунна входов
и первый выход которого соединеиы с грунпой входов блока оптимизации, и блок дифференцн1)овання, отличающееся тем, что, с целью увелнчения точтюсти моделирования, оно содержит усилитель, к нерному входу которого
подключен выход блока диффереицироваиия, блок онределеиия интервала времени, входы которого соединены с выходом блока моделирования динамической системы и с входо. ().тока дифференцирования, уеилитель мощиости, выход которого соединен с входом возбудителя колебаний, грунпу усилителей, нодключенплх входами к датчикам параметров, а выходами к груипе входов блока моделироваиия динамнческой системы, сумматоры, причем входы первого сумматора соединены с вы5
ходом блока оптимизации и блока определения интервала времени, а выход первого сумматора подключен к второму входу усилителя, и датчик перемещения, установленный на возбудителе колебаний, соединенный с входом блока дифференцирования, первый вход второго сумматора подключен к выходу усилителя, второй вход сумматора соединен с выходом блока моделирования динамической системы, а выход второго сумматора подключен к входу усилителя мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU607240A1 |
| Устройство для полунатурного моделирования | 1976 |
|
SU734734A1 |
| Устройство для моделирования виброударных механических систем | 1977 |
|
SU714420A1 |
| Устройство для моделирования виброзащиты оператора | 1979 |
|
SU864304A1 |
| Устройство для полунатурногоМОдЕлиРОВАНия | 1976 |
|
SU822218A2 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU516056A1 |
| Устройство для полунатурного моделирования нелинейных колебательных систем | 1980 |
|
SU947877A1 |
| Устройство для полунатурного моделирования | 1976 |
|
SU661567A1 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Устройство для моделирования ротор-НыХ СиСТЕМ | 1979 |
|
SU822221A1 |
2/,...«
