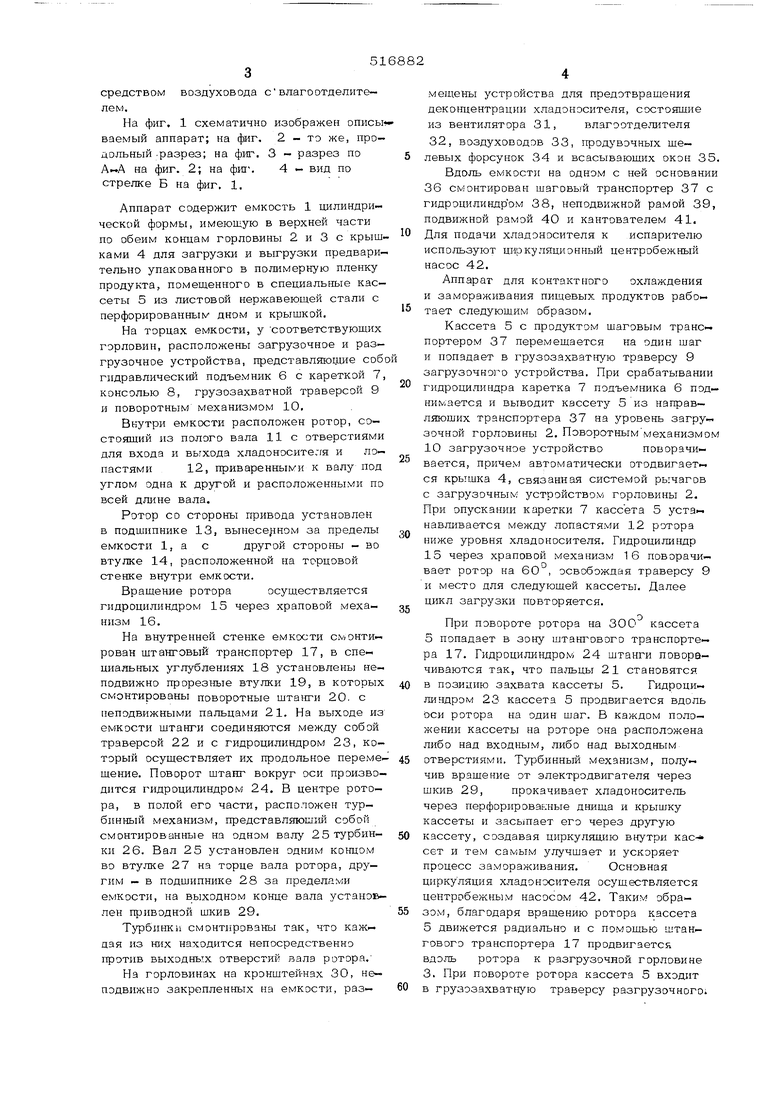
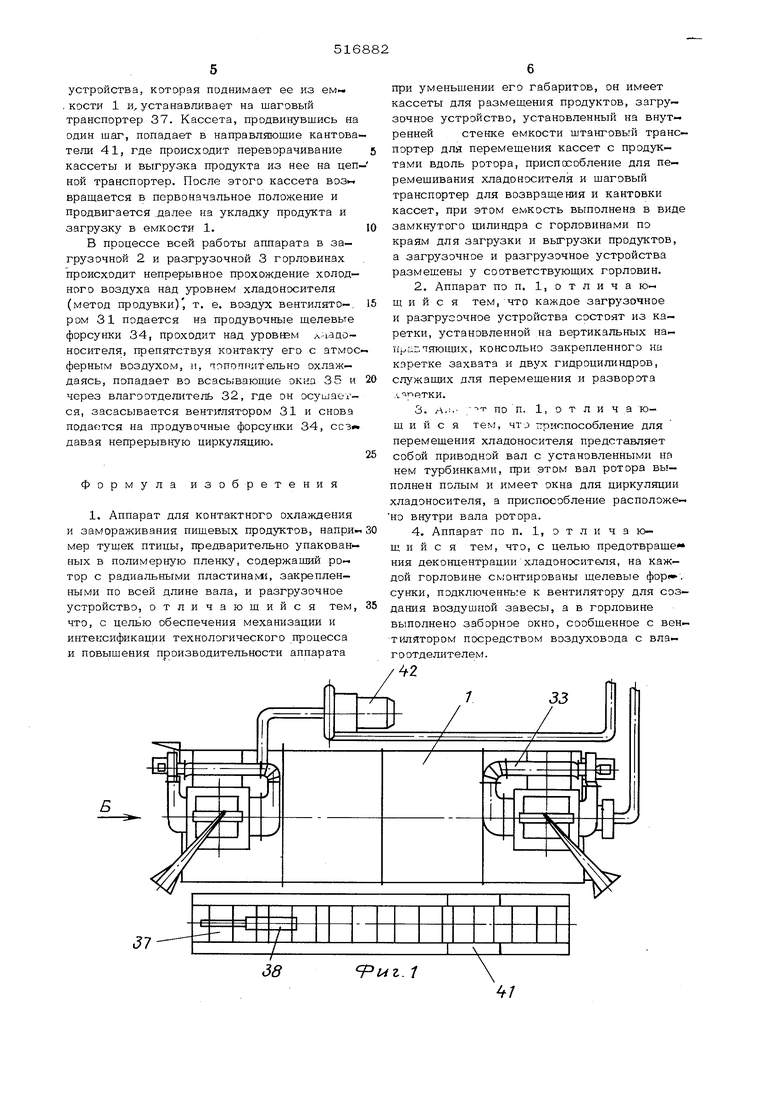
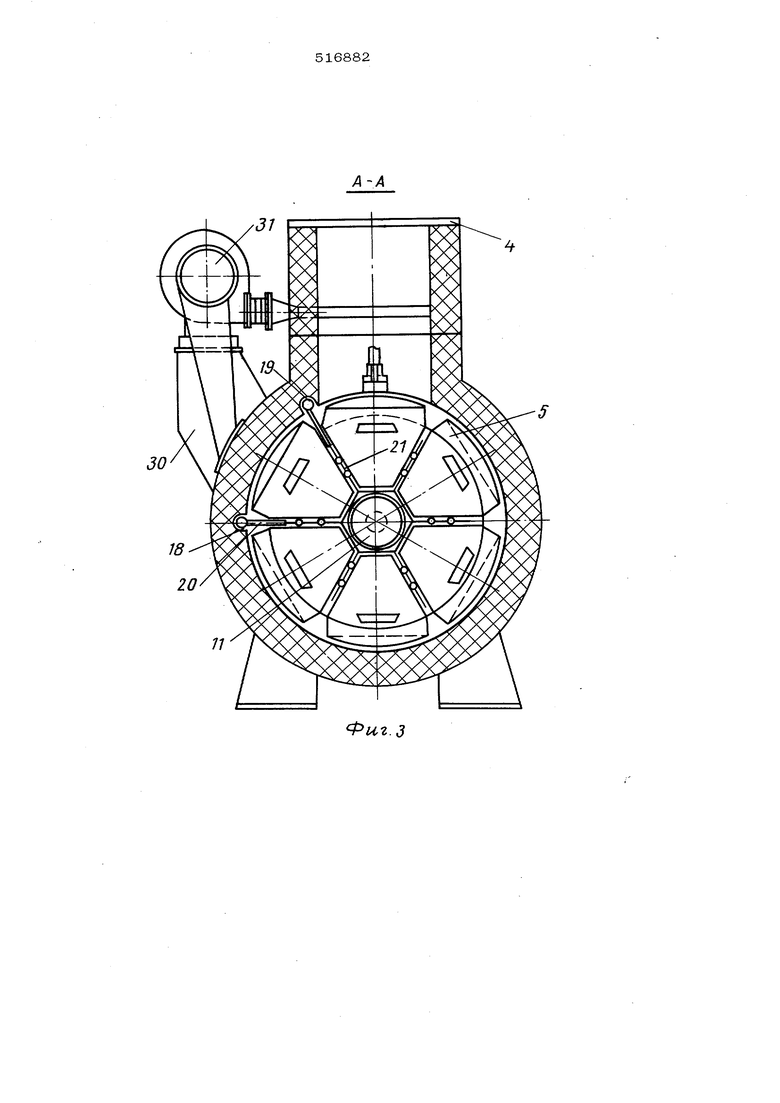
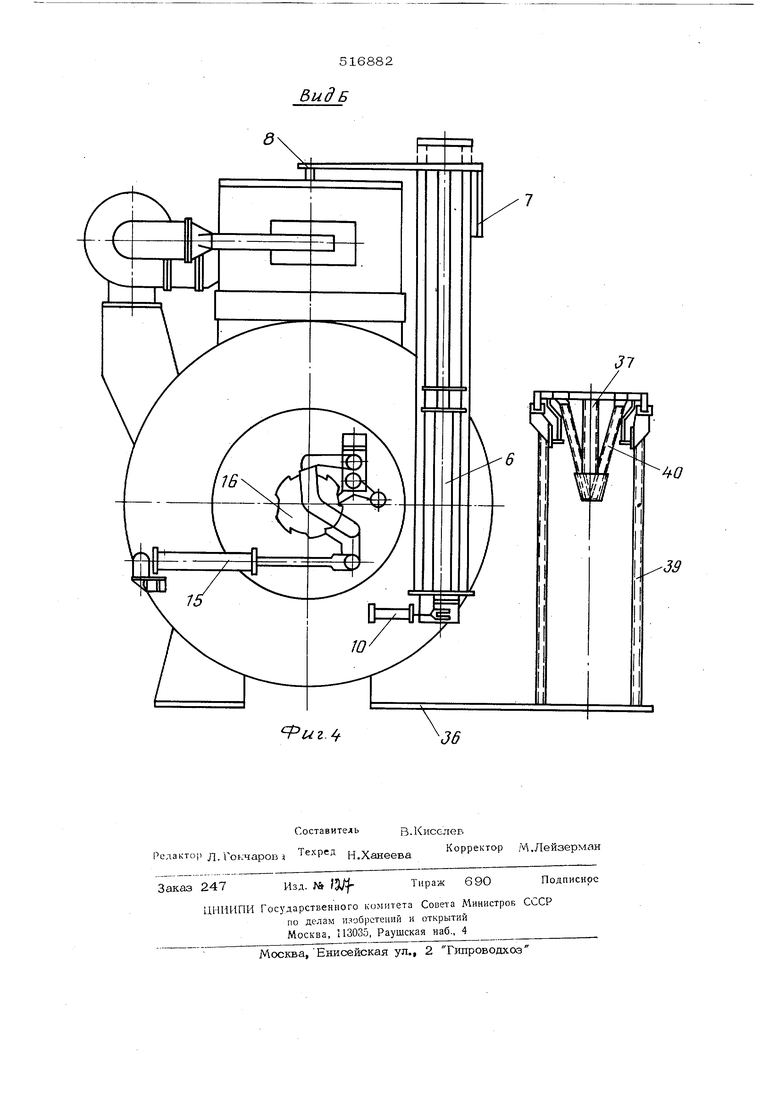
воздуховода свпагоотделите- средством лем. 1 схематично изображен описы На фиг. ваемый аппарат; на фиг. 2 - то же, продольный .разрез; на фиг. 3 - разрез по А-А на фиг. 2; на фшч 4 - вид по стрелке Б на фиг, 1. Аппарат содержит емкость 1 цилиндрической формы, имеющую в верхней части по обеим концам горловины 2 и 3 с крыш ками 4 для загрузки и выгрузки предварительно упакованного в полимерную пленку продукта, помещенного в специальные кассеты 5 из листовой нержавеющей стали с перфорированным дном и крышкой. На торцах емкости, у соответствующих горловин, расположены загрузочное и разгрузочное устройства, представляющие соб гидравлический подъемник 6 с кареткой 7 консолью 8, грузозахватной траверсой 9 и поворотным механизмом 10. Внутри емкости расположен ротор, состоящий из полого вала 11 с отверстиями для входа и выхода хладоносите.тя и лопастями12, приваренными к валу под углом одна к другой и расположенными по всей длине вала. Ротор со стороны привода установлен в подшипнике 13, вынесе 1ном за пределы емкости 1, а сдругой стороны - во втулке 14, расположенной на торцовой стенке внутри емкости. Вращение ротораосуществляется гидроцилиндром 15 через храповой механизм 16. На внутренней стенке емкости смонтирован штанговый транспортер 17, в специальных углублениях 18 установлены неподвижно прорезные втулки 19, в которых смонтированы поворотные штанги 20. с неподвижными пальцами 21. На выходе из емкости штанги соединяются между собой траверсой 22 и с гидроцилиндром 23, который осуществляет их продольное перемещение. Поворот штанг вокруг оси производится гидроцилиндром 24. В центре ротора, в полой его части, расположен турбинный механизм, представляющий собой смонтированные на одном валу 25турбинки 26. Вал 25 установлен одним концом во втулке 27 на торце вала ротора, другим - в подшипнике 28 за пределами емкости, на выходном конце вала установлен приводной шкив 29. Турбпнки смонтированы так, что каждая из них находится непосредственно против выходных отверстий вала ротора. На горловинах на кронштейнах 30, неподвижно закрепленных на емкости, раз- мещены устройства для предотвращения декощентрации хладоносителя, состоящие из вентилятора 31, влагоотделителя 32, воздуховодов 33, продувочных щелевых форсунок 34 и всасывающих окон 35. Вдоль емкости на одном с ней основании 36 смонтирован шаговый транспортер 37 с гидpoцили щpoм 38, неподвижной рамой 39, подвижной рамой 40 и кантователем 41, Для подачи хладоносителя к испарителю используют циркуляционный центробежный насос 42. Аппарат для контактного охлаждения и замораживания пищевых продуктов работает следующим образом. Кассета 5 с продуктом щаговым транс- портером 37 перемещается на один шаг и попадает в грузозахватную траверсу 9 загрузочно о устройства. При срабатывании гидроцилиндра каретка 7 подъемника 6 поднимается и выводит кассету 5 из направляющих транспортера 37 на уровень загру-, зочной горловины 2. Поворотныммеханизмом 10 загрузочное устройствоповорачивается, причем автоматически отодвигает ся крышка 4, связанная системой рычагов с загрузочным устройством горловины 2, При опускании каретки 7 кассета 5 уста- навливается между лопастями 12 ротора ниже уровня хладоносителя. Гидроцилиндр 15 через храповой механизм 16 поворачивает ротор на 60 , освобождая траверсу 9 и место для следующей кассеты. Далее цикл загрузки повторяется. При повороте ротора на 300 кассета 5 попадает в зону штангового транспортера 17. Гидроцилиндром 24 штанги поворачиваются так, что пальцы 21 становятся в позицию захвата кассеты 5. Гидроци- линдром 23 кассета 5 продвигается вдоль оси ротора на один шаг. В каждом положении кассеты на роторе она расположена либо над входным, либо над выходным отверстиями. Турбинный механизм, получив вращение от электродвигателя через шкив 29, прокачивает хладоноситель через перфорированные днища и крышку кассеты и засьшает его через другую кассету, создавая циркул5щию внутри кас.- сет и тем самым улучшает и ускоряет процесс замораживания. Основная циркуляция хладоносителя осуществляется центробежным насосом 42. Таким образом, благодаря вращению ротора кассета 5 движется радиально и с помощью штангового транспортера 17 продвигается вдоль ротора к разгрузочной горловине 3. При повороте ротора кассета 5 входит в грузозахватную траверсу разгрузочного.
устройства, которая поднимает ее из ем- .кости 1 и,устанавливает на шаговый транспортер 37. Кассета, продвинувшись на один шаг, попадает в направляющие кантователи 41, где происходит переворачивание кассеты и выгрузка продукта из нее на цепной транспортер. После этого кассета возм вращается в первоначальное положение и продвигается .далее на укладку продукта и загрузку в емкости 1.
В процессе всей работы аппарата в загрузочной 2 и разгрузочной 3 горловинах происходит непрерывное прохождение холодного воздуха над уровнем хладоносителя (метод продувки), т. е. воздух вентилято-. ром 31 подается на продувочные щелевые форсунки 34, проходит над уровЕЕМ лчадоносителя, препятствуя контакту его с атмосферным воздухом, и, т: попру тельно охлаждаясь, попадает во всасывающие окка 35 и через влагоотделитель 32, где он ocyuaevся, засасывается вентилятором 31 и снова подается на продувочные форсунки 34, ссзж давая непрерывную циркуляцию.
Формула изобретения
1. Аппарат для контактного охлаждения и замораживания пищевых продуктов, напри« мер тущек птицы, предварительно упакованных в полимерную пленку, содержащий ротор с радиальными пластинами, закрепленными по всей длине вала, и разгрузочное устройство, отличающийся тем, что, с целью обеспечения механизации и интенсификации технологического процесса и повышения п|эоизводительнссти аппарата
при уменьшении его габаритов, он имеет кассеты для размещения продуктов, загрузочное устройство, установленный на внутренней стенке емкости штанговый транспортер для перемещения кассет с продуктами вдоль ротора, приспособление для перемешивания хладоносителя и шаговый транспортер для возвращения и кантовки кассет, при этом емкость выполнена в вид замкнутого цилиндра с горловинами по краям для загрузки и выгрузки продуктов, а загрузочное и разгрузочное устройства размещены у соответствующих горловин.
2.Аппарат по п. 1,отлича ющ и и с я тем, что каждое загрузочное
и разгрузочное устройства состоят из каретки, установленной на вертикальных на- Пр тяющих, консольно закрепленного на каретке захвата и двух гидроцилиндров, служащих для перемещения и разворота .эпетки.
3.л.--:- т по п. 1, о т л и ч а ю- щ и и с я тем, что ттриппособление для перемещения хладоносителя представляет собой приводной вал с установленными ня нем турбинками, при этом вал ротора выполнен полым и имеет окна для циркуляции хладоносителя, а приспособление расположе- но внутри вала ротора.
4. Аппарат по п. 1, о т л и ч а ющ и и с я тем, что, с целью предотвращен ния декондентрации хладоносителя, на каждой горловине смонтированы щелевые фор сунки, подключенные к вентилятору для создания воздушной завесы, а в горловине выполнено заборное окно, сообщенное с вентилятором посредством воздуховода с вла- г о отделителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| Установка для прессования лао-ча | 1978 |
|
SU942655A1 |
| Устройство для перемещения листового материала | 1988 |
|
SU1581439A1 |
| Установка для штамповки деталей из листовых заготовок | 1979 |
|
SU863099A1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЙ ТРАНСПОРТИРУЮЩИХ РАБОЧИХ ОРГАНОВ ПНЕВМОИНЕРЦИОННОГО МОЛОТИЛЬНО-СЕПАРИРУЮЩЕГО УСТРОЙСТВА | 2010 |
|
RU2420053C1 |
| УСТАНОВКА ГИДРОКАВИТАЦИОННОГО РАССНАРЯЖЕНИЯ БОЕПРИПАСОВ | 2008 |
|
RU2362967C1 |
| УСТРОЙСТВО ДЛЯ ДВУХСТОРОННЕЙ ИНДИВИДУАЛЬНОЙ ОБРАБОТКИ ПОДЛОЖЕК КВАДРАТНОЙ ИЛИ ПРЯМОУГОЛЬНОЙ ФОРМЫ | 2007 |
|
RU2367526C2 |
| УСТРОЙСТВО ДЛЯ ДВУХСТОРОННЕЙ ОБРАБОТКИ ПЛАСТИН, НАПРИМЕР ФОТОШАБЛОНОВ | 2006 |
|
RU2328054C1 |
| Поточная линия для обработки штучных длинномерных изделий | 1979 |
|
SU880505A1 |
| Автоматическая линия для механической обработки деталей | 1979 |
|
SU882727A2 |
38
г. / 2 35 Р и 2.
Фиг.З
&ид Б и г.
