(54) ЛЕНТОПРОТЯЖНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Лентопротяжное устройство | 1975 |
|
SU546931A2 |
| Лентопротяжное устройство | 1981 |
|
SU945897A1 |
| Устройство для управления лентопротяжным механизмом | 1978 |
|
SU726574A1 |
| СПОСОБ УПРАВЛЕНИЯ ОСТАНОВКОЙ ЛЕНТОПРОТЯЖНОГО МЕХАНИЗМА МАГНИТОФОНА | 1990 |
|
RU2010359C1 |
| Устройство для перемещения магнитной ленты | 1989 |
|
SU1691885A1 |
| Устройство для управления натяжением магнитной ленты в лентопротяжном механизме | 1986 |
|
SU1483487A1 |
| Устройство для управления лентоприжимом аппарата магнитной записи | 1983 |
|
SU1086456A1 |
| Лентопротяжный механизм | 1981 |
|
SU974409A1 |
| Устройство для моделирования лентопротяжного механизма | 1982 |
|
SU1070574A1 |
| Устройство для транспортирования носителя информации | 1988 |
|
SU1631602A1 |
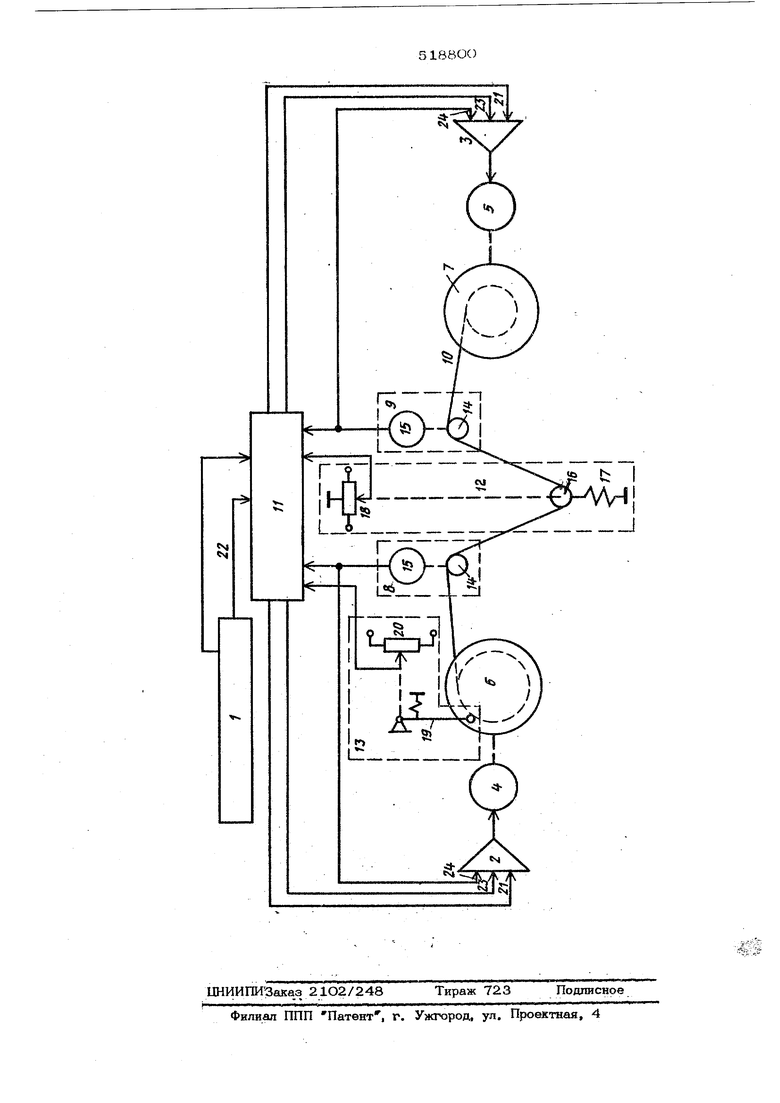
Изобретение относится к технике магниЕтной записи, а именно к лентопротяжным уст ройствам с регулированием скорости перемещения носителя с использованием измерителей скоросфи носителя, например тахометров. Известно лентопротяжное устройство, содержащее блок формирования командных сигналов, блоки управления, связанные через двигатели привода с приемо по дающими узлами, измерители скорости движения ленты и датчик натяжения ленты. Известное устройство не обладает достаточным быстродействием, а Увеличение, наппример, крутящего момента двигателей привода, с целью увеличения быстродействия, приводит к увеличению колебаний натяжения ленты. Цель изобретения - обеспечить повышение быстродействия и уменьшение колебаний натяжения ленты. Для этого в устройство введеньг сввзанный с одним из приемоподающих узлов (измеритель радиуса :намотки ленты и подключенный к нему коммутатор, входы JKOTOporo соединены с блоком командных сигналов, датчиком натяжения ленты и измерн телнми скорости движения ленты, а выходыс блоками управления. На чертеже изображен вариант предла гаемого устройства. Устройство содержит блок 1 формирования командных сигналов, блоки 2 и 3 управления двигателями 4 и 5 соответственно, приводящими во вращение приемоподающие узлы 6 и 7, Двигатели 4 и 5 и приемоподающие узлы 6 и 7 соответственно ;могут ра:ботать в режиме как ведущего, тай и ведо- JMoro привода. Устройство содержит также измерители 8 и О скорости движения ленточного носителя ленты 1О, коммутатор 11, датчик 12 натяжения носителя 1О и иэме1ритель 13 радиуса намотки ленты на приемо- подающем узле 6. Измерители 8 и 9 могут быть выполнены в виде роликов 14, сопряженных с лентой 1О и связанных с тахометь:рическим датчиками 15; датчик 12 натяжей ;Ния носителя в виде ролика 16, связанно го с пружиной 17 и потенциометром 18; а
измеритшш 13 радиуса намотки - в виде ры чйга 1.9 и потенциометра 2О, Возмони ы и «piyrne варианты вьшолнения этих узлов.
Устройство работает следующим образом.
В зависимости от распределения ленты 1О на приемоподающих узлах б и 7 по сигналу измерителя 13 радиуса намотки ленты один из двигателей 4 и 5 ставится в режим
ведущего, для чего вход 21 блока управления, связанного с этим двигателем, через Коммутатор 11 подключается к шине 22 командных сигналов, а второй из двигателей ставится в режим ведомого, для чего Вход 21 блока управления, связанного с этим двигателем, подключается через коммутатор 11 к входу датчика 12 натяжения; ленты, вход 23 того же блока-управления подключается к тому из «вмерителей 8 или 9 скорости, который ближе по чертежу к двигателю, находящемуся в ведущем режиме. В режим ведомого включается двигатель, на приемоподающем узле которого находится минимальное количество ленты. J. Меньший момент инерции за счет меньшего, чем на другом узле, количества ленты обеспочивает этому узлу лучшие динамические характеристики при отслеживании, колебаний натяжения носителя. Охват приводов цепью отрицательной обратной связи по скорости движения носителя (цепь обратной связи измеритель скорости - вход 24 блока управления) обеспечивает независимость йатяжё|ния ленты от радиуса намотки. При измено|нии соотношения количества ленты на при;емоподающих узлах функции двигателей ме|няются, т. е. ведущий двигатель становитоа ведомым, а Ведомый - ведущим при сохранении того же направления движения носителя.
Превосходство динамических характеристик ведомого привода над ведущим и переключение двигателей на оптимальный в зави- |симости от количества ленты на приемопода;ющем узле режим обеспечивает всему устроству в целом «-увеличение , быстродействия и уменьшение колебааи натяжения носителя.
Ф
изобрете ни
о р м у л а
f Лентопротяжное устройство, содержаще, блок формирования командных сигналов, блоки управления, связанные через двигатели привода с при емо по дающими узлами, изме;рители скорости движения ленты и датчик ; натяжения ленты, отличающееся тем, что, с целью повышения быстродейст-. ВИЯ и уменьшения колебаний натяжения ленты, в негоВведены; связанный с одним из приемоподающих узлов измеритель радиуса :намотки ленты и йодключенный к нему коммутатор, входы которого соединены с блоком |командных сигналов, датчиком натяжения |Ленты и нзмерйтелями скорости ленты, с. Эыходы - с блокайа управления,,
