(54) ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления скоростью перемещения магнитной ленты | 1983 |
|
SU1137521A1 |
| Лентопротяжный механизм | 1983 |
|
SU1101884A2 |
| Реверсивный лентопротяжный механизм | 1981 |
|
SU1068992A1 |
| Устройство управления скоростью перемещения магнитной ленты | 1980 |
|
SU932561A1 |
| Устройство для управления скоростью перемещения магнитной ленты | 1982 |
|
SU1056264A1 |
| Устройство для перемещения магнитной ленты | 1982 |
|
SU1027771A1 |
| Устройство для наклонно-строчной магнитной записи и воспроизведения | 1988 |
|
SU1582200A1 |
| Устройство для транспортирования носителя информации | 1988 |
|
SU1631602A1 |
| Лентопротяжный механизм для видеомагнитофона | 1975 |
|
SU792289A1 |
| Лентопротяжный механизм | 1979 |
|
SU980153A1 |
1
Изобретение относится к технике магл ,нитной записи, а именно к лентопротяжным механизмам с управлением скоростью перемещения носителя;
Известен лентопротяжный механизм, содержащий ведущий и подкатушечные узлы, каиадый из которых выполнен с ротором и пьезоэлементом, конец которого поджат к поверхности ротора, узлы прижима пьезоэлементов к роторам и узел управления, соединенный с узлами прижима Cl .
. Недостатков этого устройства зтвляется дестабилизация скорости перемещения магнитной ленты из-за изменения зацепления пьезоэлемента и ротора- и измене ния усилия прижима одноименного узла.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому «шляется устройство перемещения магнитной ленты, содержащее веду|щий и подкатушечные узлы, каждый из которых выполнен с двигателем привода, датчики скорости и натяжения ленты и
блок управления, вхрдь которого соединены с датчиками, а выходы с; двигателями привода 2.
Недостатком известного устройсгва 5шляется ухудшение компенсации колебаний скорости из-за инерционности системы регулирования.
Цель изобретения - расширение частотного диапазона компенсации колебаний скорости перемещения ленты.
Цель достигается тем, что устройство снабжено узлами прижима, а каждый из двигателей привода выполнен в виде ротора и пьезоэлемента, конец которого поджат к ротору, при этом пьеэоэлементы соединены с узлами прижима, которые подключены к. выходам блока управления.
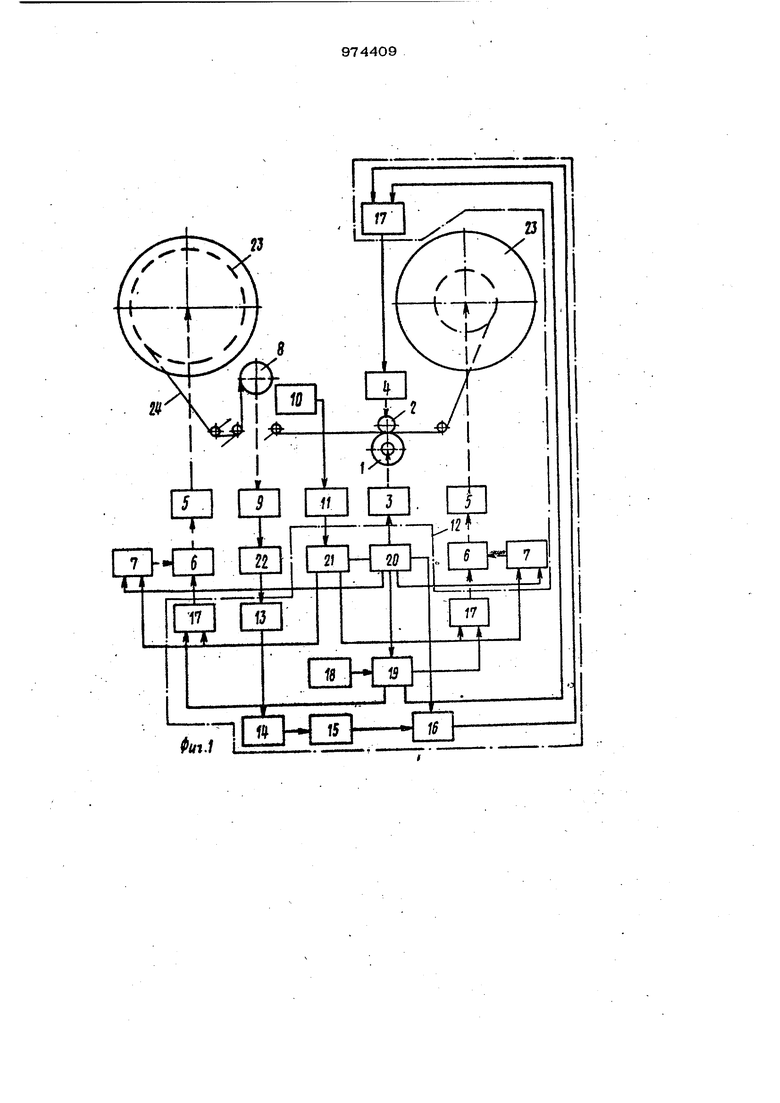
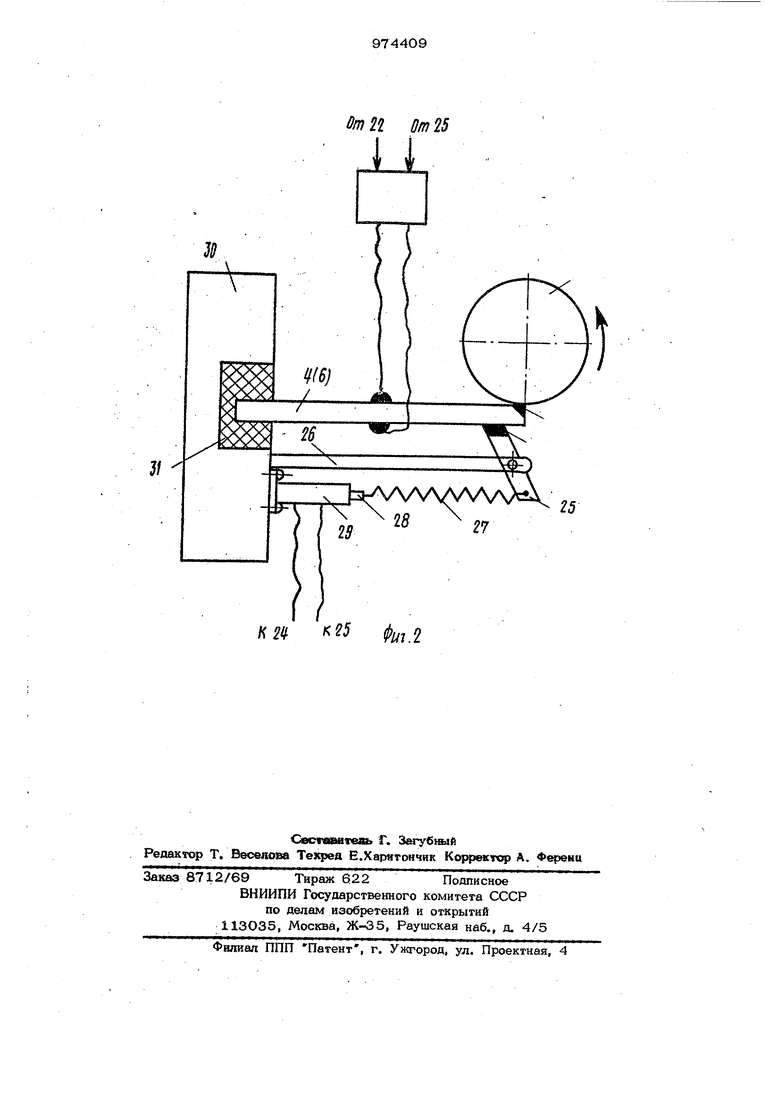
На фиг. 1 изображена структурная схема устройства; на фиг. 2 - двигатель привода с узлом прижима.
Лентопротяяшый механизм содержит ведущий узел, выполненный с при.жимным роликом 1, ведущим ротором 2, узлом 3 прижима и пьезоэлементом 4, подкатушечные узлы, каждыЯ из которых выполнен с подкатушечником 5, пьезоэлементом 6, .конец которого поджат Л ротору подкату:шечника 5, к узлом 7 прижима. Механизм содержит также обводной ролик 8, датчик 9 скорости,датчик 10 натяжения с масштабным усилителем 11 и блок 12 управления, в состав которого входят частотный детеХтор 13, усилитель 14, фильтр 15, ключ 16, модуляторы 17, задающий генератор 18, блок 19 распределения сигналов, переключатель 20 и блок 21 коммутации. Выход датчика 9 скорости соединен с блоком 12 управления через усилитель 2 Катушки 23 с магнитной лентой 24 установлены на подкатушечнцке 5. Прижим пьезоэлемента 4 (6) осушес -вляется диэлектрической пластиной 25, укрепленной на стойке 26 и соединенной пружиной 27 с якорем 28 соленоида 29. Пьезоэлемент 4 (6) закреплен в основаг НИИ 30 через эластичный элемент 31. Устройство работает следующим образом. При включении питания на пь ёзоэлементы 4 (6) приводятся во вращение ведомые элементы ведущего и подкатушечцых узлов. При отклонении скорости перемещения магнитной ленты 24 от среднего влечения, на выходе датчика 9 скорости появляется сигнал, который подается в блок 12 управления. С выхода блока 12 управления снимается сигнал управления пьезоэлементом 4. Изменением управляющего воздействия на пьезоэлемен те 4 обеспечивается компенсация отклонения скооости перемещения магнитной ленты 24. При изменении натяжения магнитной ленты 24 появляется сигнал на выходе Датчика 10 натяжения и соответственно появляется сигнал управления соленоидом 29 узла 7 прижима. Изменением прижима обеспечивается компенсация отклонения величины натяжения магнитной ленты 24. Предлагаемое изобретение позволяет расширить частотный диапазон компенсации колебаний скорости и компенсации колебаний натяжения носителя. Ф о р мула изобретения Лентопротяжный механизм, содержащий ведущий и подкатушечные узлы, каждый из которых выполнен с двигателем привода, датчики скорости и натяжения ленты и блок управления, входы которого соединены с датчиками, а выходы-с дви-i гателями привода, отличаюшийс я тем, что, с целью расширения частотного диапазона компенсации колебаний скорости перемещения ленты, он снабжен узлами прижима, а каждый из двигателей привода выполнен в виде ротора и пьезоэлемента, конец которого поджат к ротору, при этом пьезоэлементы соединены с узлами прижима, которые подключены к выходам блока управления. Источники информации, принятые во внимание при эк&пертизе 1.Авторское свидетельство СССР № 575666, кл. Q 11 В 15/18, 1976. 2.Заявка № 3007823/18-0, кл. G 11 В 15/46, 19.11.8О (прототип).
J/
к 5
От2г 8т 15
11
АЛЛЛЛЛЛл)
25
.Л 25 2Г
