ные моменты работы устройства в течение одного цикла.
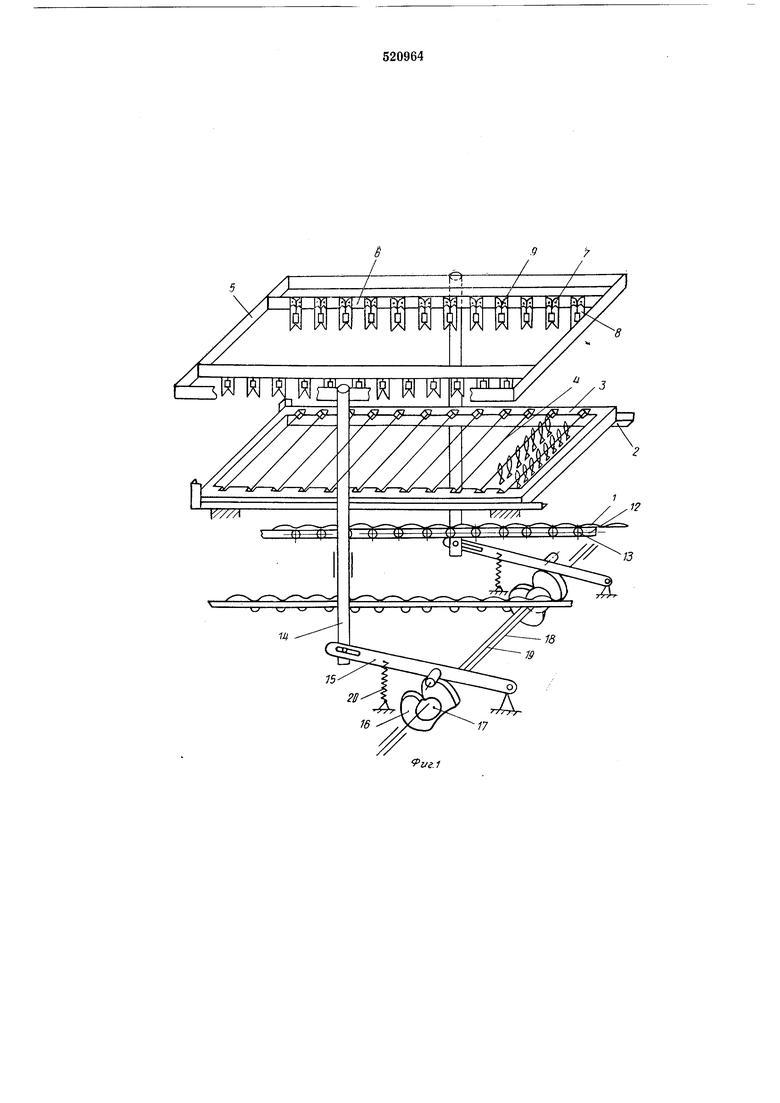
Описываемое устройство установлено над транспортером 1, выполненным с углублениями для прзтков, и состоит из неподвижно укрепленных ограничителей 2 для фиксации съемной рамки 3 с прутками 4 и рамы 5, смонтированной над ограничителями и выполненной с возможностью возвратно-поступательного перемещения по вертикали от рычажно- кулачкового-механизма.
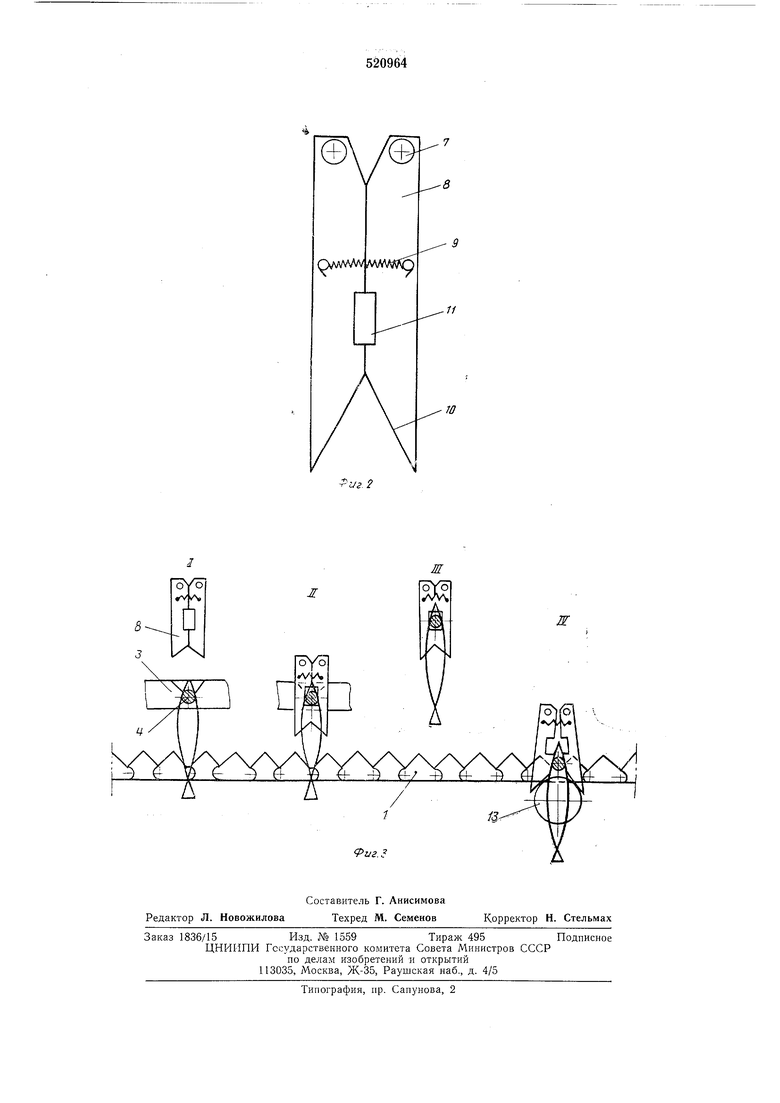
Рама 5 имеет продольные стяжки 6, на которых шарнирно установлены с помощью пальцев 7 захваты 8, каждый из которых состоит из двух планок, соединенных пружина-, ми 9 и выполненных с односторонними скосами 10 на концах и поперечными пазами 11. В одной плоскости с захватами установлены на кронштейнах 12 транспортера упоры 13. Рама 5 укреплена на вертикальных щтоках 14, соединенных с рычагами 15, взаимодействующими со спаренными кулаками 16 и 17. Последние расположены на валах 18 и 19, один из которых проходит внутри другого. Рычаги 15 соединены пружинами 20 с основанием устройства.
Работа устройства заключается в следующем.
Когда рама 5 с захватами 8 находится в верхнем положепии, рамка 3 с прутками 4 с рыбой устанавливается над транспортером 1 и с помощью ограничителей 2 фиксируется так, чтобы прутки 4 находились против захватов 8 (положение 1 на фиг. 3).
После выстоя в верхнем положении, достаточного для установки рамки 3, рама 5 опускается вниз. Захваты 8 встречают на своем пути прутки 4 с рыбой, коюрые преодолевают усилие пружины 9 при раскрытии планок захватов 8. Рама 5 опускается до тех пор, пока прутки 4 с рыбой не окажутся в поперечных пазах между планками захватов 8 (положение II на фиг. 3). Затем рама 5 с захватами 8 вместе с прутками с рыбой поднимается вверх до своего предельного положения, где некоторое время выстаивает; в это же время пустая рамка 3 вручную удаляется из ограничителей 2 (положение III на фиг. 3). На устройстве смонтирована блокировка, отключающая привод устройства, если не снята рамка с ограничителей или нет рамки с прутками с рыбой на ограничителях. В дальнейшем рама 5 с захватами 8 движется вниз на выгрузку прутков с рыбой на цепной транспортер. При этом ограничители 2 проходят между рамой и продольными стяжками. При подходе к цепному транспортеру 1 захваты 8 встречают на своем пути упоры 13, которые, попадая между скосами планок захватов 8, раскрывают их; освобожденные прутки 4 с рыбой под действием силы тяжести одновременно перегружаются в углубления цепного транспортера 1 (положение IV на фиг. 3). После этого рама 5 вновь поднимается в верхнее исходное положение. Движение цепного транспортера 1 осуществляется циклично (движение-выстой), процесс загрузки прутков на транспортер происходит в момент его выстоя, т. е. в течение
5 непродолжительного времени. Движение рамы 5 с захватами 8 и выполнение всех операций по перегрузке прутков осуществляется за счет «слежения рычагов 15 за профилем больших кулаков 16 при помощи пружин 20.
ОЖПосле перегрузки прутков 4 с рыбой на цепной транспортер 1 необходимо быстро поднять раму 5 с захватами 8, чтобы освободить место для движения цепного транспортера 1 с прутками и рыбой. Быстрый подъем рамы 5 осуществляется за счет воздействия малых кулаков 17 на рычаги 15, при этом кулаки 17 вращаются быстрее кулаков 16. После подъема рамы 5 большие кулаки 16 снова продолжают воздействовать на
0 рычаги 15. Кулаки 16, 17 закреплены на валах 18, 19, расположенных один внутри другого, и вращаются с различной угловой скоростью, например, за счет зубчатых передач (на чертеже не указаны).
5 После быстрого подъема рамы 5 в исходное положение в ограничители 2 устанавливается следующая рамка с нанизанной на прутки рыбой, и цикл повторяется; при этом пропусков по времени и месту на транспортере не будет.
Формула изобретения
1.Устройство для перегрузки прутков с рыбой с рамки на транспортер, содержащее ограничители для фиксации съемной рамки с прутками, захваты для прутков и упоры, взаимодействующие с захватами для перекладки прутков на транспортер, отличающееся тем, что, с целью повышения надежности его
0 в работе, над ограничителями укреплена рама, приводимая в возвратно-поступательное движение по вертикали, захваты для прутков смонтированы на этой раме, а упоры для перекладки прутков расположепы непосредственно под рабочей ветвью трапспортера с внутренних ее сторон.
2.Устройство по п. 1, отличающееся тем, что каждый захват состоит из двух подпружиненных планок, имеющих поперечный
0 паз, при этом нижние концы планок, примыкающие к пазу, выполнены с . односторонним скосом.
3.Устройство по п. 1, отличающееся тем, что упоры для перекладки прутков выполнены в виде укрепленных на кронщтейнах роликов.
4.Устройство по п. 1, отличающееся тем, что спаренные кулачки с различной угловой скоростью.
Источники информации, принятые во внимание при экопертизе;
1. Авт. св. № 447143 от 6.12.72 г. по кл. А 22с 25/08.
W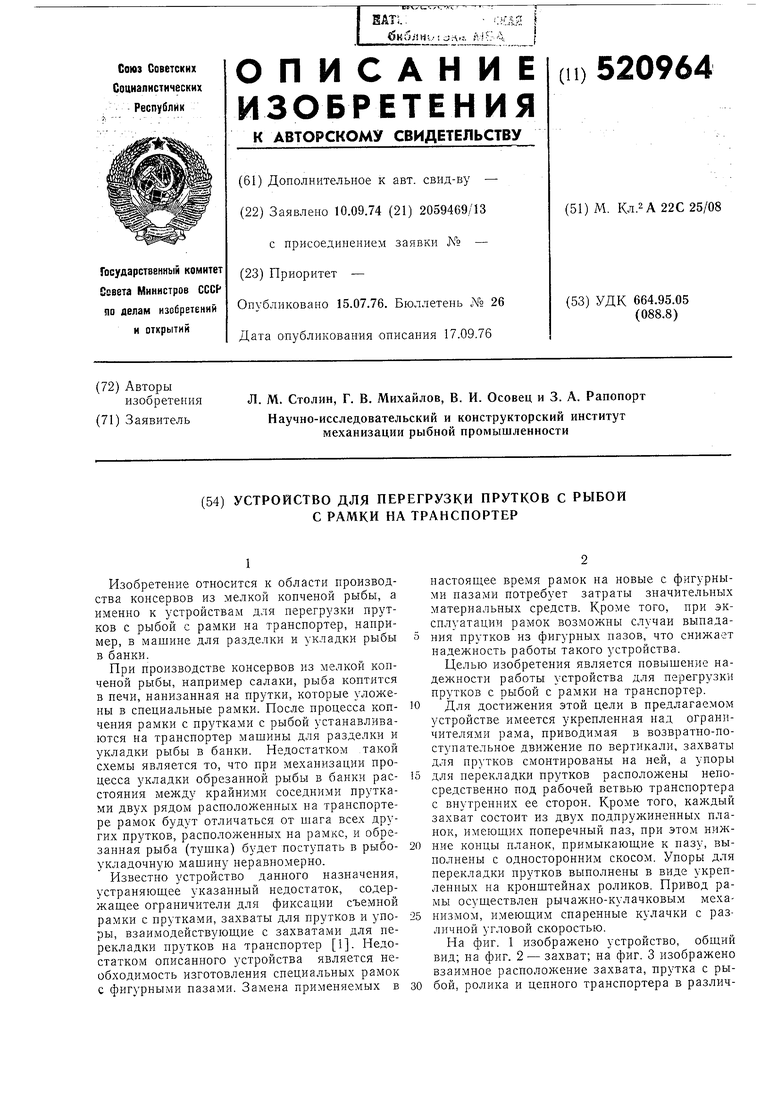
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки прутков с рыбой на транспортер | 1972 |
|
SU447143A1 |
| Машина для разделки и укладки в банки копченой рыбы | 1976 |
|
SU604550A1 |
| УСТРОЙСТВО ДЛЯ НАПОЛНЕНИЯ БАНОК РЫБОЙ | 1985 |
|
RU1438144C |
| Устройство для формирования и укладки рыбы в банки | 1981 |
|
SU988665A1 |
| Устройство для перегрузки прутков с рыбой | 1981 |
|
SU1028304A2 |
| Укладчик черепицы | 1990 |
|
SU1729759A2 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК РЫБОЙ | 2003 |
|
RU2252904C2 |
| Установка для перегрузки керамических изделий с сушильной вагонетки на обжиговую | 1981 |
|
SU994267A1 |
| Машина для филетирования рыбы | 1981 |
|
SU995722A1 |
| Устройство для перегрузки прутков с рыбой | 1977 |
|
SU736931A1 |