Изобретение относится к рыбной промьшшенности и может быть использовано в комплексно-механизированных линиях копчения, вяления и сушки рыбы для накопления, формирования и перегрузки прутков с нанизанной рыбой в клеть коптильной установки.
По основному авт.св. 736931 iизвестно устройство для перегрузки прутков с рыбойу содержащее кЬнвейер выполненный в виде пары замкнутых втулочно-роликовых цепей с направляй}1пими снабженными неуравновешенными кулачками, укрепленными на осях с возможностью поворота, и механизм перекладки прутков. Расстояние межд осями кулачков кратно расстоянию между гнездами 1спети.
Каждый неуравновешенный кулачоц выполнен в виде пластины фигурного профиля с противовесом. Механизм перекладки состоит из подвижного стола, установленного на двух вертимкальных штангах. На столе укреплены на направляюьщх гребенки, совершают tone поступательное движение по замкнутому прямоугольному контуру во, время перегрузки комплекта прутков в клеть крптяяьной установки fl.
Однако в процессе работы цепи конвейера провисают и требуют посто-, янного напряжения.
Вследствие того, что неуравновешенные купачки закреплены с наружной стороны втулочро-роликового конвейера, пруток опирается на профилированный купаЯок своими концами. Пере иецение прутков с небольшим перекоPGM ведет к тому, что один его конеЦ соскальзывает с кулачка и выводит машину из строя.
Закрепление кулачков в оДну лини1б в плане усложняет сборку пар кулачков, требует точной осевой подгонки «I отсутствие которой приводит к заклиниванию прутков при бЬльшом зазоре между паргми рядсм кулачков
Рабочий профиль кулач|са выполнен так, что в момент формирования комп«; л0кта положение прутка неустойчивое и любое усилие, иадример. от цепи конвейевра, приводит к карательному перемещению прутка от упора, и ем больше амплитуда, колебания, тем большая вероятность, что пруток, откатываясь назад от упора, доверие .кулачок в иерабочее положение и тем самым выведет устройст&о из строя. Возврат 9 рабочее положение воэможей только с помосфю оператора.
Целью изрбреа-еиия является повышение нгшежности работы устройства путем обеспечения стабильности Формирования комплекта прутков с рыбой.,
Поставленная цель достигается тем что в устройстве для перегрузки npyiков срыбой казКдая планка имеет прО|фи лированкую поверхность для размецеНИН на ней соответствующей цепи конвейера и фигурный паз, в верхней кромке которого выполнены по дуге окружности выемки для фиксирования .противовесов кулачков, а последние закреплены на планках о внутренней стороны цепей конвейера, при этом смежные кулачки каждой пары расположены с возможностью перекрывания их концов.
Выемки выполнены по всей длине паза с шагом равным расстоянию между осями кулачков.
Профиль каждого кулачка выполнен так, что несущая поверхность его в рабочем положении имеет горизонталь-v иый участок.
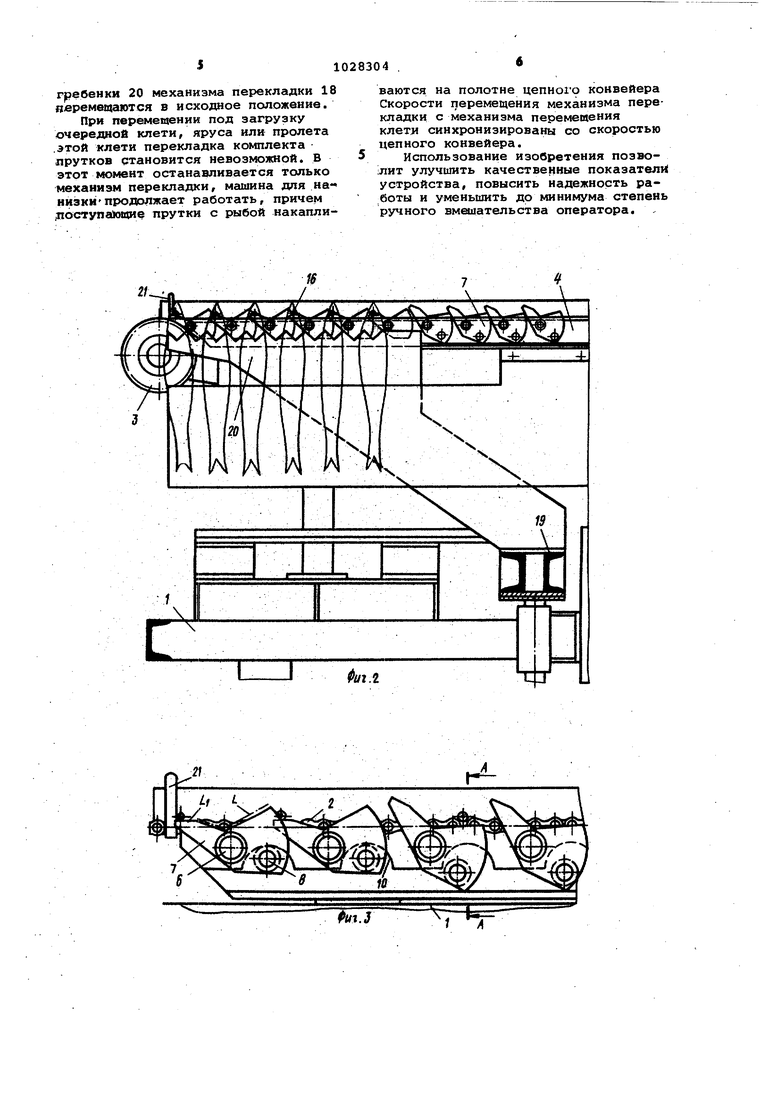
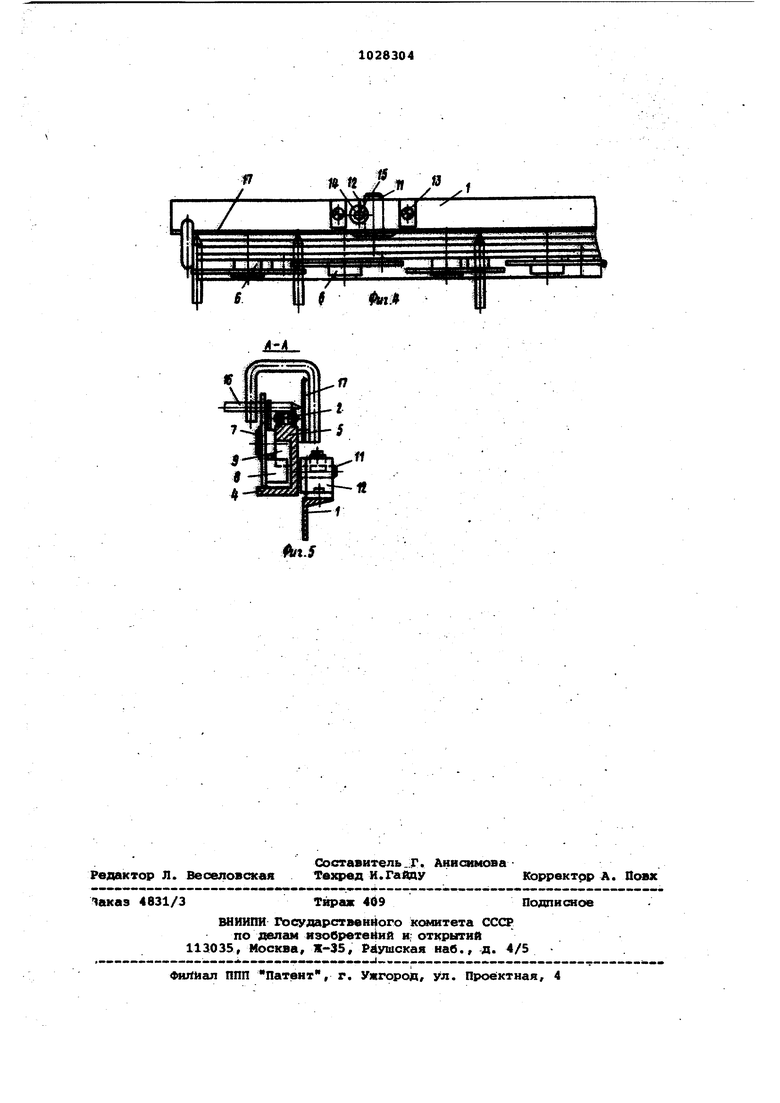
j На фиг. 1 схематично изображено ;устройство для перегрузки прутков с рыбой, ощий вид; на фиг. 2 - зона формирования комплекта прутков с на фиг. 3 - участок направляющей планки с кулачками на фиг. 4 - то ж, вид сверху на :фиг. 5 - разрез А-А на фиг. 3.
Устройство содержит укрепленный на раме 1 конвейер 2, выполненный в виде пары замкнутых втулочно-роли:ковых цепей со звездочками 3. Цепи конвейера 2 движутся по направляющим планкам 4.Кгикдая планка 4 выполнена с про-:-, филированной поверхностью, в верхней части которой по всей длине располо-жен выступ 5., фиксирующий во время . движения втулочно-роликовую цепь. С внутренней стороны цепей конвейе-.ра 2 на осях 6 укреплены на планках 4 ;с воэможносЛю поворота неуравнове|шенные кулачки 7, выполненные в виде пластин фигурного профиля с противо весом 8 цилиндрической формы.
В каждой профилированной направляющей планке 4 по всей длине выполнен фигурный паз 9, который в верхней кромке имеет выемки 10, выполнейные по дуге окружности, радиус обра-i KOTopfcpt больше диаметра противовесов 8. Выемки 10 расположены с шагом равным расстоянию между осями-6 кулачков 7 и служат дпя.фик- сирования противовесов 8 в рабочем режиме кулачков 7.
Направляющие планки 4 прикреплены ,к раме 1 пара РЬ1ельно одна japyroR с помаасью осей 11, жестко укрепленных на планках 4 с определенным шагом. 1фепление осу1цествляется следующим образом: корпус 12 крепится к раме 1 винтанш 13, затем ввоДят в корпус 12 соответствующую ось 11, выставляют планки 4 параллельно, и фиксируют оси 11 в корпусе 12 с помощью запорной втулки 14 и болта 15 для предотврав(ения смещений осей 11.
Профилированная пластина каждого . иеуравновешеиного кулачка 7 выполнена, так, что ее несущая поверхностьЬ. (фиг. 3} имеет участок Ц , который в рабочем режиме выставляется горизонтально, что (Предотвращает колеба ния прутка 16 с рыбой в зоне формирования ряда. . ПрО1филь пластины кулачка, а такж масса противовеса выбрани так, чтоб пруток 16 с- минимальной массой рыбы в 1 кг мог создать момент, позволяЬощий повернуть его в рабочий режим, не нарушая при этом контакта с поло ном цепного конвейера 2. В нерабочем (исходном) режиме верхний конец кулачка 7 (фиг. 3) выступает над полотном вдоль рабоче зоны конвейера 2, а противоположный конец с противовесом 8 упнрается в нижнюю шютупакккую часть фигурного паза 9 направляющей планки 4. В рабочем режиме пруток 16 с рыбой опирается на пару кулачков 7 при этом противовес 8 входит в выем ку 10 паза 9 и фиксируется в ее верхней части, а кулачки 7 создают надежный упор для следующего прутка 16. При этом пруток 16 лежит на горизонтальной поверхности Ь кулач ка Т, что исключает колебание его под действием.внешних сил, например движУ1аихся цепей конвейера 2. Неуравновешенные кулачки 7 эак.реплены на планках 4с внутрен ней стор 1ш кепей конвейера 2 так, чтобы концы каждой: пары рядом стоящих неуравновешенных кулачков 7перекрывали в план ОДИН другой. ; Такое- закрепление кулачков 7 позволяет устойчиво фо| «ировать ксшплект прутков 16 с рыбой даже в случае перемещения их с перекосом, i Условно рабочую длину цепногр .Конвейера 2 устройства делят на две |зоны: зону формирования ряда и зону {Накопления i. Направляющее 17 ус а :новлены с внешней стороныконвё ра ог раничивают от осевого омещения прутки 16 с рыбой. Механизм переклгщки 18 состоит: и подвижного: стола 19, на котором yer но&лены гребенки 20, совершакЮйе поступательное движение по зги кнутЬ му. прямоугольнс 1у контуру. Зона формирования пруткдв 16 с 1Шбой ограничена с одной Неподвижным упором 21, а С другой датчиком, (не показан), крнтролирукидим и сигналиэируЮцйм .об окончании набора ряда прутков 16. Устройство работает следующим образом.: С наиизочной машины прутки 16 с рыбой направляются по копиру на полотно цепного конвейера 2 с опред ленным шагом и перемещаются им к зоне формирования комплекта. Каждый пруток 16 проходит последовательно все пары неуравнов оенных кулачков Первый пруток 16 утапливает своей массой последнкяо пару кулачков 7 и фиксируется жестким упором 21, в результате чего создается возможнос1 ь формйрювания комплекта прутков 16 с рыбой с шагом равным расстоянию межг ду гнездами jvisi прутков клети с последующей перегрузки их в клеть. Положение кулачков 7 при наличии на них П1эутко5 16 с рыбой является рабочим: каждый следуюгдай пруток 16, останав ливаясь перед временным упором, созданным парой кулачков 7, сам соз дает упор для последующего прутка 16. Так осуществляется формирование ксмлплекта прутков 16 и накопление их на полотне непрерывно движущегося Цепного конвейера 2. Цепи конвейера 2 перемещаются по; направляющим планкам 4, что исклв чаёт их провисанне под действием массй прутков 16 с рыбой, а выступ 5 в верхней части каждой профилированной планки 4 фиксирует цепь во время движения ее по направляпе ей планке. Датчик, установленный на границе зоны формирования и накопления, сигнализирует о наборе ряда прутков 16 и дает команду на включение механизма перекладки. ПереклсЩка прутков 16 с рыбой производится непосфедственио -в клеть коптильной установки следующим образс. При подъеме подвижного сто ла 19 грЬбенки 20 снимают кс тлект прутков 16 с цепного полотна конвейера 2. Кулачки 7 в зоне формирова- ния возвращаются при этом в нерабочее (исходное) положение и начинают пропускать прутки 16 с рыбой для ко в1лектования следукяцей партии. Размещение кулачков 7 на планке 4 с внутренней стороны цепей конвейера 2 обеспечивает устойчивое положе ,нне прутков 16 на кулачках 7 в зоне .форкшрования даже в случае перемещения их с переко.сом. Крепление кулачков 7 к планке 4 с перекрытие концов способствует , что при движении кулачков 7 из рабочего пойожения в исходное и обратно колебакия рядом стоя1цих кулачков 7 совершаются в разных плоскостях, что позволяет избежать заклинивания прутков 16 и подгонки пар кулачков 7 при сборке устройства. При движении кулачков 7 из исходного положения в рабочее противовеса 8 перемещаются в иределах фигурного паза 9 э.выемке 10, что обеспечивает надежную фиксацию кулачков 7 в рабочей режимеу исключает переворачивание кулачков 7 в нерабочее положение и, как следствие, вывод устройства из рабочего.режима. . Гребенки 20 с прутками 16, двига ясь по замкнутбму контуру, входят в пролет клети и укладывают прутки 16 в гнезда гребенок клети. После этоги
гребенки 20 механизма перекладки 18 яеремещгиотся в исходное положение.
При перемещении под загрузку очередной клети, яруса или пролета .этой клети перекладка комплекта прутков становится нeвoз южнoй. В этот момент останавливается только механизм перекладки, машина для на- низкиПродолжает работать, причем поступающие прутки с рыбой накапливаются на полотне цепно1о конвейера Скорости перемещения механизма перекладки с механизма перемещения синхронизированы со скоростью цепного конвейера.
Использование изобретения позволит улучшить качественные показатели устройства, повысить надежность работы и уменьшить до минимума степень ручного вмеиательства оператора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки прутков с рыбой | 1977 |
|
SU736931A1 |
| Устройство для нанизывания рыбы на прутки | 1983 |
|
SU1205865A1 |
| Устройство для нанизывания рыбы | 1981 |
|
SU1012861A1 |
| Машина для разделки и укладки в банки копченой рыбы | 1976 |
|
SU604550A1 |
| Машина для нанизывания рыбы на прутки | 1991 |
|
SU1780684A1 |
| Машина для рядовой укладки мелкой рыбы в фигурные консервные банки | 1958 |
|
SU119123A1 |
| Машина для нанизывания рыбы на прутки | 1975 |
|
SU591167A1 |
| Машина для нанизывания рыбы на прутки | 1983 |
|
SU1128889A1 |
| Устройство для нанизывания рыбы на прутки | 1983 |
|
SU1103839A1 |
| Устройство для нанизывания на прутки мелкой рыбы | 1976 |
|
SU591168A1 |
1. УСТРОЙСТВО ДЛЯ ПБРЕГРУЗЧ КИ ПРУТКОВ С РЫБОЙ ПО авт. св. 736931, отличаю щ е, е г., с я тем, что, с целью повьааения надежности путем обеспечения стабильности формирования комплекта прутков с рыбой, кёшдая планка имеет профилированную поверхность для i размещения на ней соответствуко Й цепи конвейера и фигурный паэ, в верхней кромке оторохчэ выполнены по дуге окружности выемки для фикси рования противовесов кулачков,.а последние закреплены на планках с внутренней стороны цепей 1сонвейера1 при этом смежные кулачки каждой парГы расположены с возг южност1 ю перекрывания их концов. 2.. Устройство по п. 1, о т л ич а ю ц е. е с я тем, что выемки выполнены по всей длине паза с шагс 1 равным расстоянию между осями кулачков. 3. Устройство по п. 1, о т л и:ча ю « ее с я тем, что профиль каждого кулачка выполнен так, что несущая поверхность его в рабочем положений имеет горизонтальный участок.
л f
HJ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
