(54) ГОРИЗОНТАЛЬНО ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР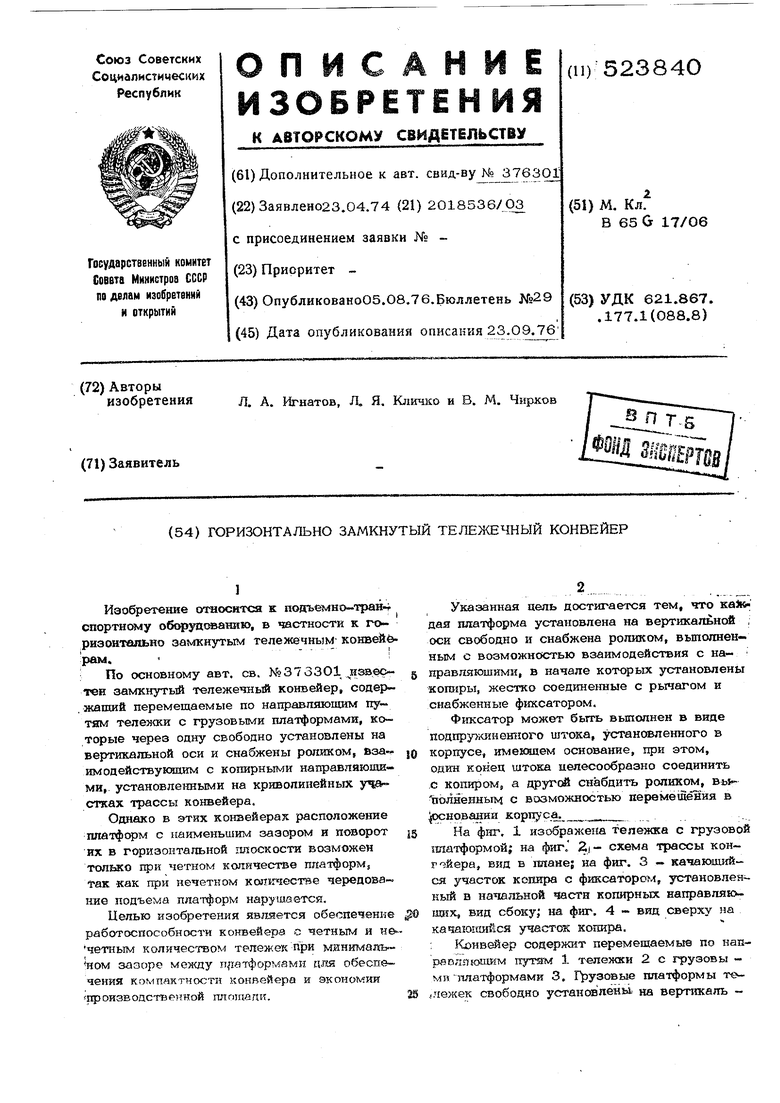
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1983 |
|
SU1131782A1 |
| ГОРИЗОНТАЛЬНО-ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1973 |
|
SU376301A1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Горизонтально-замкнутый тележечный конвейер | 1977 |
|
SU673547A1 |
| Горизонтально замкнутый тележечный конвейер | 1978 |
|
SU785133A1 |
| Горизонтально-замкнутый конвейер | 1977 |
|
SU685576A1 |
| ВЕРТИКАЛЬНО-ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1967 |
|
SU206392A1 |
| Приемно-передаточное устройство для линии металлообработки | 1984 |
|
SU1192946A1 |
| Гибкая автоматизированная сборочная линия | 1986 |
|
SU1344582A1 |
| ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1973 |
|
SU387890A1 |
1
Изобретение относится к поя:ь емно-тран-4 спортнсму об«фудсванию, в частности к горизонтально замкнутым тележечным- конвейерам. : По основному авт. св. №373301 известен замкнутый тележечный конвейер, содер- . жащий перемещаемые по направляющим путям теленжи с грузовыми платформами, которые через одну свободно установлены на вертикальной оси и снабжены роликом, вза имодействукшхим с копирными направляющими,, установленными на криволинейных у ьастках трассы конвейера.
Однако в этих конвейерах расположение платформ с наименьшим зазором и поворот их в горизонтальной плоскости возможен только при четном колйчестпзе ппатформ, так как при нечетком копггчестве чередование подъема платформ нарушается.
Целью изобретения является обеспечение работоспособности конвейера с четньпл и н& четным количеством тележек при минималь ном зазоре между п хатформами цля обеспечения компактнос::тн конвейера и экономии производстве)шой площади.
Указанная цель достигается тем, что ка)к дан платформа установлена на вертикальной , оси свободно и снабжена роликом, вьтолнен- ным с возможностью взаимодействия с направляюшями, в начале котсрых установлены копиры, жестко соединенные с рычагом и снабженные фиксатором.
Фиксатор может быть выполнен в виде подпружиненного штока, установленного в
корпусе, имекяием основание, при этом, один конец штока иелесообразно соединить с копиром, а другсй снабдить роликом, выполненным с возможностью перемё12ёния в новании корпуса.
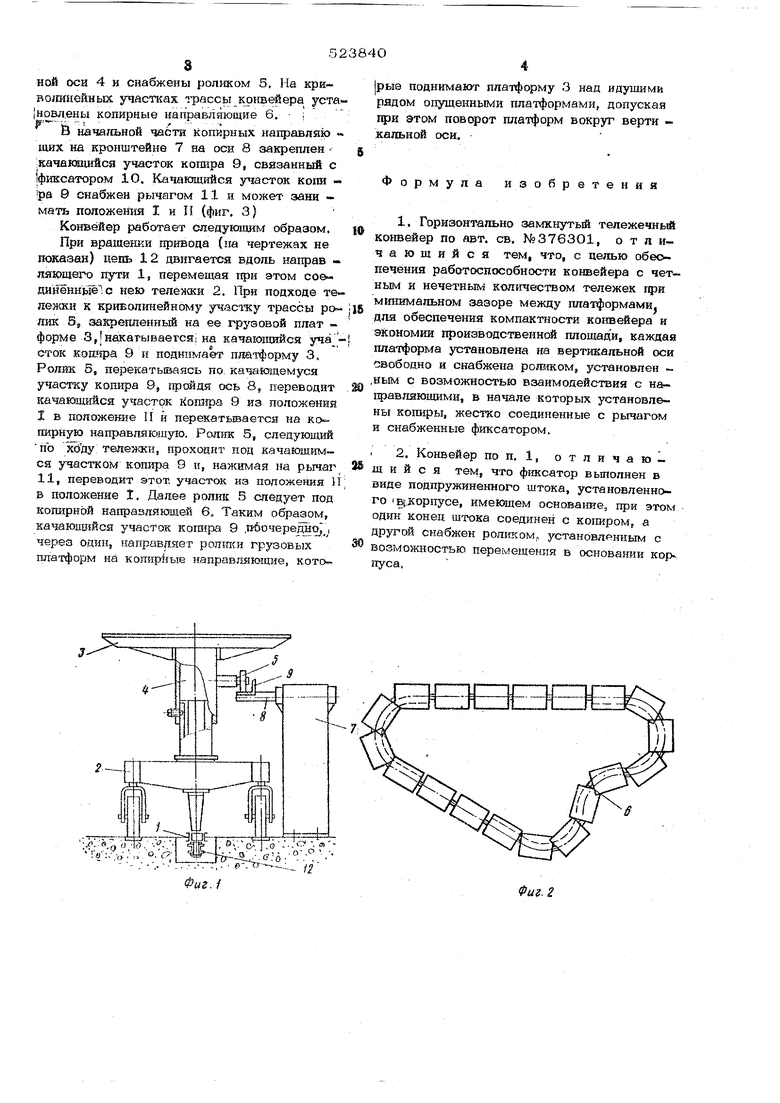
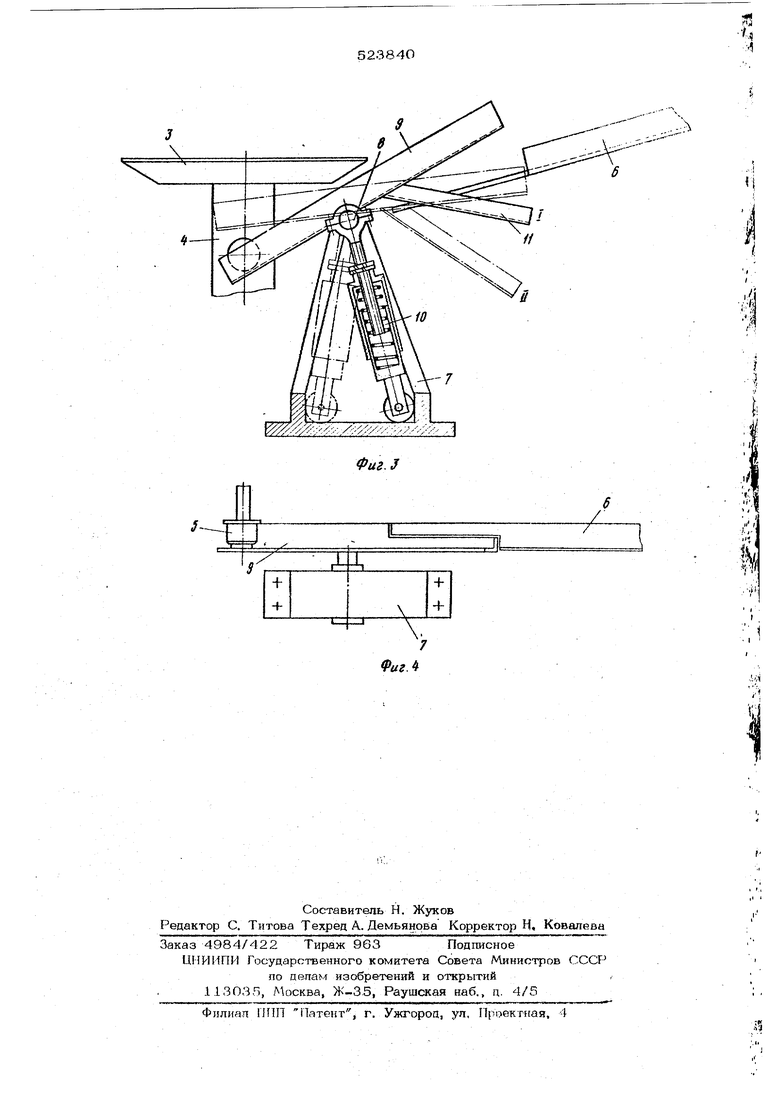
На фиг, 1 изображена тележка с грузовой 5шатформой; на ф51Г. 2| - схема трассы кон Гэйера, вид в плане; на фиг. 3 - качакацийся участок коюфа с фиксатором, установленный в начальной части копирньЕк направляющих, вид сбоку; на фиг. 4 вид сверху на ка шюншйся участок копира. : Конвейер содержит перемещаемые по неправ путам 1 тележки 2 с грузов ы - ми зтяатформами 3, Грузовые платформы те
..яежек свободно установлены- на вертикаль ной ося 4 и снабжены роликом 5, На криволинейных учасТ1{ах трассы конвейера уста|новл,ены копирные наг1равляющие 6. ; . В нача/сьной части копкрных направляю щих на кронштейне 7 на оси 8 закреплен ;кача1шцгйся участок когафа 9, связанный с |фиксатором 10. Капающийся y jacroK копи ipa 9 снабжен рычагом 11 и может- зани мать положения I и П (фиг. 3) Конвейер работает следующим образом. При врашегши прнвода (па чертежах не показан) цепь 12 двигается вдоль направ лягрщего пути 1, перемещая при этом сое динённыёс нею телеяжи 2. При подходе те.. лежки к криволинейному участау трассы ролик 5j зазфепленный на ее грузовой плат форме 3,1 накагываегсЯ| на качающийся сток кошфа 9 и поднимает платформу 3. РОЛИК S, перекатываясь по. качакядемуся участку кошфа 9, пройдя ось 8 переводит качашшийся участок кошфа 9 из положения I в положешю И и перекатьюается на копирную направляющую. Рсметк 5, следующий по хЬду: тележки, проходит под качающим™ CS участком коп1фа 9 и, нажимая на рычаг 11, переводит этот, участок из положения в положение 1. Даяее ролик 5 следует под кошфной напразляюнтей 6, Таким образом, качаюшШся участок копира 9 .пбочередно через один, направляет грузовых платформ на копирйые направляющие, кото
Фиг.1
Фиг. 2 1рые поднимают платформу 3 над идущими рядом опущенными платформами, допуская при этом поворот платформ вокруг верти кальной оси. Формула изобретения 1. Горизонтально замкнутьй тележечный конвейер по авт. св. №376301, о т л и чающийся тем, что, с целью обеопечения работоспособности конвейера с чет ным и нечетным кол1гчеством тележек цри минимальном зазоре между платформами, lu а .мами, для обеспечения компактности коюзейера и экономии производственнсй площади, каждая платформа установлена на вертикальной оси свободно и снабжена роликом, установлен ,ным с возможностью взаимодействия с направляющими, в начале которых установл&ны копиры, жестко соединенные с рычагом и снабженные фиксатором. 2. Ко1шейер по п. 1, отличающ и и с я тем, что фшссатор выполнен в виде подпружиненного штока, установленного 1Б{.Корпусе, имеющем основание,, при этом один конец штока соединен с копиром а другой снабжен роликом, установленным с возможностью перемещения в основании кор, пуса.
им
Г
-.
..-;
