Изобретение относится к области машиностроения, в частности к приемно-передаточным устройствам линии металлообработки.
Целью изобретения является расширение технологических возможностей приемнонередаточного устройства путем обеспечения обслуживания технологических позиций линии, расположенных не только перпендикулярно транспортной системе, но и параллельно ей.
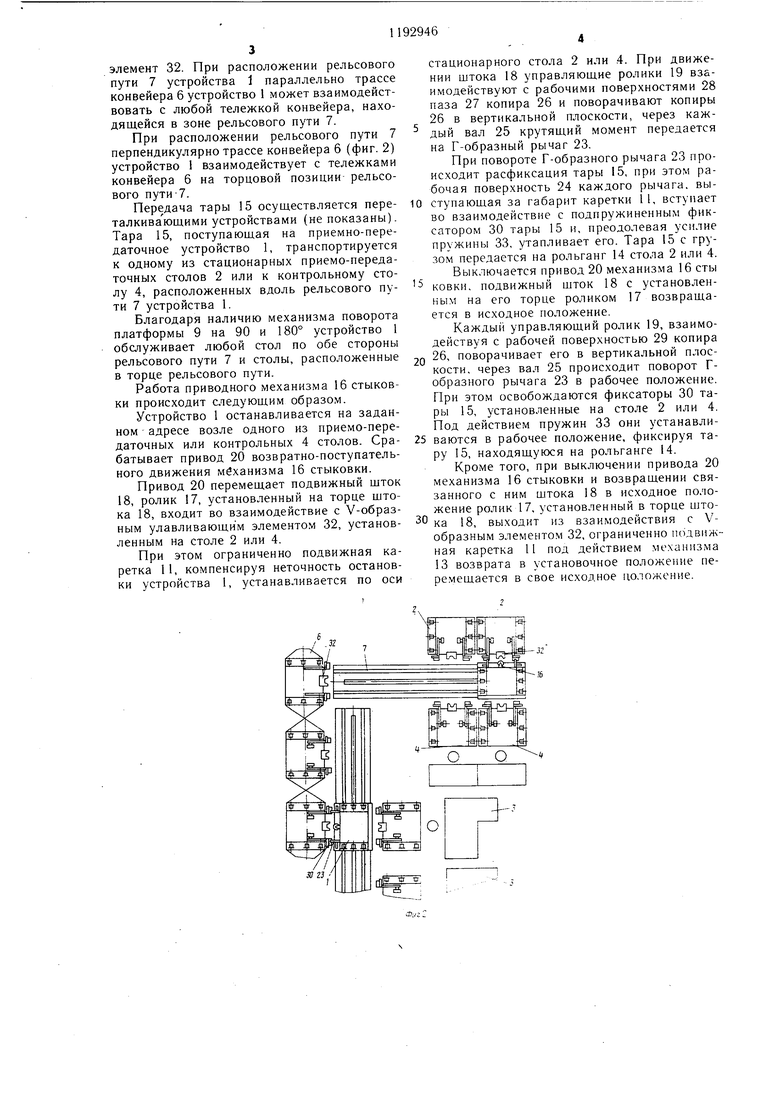
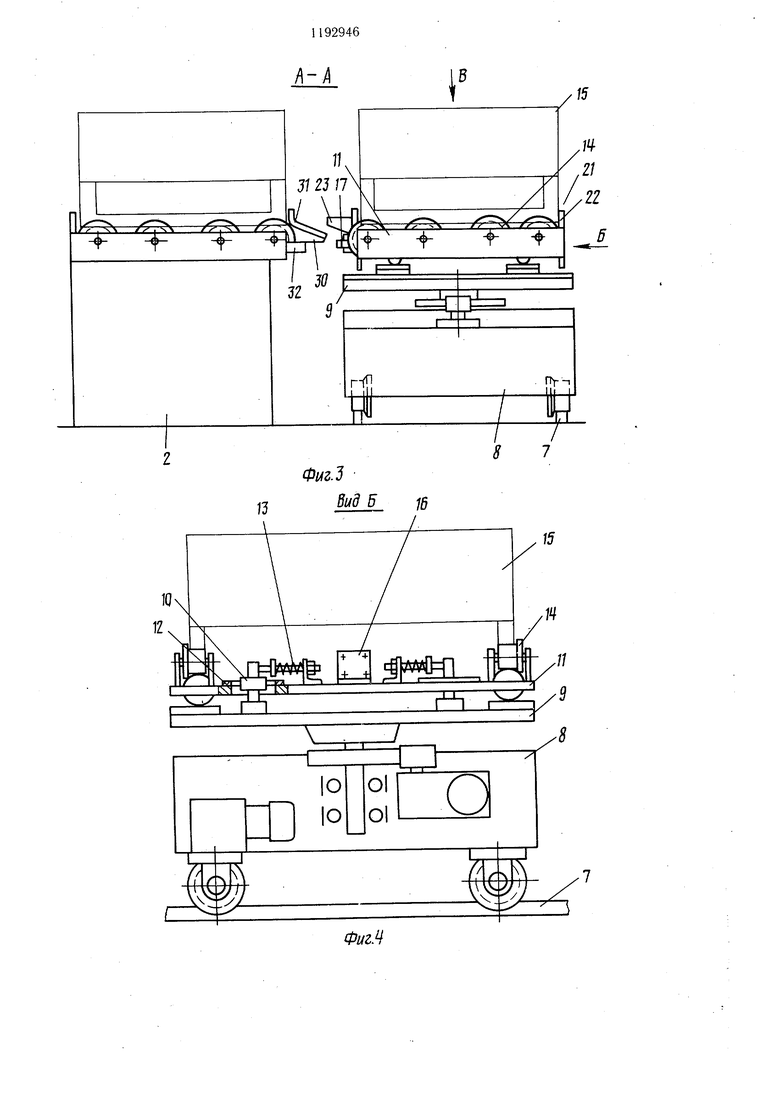
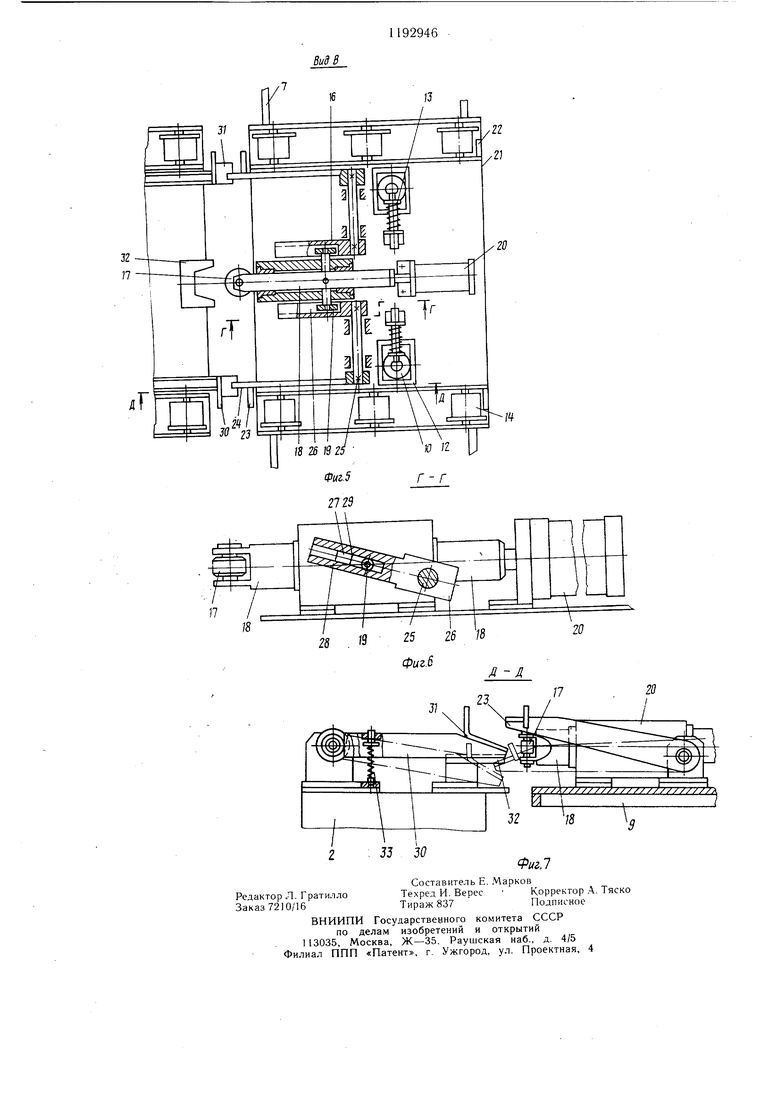
На фиг. 1 схематически изображена линия металлообработки, план (магистральная система выполнена в виде кранаштабелера); на фиг.. 2 - то же, вариант (магистральная транспортная система выполнена в виде горизонтального замкнутого тележечного конвейера); на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - вид В на фиг. 3; на фиг. 6 - сечение Г-Г на фиг. 5; на фиг. 7 - сечение Д-Д на фиг. 5.
Приемно-передаточное устройство 1 соединяет между собой стационарные приемопередаточные столы 2 технологических позиций со станками 3, контрольные столы 4 и магистральную транспортную систему, выполненную в виде кран-оператора 5 (фиг. 1) или горизонтально замкнутого тележечного конвейера 6 (фиг. 2).
Устройство 1 перемешается по рельсовому пути 7.
Приемно-передаточное устройство состоит из рельсовой тележки 8, на которой смонтирована поворотная платформа 9 с роликами 10 и органиченно подвижная каретка 11, содержашая направляющие 12, взаимодействующие с роликами 10, и механизм 13 возврата в установочное положение.
Привод поворота обеспечивает поворот платформы 9 па 90° или 180°. На каретке 1 устройства 1, на приемо-передаточных столах 2 и контрольных столах 4 установлены рольганги 14, предназначенные для установки на них тары 15.
На каретке 1 1 между рольган1ами 14 установлен приводной механизм стыковки со смежным оборудованием 16, кото)ый содер жит ролик 17, установленный на торце 111)движного ujTOKa 18, снабженного управляющими роликами 19 и связанного с приводом 20 возвратно-поступательною движения.
Фиксация тары 15 на рольган|-ах 14 с нерабочей стороны 21 каретки (клществляется при помощи жестких упоров 22, а со стороны загрузки-выгрузки Г-образными рычагами 23, рабочая пслк-рхноси) 24 которых выступает за габарит к-арстки. а каждый рычаг 23 через вал 25 связан с yiiрав.1яющим роликом 19 подвижного штока 18. Причем рычаг 23 и копир 26 жестко установлены на валу 25 (фиг. 5). .
Для взаимодействия с управляющими роликами 19 каждый копир 26 имеет паз 27 с рабочими поверхностями 28 и 29 (фиг. 6).
На металлоконструкциях стационарных приемо-передаточных столов 2 и контрольных столов 4 установлены подпружиненные фиксаторы 30 тары, рабочие площадки 31 которых выступают за габарит стола, и V-образные улавливающие элементы 32. Фиксаторы тары снабжены пружинами 33. Каждый V-образный улавливающий элемент 32 установлен с возможностью взаимодействия с роликом 17 механизма 16 стыковки приемно-передаточного устройства 1.
Устройство работает следующим образом.
Затаренные грузы перемещаются по магистральной транспортной системе, которая выполнена, например, в виде кранаоператора 5 (фиг. 1) или горизонтально замкнутого тележечного конвейера 6 (фиг. 2)
Причем рельсовый путь 7 приемно-передаточного устройства 1 может располагать0ся перпендикулярно трассе магистральной транспортной системы или параллельно ей (фиг. 1 и 2).
Вдоль рельсового пути 7 устройства 1 располагаются стационарные приемо-передаточные столы 2 технологических позиций и контрольные столы 4.
При расположении рельсового пути 7 приемно-передаточного устройства 1 перпендикулярно трассе транспортной системы 5 или 6 одна из торцовых позиций являет0ся местом перегрузки изделий. При расположении рельсового пути 7 параллельно трассе транспортной системы место перегрузки может быть организовано на любой позиции, непосредственно примыкающей к это11 системе.
При работе устройства с кран-оператором 5 (фиг. 1) V-образный улавливающий элемент 32 устанавливается на позиции перегрузки в торце рельсового пути 7, расгголоженного перпендикулярно трассе краноператора 5.
0
На этой позиции ролик 17 механизма 16 стыковки устройства 1, взаимодействуя с Vобразным элементом 32, центрирует ограниченно подвижную каретку 11 относительно продольной оси рельсового пути 7, кран5оператор при помощи телескопических стволов устанавливает тару 15 непосредственно, на устройства 1 или забирает тару с устройства 1. При расположении рельсового пути 7 параллельно трассе кран-оператора тару 15 можно также устанавливать не0посредственно на устройство 1 или создать промежуточный склад в виде ряда приемопередаточных столов 2, установленных параллельно трассе кран-оператора 5 (фиг. 1).
5 При работе устройства.1 с горизонтально замкнутым тележечным конвейером 6 (фиг. 2) на каждой тележке конвейера устанавливается V-образный улавливающий
элемент 32. При расположении рельсового пути 7 устройства 1 параллельно трассе конвейера 6 устройство 1 может взаимодействовать с любой тележкой конвейера, находящейся в зоне рельсового пути 7.
При расположении рельсового пути 7 перпендикулярно трассе конвейера 6 (фиг. 2) устройство 1 взаимодействует с тележками конвейера 6 на торцовой позиции рельсового пути-7.
Передача тары 15 осуществляется переталкивающими устройствами (не показаны). Тара 15, поступающая на приемно-передаточное устройство 1, транспортируется к одному из стационарных приемо-передаточных столов 2 или к контрольному столу 4, расположенных вдоль рельсового пути 7 устройства 1.
Благодаря наличию механизма поворота платформы 9 на 90 и 180° устройство 1 обслуживает любой стол по обе стороны рельсового пути 7 и столы, расположенные в торце рельсового пути.
Работа приводного механизма 16 стыковки происходит следующим образом.
Устройство 1 останавливается на заданном адресе возле одного из приемо-передаточных или контрольных 4 столов. Срабатывает привод 20 возвратно-поступательного движения механизма 16 стыковки.
Привод 20 перемещает подвижный щток 18, ролик 17, установленный на торце щтока 18, входит во взаимодействие с V-образным улавливающим элементом 32, установленным на столе 2 или 4.
При этом ограниченно подвижная каретка 11, компенсируя неточность остановки устройства 1, устанавливается по оси
стационарного стола 2 или 4. При движении штока 18 управляющие ролики 19 взаимодействуют с рабочими поверхностями 28 паза 27 копира 26 и поворачивают копиры 26 в вертикальной плоскости, через каждый вал 25 крутящий момент передается на Г-образный рычаг 23.
При повороте Г-образного рычага 23 происходит расфиксация тары 15, при этом рабочая поверхность 24 каждого рычага, выступающая за габарит каретки 11, вступает во взаимодействие с подпружиненным фиксатором 30 тары 15 и, преодолевая усилие пружины 33, утапливает его. Тара 15 с грузом передается на рольганг 14 стола 2 или 4. Выключается привод 20 механизма 16 сты
5 ковки, подвижный щток 18 с установленным на его торце роликом 17 возвращается в исходное положение.
Каждый управляющий ролик 19, взаимодействуя с рабочей поверхностью 29 копира 26, поворачивает его в вертикальной плоскости, через вал 25 происходит поворот Гобразного рычага 23 в рабочее положение. При этом освобождаются фиксаторы 30 тары 15, установленные на столе 2 или 4. Под действием пружин 33 они устанавливаются в рабочее положение, фиксируя тару 15, находящуюся на рольганге 14.
Кроме того, при выключении привода 20 механизма 16 стыковки и возвращении связанного с ним штока 18 в исходное положение ролик 17, установленный в торце штока 18, выходит из взаимодействия с Vобразным элементом 32, ограниченно подвижная каретка И под действием механизма 13 возврата в установочное положение перемещается в свое исходное положение.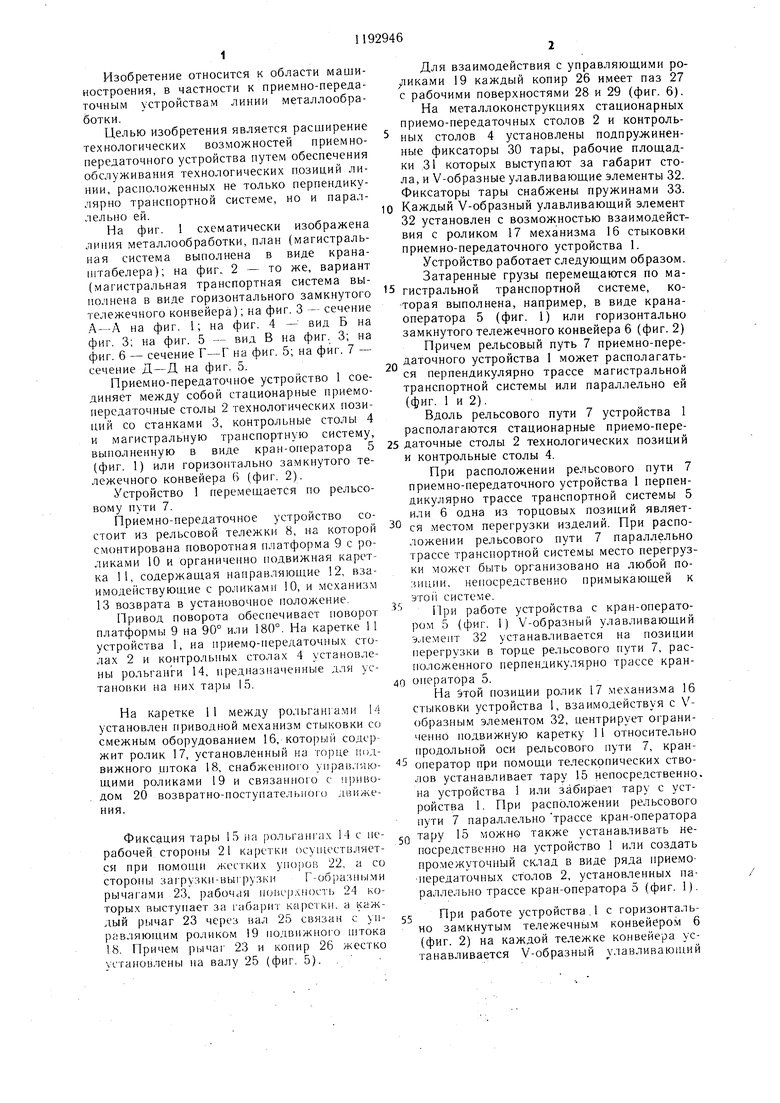
| название | год | авторы | номер документа |
|---|---|---|---|
| Приемо-передаточное устройство и транспортно-накопительная система поточной линии | 1983 |
|
SU1180232A1 |
| Устройство для транспортировки и поворота изделий в поточной линии | 1981 |
|
SU995439A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Тележечный конвейер | 1979 |
|
SU806557A1 |
| Тележечный конвейер | 1984 |
|
SU1263587A1 |
| Цепной тележечный конвейер | 1977 |
|
SU745812A1 |
| Установка для перемещения керамических отформованных изделий | 1990 |
|
SU1791136A1 |
| ГОРИЗОНТАЛЬНО ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1991 |
|
RU2013330C1 |
| Распределительный тележечный конвейер | 1990 |
|
SU1770230A1 |
| Горизонтально-замкнутый тележечный конвейер | 1982 |
|
SU1060407A1 |
ПРИЕМНО-ПЕРЕДАТОЧНОЕ УСТРОЙСТВО ДЛЯ ЛИНИИ МЕТАЛЛООБРАБОТКИ, выполненное в виде рельсовой тележки, содержащей поворотную платформу, на которой установлена подвижная каретка с элементами фиксации тары и механизмом стыковки с V-образными элементами смежного оборудования, отличающееся тем, что, с целью расширения технологических возможностей, механизм стыковки выполнен в виде установленного с возможностью возвратно-поступательного перемещения штока, снабженного направляющим роликом и роликами, управляющими элементами фиксации тары, при этом элементы фиксации тары выполнены в виде установленных с возможностью совместного поворота Г-образных рычагов и копиров, в которых имеются продольные пазы, причем ролики, управляющие элементами фиксации тары, расположены с возможностью взаимодействия с пазами копиров, а направляющий ролик - с V-образным элементом смежного оборудования. со IsD СО 4 05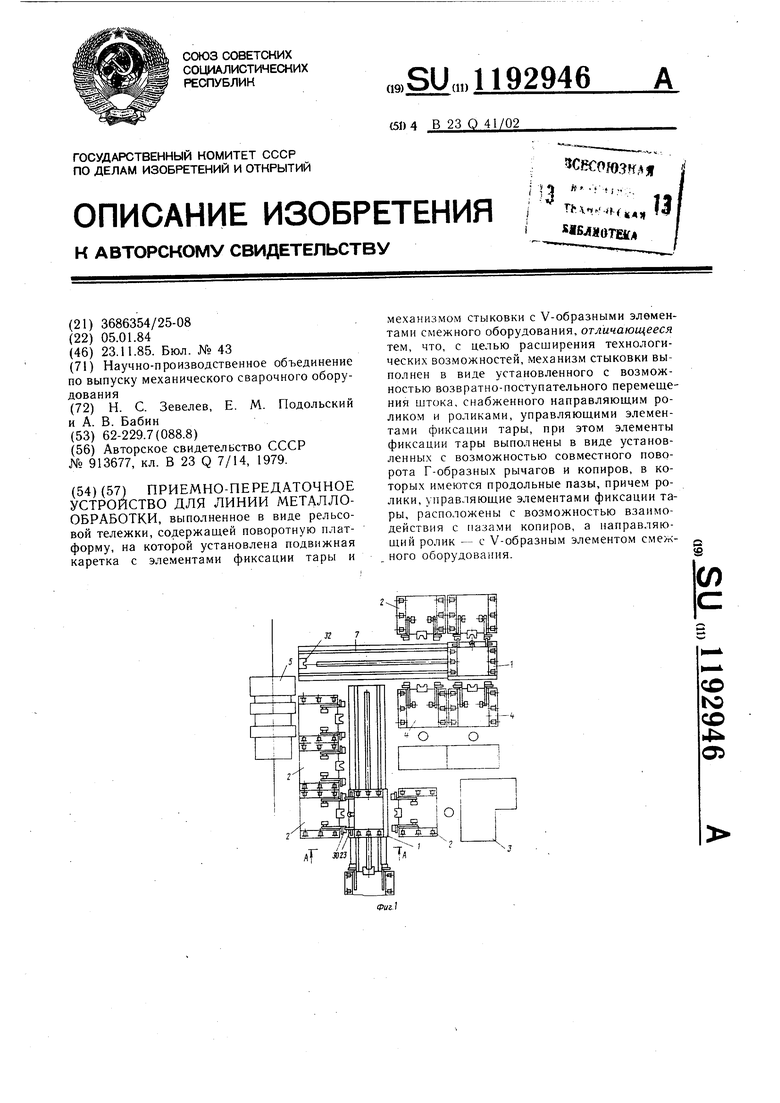
| Авторское свидетельство СССР № 913677, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
