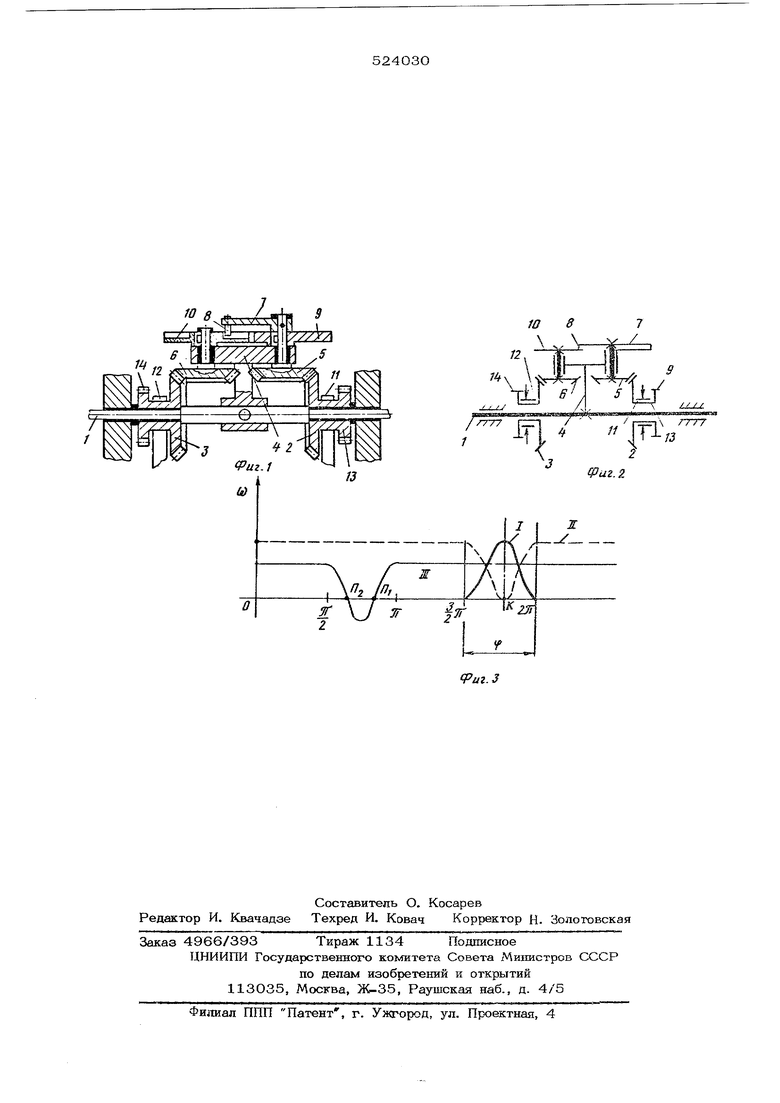
(54) ПЛАНЕТАРНЫЙ МЕХАНИЗМ го ром 9. Ролик 3 и сектор 9 кривошипа 7 поочередно могут сопрягаться соответхзтвенно с пазами и дугами мальтийского креста 10, жестко закрепленного на валу сателлита 6. На ступицах центральных колес 2 и 3 расположены тормозные устройста 11 и 12, под действием которлх центральные колеса 2 и 3 могут поочередно стопориться На ступицах центральных колес 2 и 3 выполнены зубчатые венцы 13 и 14 для подвода или снятия вращения. Механизм работает следующим образом. Возможны два режима работы. Первый режим. Центральное колесо 3 заторможено при помощи тормозного устройства 12, центральное колесо 2 свободно и на него подается вращение с пос тоянной по величине и направлению скороотью. Сателлит 5, взаимодействующий с центральным колесом 2, получает от последнее го вращение, это же вращение получают кри вощйп 7 с роликом 8 и запирающим сектором 9, Так как при этом ролик 8 кривошипа 7 периодически входит в сопряжение с пазами мальтийского креста 10 и поворачивает его на определенный угол f (фиг. 3, кривая I) со скоростью, определяемой законом движения мальтийского креста, в тот же период. 2 ЛГ - f - сателлит 6 обкатыва ет заторможенное центральное колесо 3, пе давая вращение водилу 4. Как только ролик 8 выйдет из паза мальтийского креста 10, запирающий сектор 9 входит в соответствующую дугу на мальтийском кресте 1О и скользит по ней, пока ролик 8 вновь не вой дет в следующий паз мальтийского креста 1О. Весь этот период 23С - (фиг. 3, кривая I) мальтийский крест 10, сателлит 6 ;i водило 4 леподвижны. Далее цикл повторя ется, преобразуя равномерное вращение во вращение с периодическими остановками. Второй режим. Центральное колесо 2 неподвижно, центральное колесо 3свободно и с него снимается вращение. Равномерное вращение подается на водило 4через ось 1. Сателлит 5, обкатываясь по неподвижному центральному колесу 2, передает равномерное вращение кривощипу 7 с роликом 8 и запирающим сек тором 9. На периоде 2Jt- Ч (фиг. 3, кривая И ), когда запирающий сектор 9 сопряжен с дутой креста 1О (крест Юисателлит 6 неподвижны относительно своей оси), колесу 3 передается вращение, равное оборотам входного щ, вала. В этот период сателлит б и колесо 3 работают как зубчатая муфта. Как только сектор 9 освободит крест 10, ролик 8 войдет в паз креста 10 и начнет его, а вместе с ним и сателлит 6 проворачивать со скоростью, определяющейся законом движения мальтийского механизма. А так как направление вращения сателлита 6 при этом противоположно направлению вращения входного вала, тост вели чины последнего будет вы читаться величина вращательного движения сателлита 6 (фиг. 3, кривая II , период Р), т. е, будет иметь место периодическое понижение скорости вращения ведомого звена по закону, являющемуся зеркальным отображением закона движения (первый режим работы). При оборотах входного вала, равных по величине для обоих режимов работы, во втором режиме имеет место понижение скорооги с моментальной остановкой (фиг. 3, Л , точка К). Применяя мальтийские кресты с различным количеством радиальных пазов, можно сдвигать по времени начало остановок (или понижения скорости вращения) ведомого звена (фиг. 3, кривая Iff ), а подавая различное по величине вра щения входного вала, можно получать (во втором режиме) вращение с моментальным реверсом (фиг. 3, кривая Ш , точки П; ГЦ)Формула изобретени Планетарный механизм, содержащий ось, два центральных колеса, водило, жестко закрепленное на этой оси, сателлитный блок из двух сателлитов, каждый из которых взаимодействует с одним из центральных колес, отличающийся тем, что, с целью расщирения кинематических возможностей механизма, он снабжен кинематической цепью, замыкающей сателлиты, выполненной в виде механической передачи, например, механизма в виде мальтийского креста, и тормозными устройствами для торможения . Источники информации, принятьте во внимание при экспертизе: 1.Кожевников С. Н. и др. Элементы механизмов, 1956 г., стр. 5О5, фиг. 1571. 2.Заявка № 194413О/28, по которой принято решение о выдаче авторского сви- детельства (прототип). W
fpui.S ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарный механизм | 1975 |
|
SU543799A2 |
| Мальтийско-планетарное устройство | 1975 |
|
SU587288A1 |
| Фрезерный станок | 1980 |
|
SU952469A1 |
| Механизм прерывистого движения | 1980 |
|
SU949261A1 |
| ВЕТРОДВИГАТЕЛЬ | 1994 |
|
RU2106525C1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР | 1999 |
|
RU2153613C1 |
| ЗУБЧАТЫЙ ПЛАНЕТАРНЫЙ МЕХАНИЗМ С ПРЕРЫВИСТЫМ ДВИЖЕНИЕМ ВЕДОМОГО ЗВЕНА | 2005 |
|
RU2293234C1 |
| Зубчато-кулачковый механизм | 1979 |
|
SU922363A1 |
| Планетарно-кривошипный механизм возвратно-поступательного движения | 1983 |
|
SU1130711A1 |