Изобретение относится к области машиностроения, к подшипникам для роторных машин и предусматривает усовершенствование системы автоматического управления (САУ) магнитных активных подшипников (МАП).
При создании роторных машин с активными1 магнитными подшипниками возникает проблема устойчивой работы последних, которая обычно решается выбором элементов внешней САУ МАП.
Известные из указанных источников технические решения обеспечивают надежную работу роторной машины при высоких оборотах, в ШИРОКОМ диапазоне температур. Наличие автоматической системы управления позволяет дополнительно устранить разбалансировку демпфировать
колебания подвески, устранить расцентров- ку опор.
Однако известные технические решения имеют сложную конструкцию подшипниковых узлов, качество регулирования. САУ МАП не всегда обеспечивают надежную работу ротора машин.
Для повышения качества регулирования величину тока питания электромагнитов подшипника корректируют по величине перемещения и скорости перемещения контролируемого сечения ротора.
Однако из-за наличия в выходном сигнале преобразователя перемещений остатков несущей частоты и других высокочастотных шумов ухудшаются динамические характеристики всей системы. Введение дополнительного датчика скорости перемещения ротора улучшит динамическую характеристику, но приведет к заметному увеличению размеров подшипникового узла.
Приведенная в известном устройстве система для стабилизации магнитного подвеса содержит ротор, магнитные активные подшипники, снабженные индуктивными датчиками положения ротора, выполненными по схеме измерительного моста, источники электропитания, а также блоки системы автоматического управления, включающие задающее устройство, сумматор, усилители, включенные в цепь силового электромагнита подшипника, и преобразователь, обрабатывающий сигнал датчика положения и состоящий из установленных последовательно дифференциального усилителя, фазочувствительного детектора, фильтра низкой частоты, а также корректирующего звена (дифференциатора), с помощью которого получают величину скорости перемещения сечения ротора.
Принятый за прототип объект не всегда обеспечивает необходимое качество регулирования из-за ограничений, накладываемых на значение коэффициента преобразования дифференциатора, что снижает надежность работы ротора. ,dUBX
KI - UBUX/dt
Из приведенной формулы видно, что предельное значение определяется отношением допустимой величины напряжения шумов на выходе дифференциатора и максимальной скоростью изменения шумового сигнала на его входе.
Характеристическое уравнение простейшей САУ МАП имеет вид
Тэ р3 + р2 + Кfj р + К О, где Тэ - постоянная времени электромагнита;
К, К , - коэффициенты передачи САУ МАП по отклонению и скорости соответственно;
р - оператор дифференцирования.
Величина К определяется необходимой жесткостью подвеса, а условие К К-ТЭ обеспечивает устойчивость системы. Таким образом, ограничения на величину Ki К, существенно влияют на характеристики подвеса,
В известных технических решениях в качестве входного сигнала дифференциатора используют выходной сигнал преобразователя перемещений. Однако высокочастотные шумы ухудшают динамические характеристики всей системы, что снижает надежность работы ротора, а введение дополнительного датчика скорости перемещения ротора усложняет конструкцию подшипникового узла.
Для достижения поставленной цели в
устройстве для стабилизации магнитного подвеса ротора, содержащем магнитные активные подшипники, снабженные индуктивными датчиками положения ротора, соединенными по схеме измерительного
моста и с предварительным усилителем, усилитель мощности, включенный в цепь силовых электромагнитов подшипника, генератор переменных сигналов, фазочувст- вительный детектор и последовательно
соединенный с ним фильтр низкой частоты, один из узлов питающей диагонали измерительного моста подключен к источнику постоянного напряжения, а другой узел - к генератору переменных сигналов, второй
выход которого соединен с первым входом фазочувствительного детектора, вторым входом соединенного с выходом предварительного усилителя и вторым входом фильтра низкой частоты, выход которого связан с
входом усилителя мощности.
Отличительные особенности устройства предлагаемой системы для стабилизации магнитного подвеса ротора по существу заключаются в новых связях известных элементов, а именно в измерительном мосте датчика положения один из узлов питающей диагонали подключен к источнику постоянного напряжения, а выход дифференциального усилителя преобразователя
дополнительно, минуя фазочувствительный детектор, подключен на вход фильтра низкой частоты.
Подключение напряжения к узлу питающей диагонали измерительного моста
создает разность потенциалов, обусловливающую протекание через катушки датчика постоянного тока.
На вход фильтра приходит сигнал, пропорциональный скорости перемещения ротора, а также сигнал, пропорциональный отклонению ротора от заданного положения, получаемый при детектировании.
Таким образом, благодаря указанным отличительным особенностям схемы, в которой используют величину магнитного потока в цепи датчика, в отличие от схемы, приведенной в качестве прототипа, в которой использу эт корректирующее звено, упрощается конструкция САУ МАП.
Качество регулирования при использовании заяеляемого устройства стабилизации повышается, что повышает надежность работы магнитного подвеса а предлагаемая схема системы упрощает конструкцию подшипникового узла и в свою очередь дополнительно повышает надежность работы.
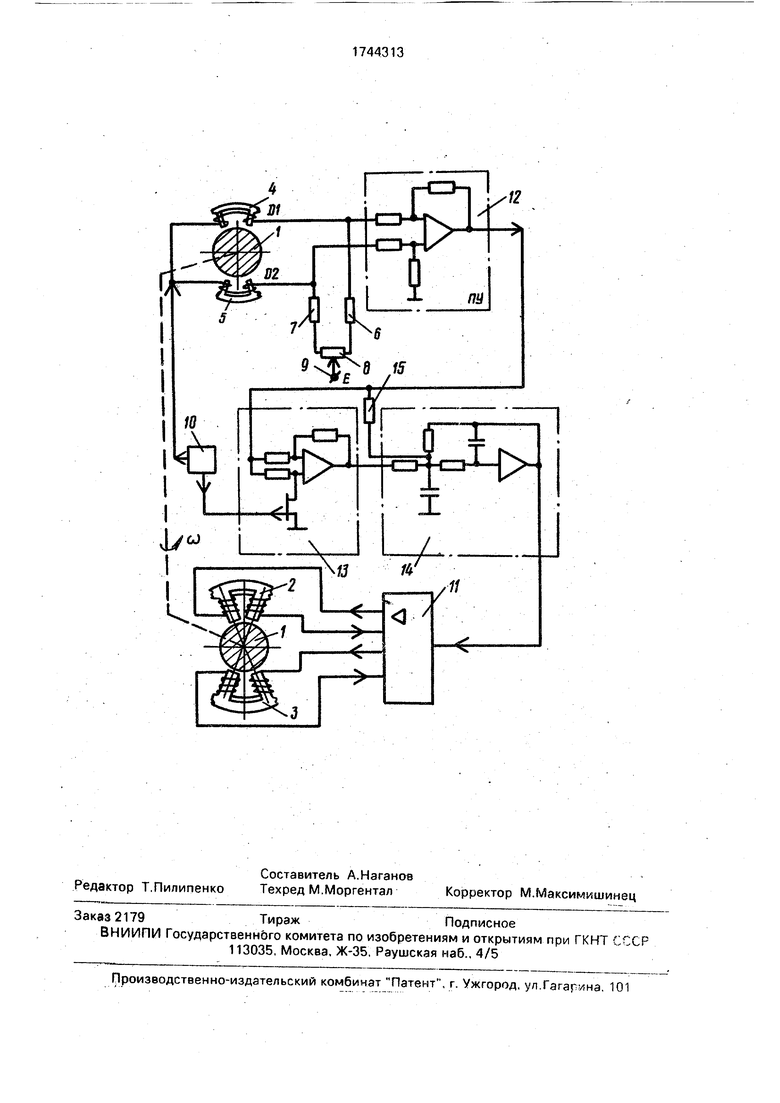
На чертеже изображена принципиальная схема заявляемого устройства для стабилизации магнитного подвеса ротора (один канал). Ротор изображен условно двумя заштрихованными сечениями, соединенными пунктирной линией с обозначением онугловой скорости вращения, Кроме того, основные функциональные блоки системы обозначены позициями: 1 - ротор; 2, 3 - электромагниты подвеса ЭМ1 и ЭМ2; 4, 5 - индуктивные датчики положения Д1 и Д2; 6, 7 -.резисторы, образующие с обмотками датчиков 4 и 5 измерительный мост; 8 - узел питающей диагонали измерительного моста; 9 - клемма источника напряжения постоянного тока Е; 10 - генератор переменных сигналов ГПС; 11 - усилитель мощности - УМ; 12 - предварительный усилитель - ПУ;
13- фазочувствительный детектор - ФЧД;
14- фильтр низкой частоты - ФНЧ; 15 - дополнительный резистор.
Заявляемое устройство работает следующим образом.
Сигнал от ГПС-10 подают на измерительный мост, образованным индуктивно- стями катушек датчиков 4, 5 и резисторами 6, 7. С измерительной диагонзои моста напряжение разбаланса, вызванное смещени- ем ротора 1 через усилитель 12 поступает на фазочувствительный детектор 13, где выделяется информация о величине и направлении разбаланса. Подключение клеммы 9 к источнику напряжения постоянного тока приводит к появлению дополнительного магнитного потока Ф0 от постоянного тока, благодаря чему в мндуктивностях датчиков 4, 5 наводится дополнительная ЭДС Ь с1Ф0/сК - или е х (х - величина скорости смещения ротора). Этот сигнал с выхода усилителя 12 через резистор подают в обход ФЧД 13 на вход в ФНЧ 14. При достаточно большом Фо сигнал, пропорциональный х, намного превышает шумовой сигнал, идущий от ФЧД 13. В результате на выходе ФНЧ 14 формируется сигнал + Кх, т.е. сигнал, пропорциональный перемещению и скорости перемещения контролируемого датчиками 4, 5 сечения ротора 1. Этот сигнал является управляющим для усилителей 11 и регулирует величину электрического тока питания электромагнитов 2 иЗ, что соответственно приводит к корректировке величины передаваемых от электро- магнитов на ротор 1 усилий и стабмпизирует его магнитный подвес. При этом непосредственное получение первой производной от перемещения ротора характеризуется значительным (по 2-х порядков) улучшением соотношения сигнал/шум по сравнению с прототипом, где производная вычисляется путем дифференцирования сигнала от измерителя положения ротора с помощью корректирующего звена. Это позволяет уйти от ограничений, в значениях К g конкретной схемы САУ, накладываемых высокочастотным шумом на входе дифференцирующего звена, получить в характеристическом уравнении
Тэ- p3 + p2-f-IU р + К 0 лучшую устойчивость системы, определяемую соотношением KV дает возможность увеличивать значение К и Тэ и ведет к улучшению основных эксплуатационных характеристик подвеса.
В сравнении с прототипом заявляемая схема САУ МАП имеет следующие технико- экономические преимущества.
Благодаря принципиальной возможности получения более высоких значений К заявляемая система обладает лучшей устойчивостью; позволяет повысить эксплуатационные характеристики магнитного подвеса При этом несколько проще схема, не критична к настройке, так как не содержит сложных цепей коррекции амплитудно-фа- зо-частотной характеристики (АФЧХ).
Экономический эффект от использования заявляемого изобретения можно будет определить после его промышленного применения как .экономию от повышения надежное ги роторной машины.
Формула изобретения
Устройство для стабилизации магнитного подвеса ротора, содержащее магнитные активные подшипники, снабженные индуктивными датчиками положения ротора, соединенными по схеме измерительного моста и с предварительным усилителем, усилитель мощности, включенный в цепь питания силовых электромагнитов подшипника, генератор, фазочувствительный детектор и последовательно соединенный с ним фильтр низкой частоты, отличающееся тем, что, с целью повышения надежности работы за счет улучшения качества регулирования питающего тока электромагнитов подшипника, один из узлов питающей диагонали измерительного моста подключен к источнику постоянного напряжения, а другой узел - к генератору, второй выход которого соединен с первым входом фазочувствительного детектора, первым входом соединенного с выходом предварительного усилителя и вторым входом фильтра низкой частоты, выход которого связан с входом усилителя мощности.
12


| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкомпонентные магнитоэлектрические весы | 1975 |
|
SU524977A1 |
| Радиальная электромагнитная опора для активного магнитного подшипника | 2021 |
|
RU2763352C1 |
| СОВМЕЩЕННЫЙ ДАТЧИК МОМЕНТА И СМЕЩЕНИЯ ТЕЛА | 1998 |
|
RU2209393C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2007 |
|
RU2345464C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2215357C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ ОТКЛОНЕНИЯ РОТОРА В СИСТЕМАХ МАГНИТНОГО ПОДВЕСА РОТОРНЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2012 |
|
RU2507420C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ДИЭЛЕКТРИЧЕСКОГО ВЕЩЕСТВА | 2009 |
|
RU2397454C1 |
| ЭЛЕКТРОГРАВИРОВАЛЬНАЯ МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ РЕЛЬЕФНЫХ ПЕЧАТНЫХ ФОРМ | 1956 |
|
SU112764A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2008 |
|
RU2375736C1 |
Использование: в области машиностроения, в частности, в конструкциях подшипниковых узлов, и может быть использовано в быстровращающихся роторных машинах с активными магнитными подшипниками. Сущность изобретения: устройство содержит индуктивный датчик положения ротора, связанный с последовательно соединенными предварительным усилителем, фазочув- ствительным детектором, фильтром низкой .частоты, усилителем мощности и обмотками питания электромагнитов, а также генератор переменных сигналов. За счет питания измерительного моста, образованного датчиками положения ротора, как от генератора переменных сигналов, так и от источника постоянного тока создается в магнитной цепи датчика дополнительный магнитный поток и выделяется сигнал, обусловленный скоростью изменения магнитного потока, что позволяет упростить конструкцию подшипникового узла и повысить эксплуатационную характеристику магнитного подвеса 1 ил.
| Отчет Разработка и исследование электромагнитных подшипников | |||
| Псковский филиал Л ПИ им, М.И.Калинина | |||
| Псков, 1981, № Гос | |||
| регистр 79012472 | |||
| инв | |||
| Подпалубное люковое закрытие | 1981 |
|
SU986819A1 |
