(54) СЛЕДЯЩАЯ СИСТЕМА С НЕЛИНЕЙНОЙ КОРРЕКЦИЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННЫХ СЛЕДЯЩИХ СИСТЕМ | 1995 |
|
RU2093850C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ ИЗЛУЧЕНИЕМ | 2017 |
|
RU2692238C2 |
| Устройство разделения сигналов яркости и цветности в декодере системы СЕКАМ | 1991 |
|
SU1807584A1 |
| Электромеханический следящий привод постоянного тока | 1989 |
|
SU1640668A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| Следящая система | 1981 |
|
SU962847A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
1
Т1эобретение относится к электрическим ; регулирующим и управляющим системам общего назначения, работающим 6 различНых режимах. ; Известны системы управления с нелиней|ной коррекцией, в которых улучшение ка |чества регулирования и, в частности, опти|мизации переходного процесса в режиме |синхронизации достигается изменением.; коэф фйциента1 передачи прямого канала систе:мы. Например, известна система, в которой коэффициент передачи меняется по доволь:но сложному закону в зависимости от сиг-. :налов на входе, выходе и ошибки системы, а также их производных 1. Известна сие- тема, в которой закон управления коэффи- ; циентом передачи содержит модуль сиг;на.па ошибки и модуль суммы первой и второй производных выходной величины 2. Система с нелинейной коррекцией характери зуется низкой надежностью и помехоустойчивостью, вследствие сложности техничес- ;КОй реализации закона управления и необходимости получения первых и вторых произ.. Наиболее близкой к изобретению
является система, содержащая последова(тельно соединенные датчик, приемник, блок нелинейной коррекции, усилитель и двига|тель, выход которого через jpeHyKTopi, подI соединен ко второму входу приемника 1з| В этой системеIкоэффициент передачи меняется с помошью реле, на обмотки которого через добавочный усилитель подаетсвг сигнал рассогласования (ошибки) системы. Однако низкая эффективность коррекции сис«темы не действует при рассогласованиях, не выходящих за зону, соответствующую напряжению срабатывания реле, что затягивает переходной процесс.
Целью изобретения являются; повышение ; помехозащищенности и надежности системы IB описываемой системе это достигается тем, что в нее введено устройство времен.:ной задержки, вход которого подключен к выходу; усилителя, а выход - к дополнител ному входу блока нелш1еШ40й кгоррекции.
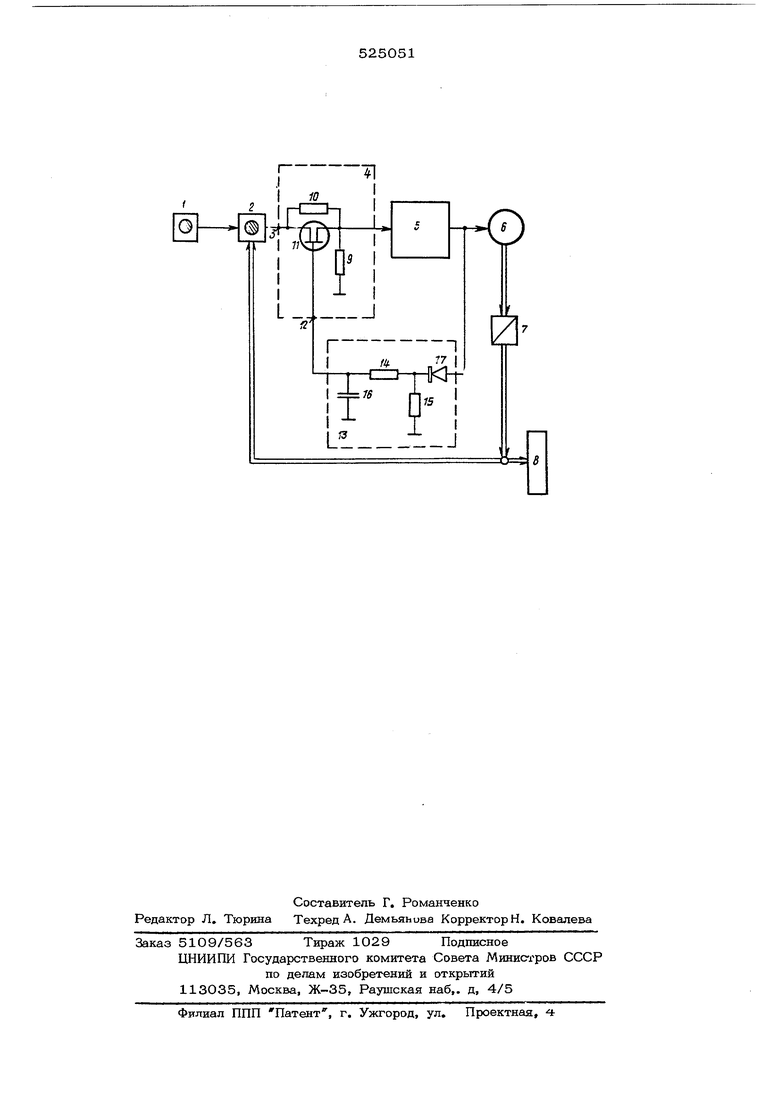
На чертеже изображена блок-схема опи сываемой системы,
Она содержит . датчик 1, приемник 2, Bbt |ход которого подключен через первый вход 3 блока нелинейной коррекщ1И 4 ко входу усилителя 5, соединенному с двигателем 6. Выходной вал двигателя 6 через редуктор 7 связан с валом управляемого объекта 8 и вторым входом приемника 2. Блок неЛ1шейной коррекции 4 имеет переменный коэффициент передачи и может быть выпол нен, например, в виде делителя на сопроти лениях 9 и 10, зашунтированного, например, полевым транзистором 11, затвор которого подключен к управляющему входу 12 блока нелинейной коррекции 4, соединенному через устройство временной задержки 13 с выходом усилителя 5. Устройство временной задержки 13 может быть выполнено, например, в виде 1 С-цепи на сопротивлениях 14 и 15, конденсаторе 16и диоде 17. Подбором сопротивлений 14 и 15 обеспечивается различное время заряда и разряда конденсатора 16. Диод 17применяется, если выход усилителяна переменном токе. Если выход усилите- ля-на постоянном токе, то вместо диода 17 может быть применен, например, выпря мительный мост или другое устройство служащее для получения модуля сигнала с выхода усилителя. При работе в режиме слежения ошибка системы мала, напряжение на выходе усилителя 5 невелико и напряжение на затвор транзистора 11 недостаточно для его закрытия. При этом сопротивление открытого полевого транзистора 11 мало, коэффициен передачи блока нелинейной коррекции 4 бли зок к единице и добротность следящей сиетемы максимальна. При работе в режиме синхронизации (отработки больших начальных углов рассогласования) ощибка систем резко возрастает, что приводит к увеличению выходного напряжения усилителя 5 и закрытию транзистора 11. В этом случае коэффициент передачи бл ка 4 практически определяется соотнощени сопротивлений 9 и 10, которые выбираютс так, чтобы значительно уменьшить коэффициент передачи, а следовательно, и добротность системы. При подходе управляемого объекта 8 к новому согласованному положению ошибка системы стремится к нулю, но напряжение на затворе транзистора 11 уменьишется с некоторым отставанием по времени, определяемым временем задержки устройства 13, зависящим, например, от времени разряда RC-цепи 14, 15 и 16. Таким образом, при подходе управляемого объекта к согласованному положению, а также в течение некоторого определенного времении, после согласования, в системе сохраняется малый коэффициент передачи, что гарантирует быстрое затухание переходного процесса. В качестве блока нелинейной коррекции 4 может быть использовано любое другое устройство с переменным коэффициентом передачи, а устройство временной задержки 13 мо жет быть подключено не только к выходу всего усилителя 5, но и к одному из его предварительных каскадов. Применение описываемой системы обеспечивает значительное улучшение переходного процесса. Формула изобретения Следящая система с нелинейной коррекцией, содержащая последовательно соединенные датчик, приемник, блок нелинейной коррекции, усилитель и двигатель, выход которого через редуктор подсоединен ко второму входу приемника , отличающаяся тем, что, с целью повышения надежности системы, в нее введено устройство временной задержки, вход которого подключен к выходу усилителя, а выход - к дополнительному входу блока нелинейной коррекции. Источники информации, принятые во внимание при экспертизе: 1. Нелинейные корректирующие устройства в системах автоматического управления. Под ред. Ю. И.Топчеева. М., Мащиностроение,1971, с. 32-37. 2.Авт св. СССР № 150901, М. Кл. & О5 В 5/01, 1961. 3.Честнат Г. и Майер Р. Проектирование и расчет следящих систем и систем регулирования. М.-Л., Госэнергоиздат, 1959, ч. И, с. 370.
