третьим управлякзщим выходом устройству, : третьими входами блока b i KponporpaMMiiOro прерывания и блока задания адреса канала, с четвертым управляющим входом коммутатора информации и с первым входом блока анализа, состояния какала, вторые, третьи и четвертые входы блоков анализа состояния канала и выбора фежима работы канала со единены соответственно со вторым, третьим и первым управляющим входами устройства, выход блока анализа состояния канала подключен к четвертому входу блока микропро граммного прерывания и четвертому управлякяцему выходу устройства.
Селекторные ганалы, подключенные к устройству для управления каналами, имеют одинаковую структуру и управляются общими для обоих каналов микропрограммами. Это позволяет упрашипощей программе организо вать работу с внешним устройством неисправ- 20
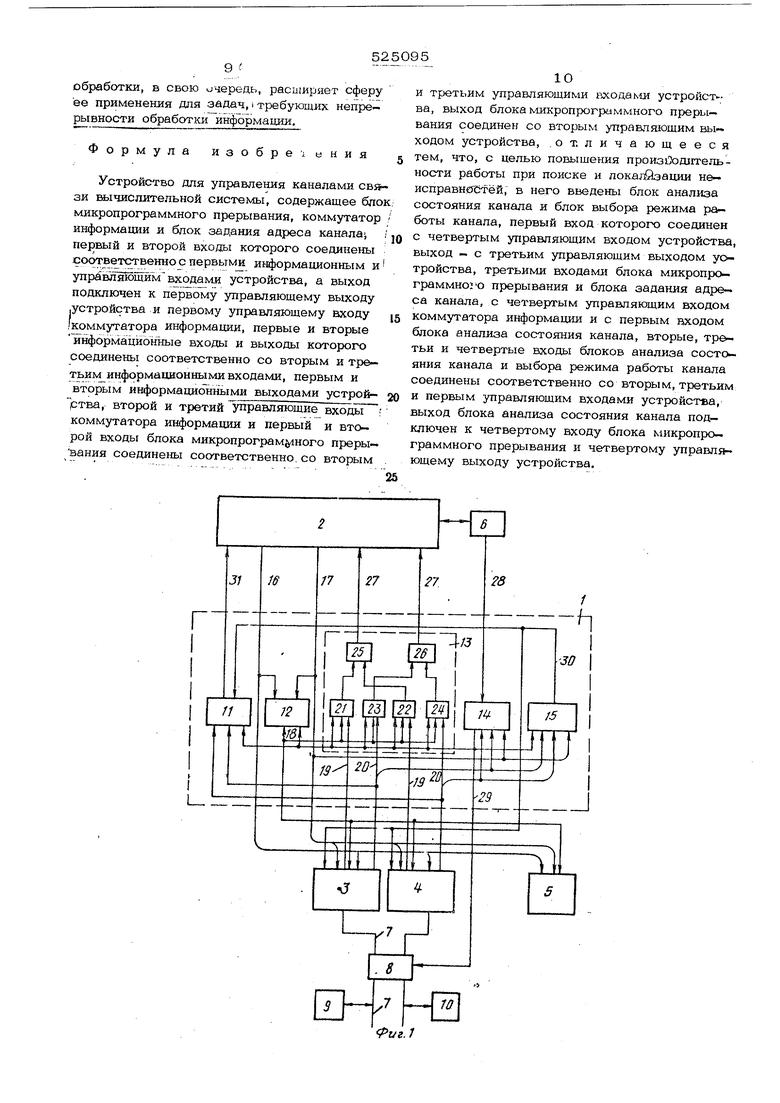
ного селекторного канала, используя исправный селекторный канал, в то время, когда он не занят работой со своим внешним yciw ройством. Блок выбора режимй работы канала переводит неисправный канал в режим поиска и локализации неисправности. Сигналы, вырабатываемые в этом случае, в блоке выбора режима работы канала, блокируют цепи выдачи сигналов неисправного канала. В результате неисправный канал может только принимать информацию из устройства для управления каналами и внешнего устройства. Аппаратура обоих каналов работает синхронно, так как подвержена одинаковым воздей- отвиям как со стороны устройства для управ ления каналами так и со стророны внешнего устройства. С помощью блока анализа состояния , канала производится сравнение реакций обоих каналов и предоставление информации процессору о состо5ШИ1 аппаратуры неисправ ного канала в момент боя, На фиг. 1 показана блок-схема предлагаемого устройства и его связи с другими устройствами вычислительной системы; на фиг. 2 схема блока выбора режима работы канала; на фиг. 3 - схема блока анализа состояния канала. Устройство 1 для управления каналами, представленное на фиг. 1, предназначено для подключения к процессору 2 первого и втоpord селекторных каналов 3 и 4 соответственно и мульт1П1лексного канала 5, и управления передачей т1равляющей информации и данными между каналами и процессором. Процессор 2 управляет работой системы в целом, выполняет функции хранения, обработки и организации передачи информации. Пульт 6 управления системой предназначен для ручного управления работой системы,
осушествления визуального :онтроля. и прове-,-, дешш профилактических работ.,
Селекторные каналы 3 и 4 предназначены для подключения внешних устройств, содеркат необходимые регистры для хранения управляющей ннформахши, которая .зуется для организации и поддержания вводавывода.
К селекторным каналам 3 и 4 посредстBOM интерфейса 7 ввода-вывода и коммутатора 8 интерфейса подключаются внешние устройства 9 и 1О соответственно.
Устройство 1 содержит блок 11 микропрограммного прерывания блок 12 задания адреса .канала, коммутатор 13 информации, блок 14 выбора режима работы канала и блок 15 анализа состояния канала.
Обмен информацией между внешними уст ройствами 9 и 10 и процессором 2 являет-
которой используется устройство 1 для управления каналами. Обмен информа1дией осуществляется по командам от процессора, в которых указывается номер канала и вн&26 шнего устройства. Код команды ввода-вывода, начальнь й адрес памяти, счетчик байтов данных, передаваемых по этой команде и другую управляюшую информацию, процессор выдает при помоши специальных управляющи
30 слов. Из принятой информации формируется ртравляюшее слово канала, содержащее необходимую для выполнения операции вводавывода информацию, и хранит его в своих регистрах/ или в специальных областях па- ся одной из основных функций системы, в мяти процессора. Передача управляющей информации между процессором 2 и регистрами каналов производится через систему выходных информационных шин 16 и управ яяюших шин 17 процессора. Признак канала, в регистры которого передается управляющая информация, вырабатывается блоком 12 И через шины 18 признаков каналавы дается в каналы. Содержимое регистров каналов может быть микропрограммно . проанализи ровано через выходные информаплонные шины I 19 каналов,, шины 2О состояния каналов, через элементы И 21, 22 (23, ,24), ИЛИ 25- (2.6) коммутатора 13 информации и систему входных информациош1ьп и управляюших шин 27 процессора.: При обнаружении сбоя в оборудовании ка- . нала неисправный канал исключается, из ра.боты и переводится в режил- поиска и локализации неисправности. Необходимость исклю. чения канала из рабочего режима может опре-деляться оператором или утгравлякщтй про граммойясупервизором) и сообщаться через выводное (пультовое) устройство. (Итератор, получив указание переключить ие1тспг)пвиын I
канал в режим койска я докализации неисправности, устанавпЕзайт на пульте 6 управ- пенйк режим исключения неисправного канала, при этом через шжгы 28 управления выдается сигнал, который поступает в блок 14 , выбора .режима работы канала. По сигналу сбоя одного из каналов и синапу от пульта 6/ -/правления в блоке 14 выбора режима рабоы гы канала формируется сигнал блокировки, который через шилы 29 блокировки и управ- j лещгя коммзггалшзй поступает в коммутатор i 13 информацШГи й:с..1мутатор 8 интерфейса. Этим Сигналом осуществляется блокировка ; выдачи 1шформации йз неисправного канала, / После этого система обработки может про- jg должить свою работу. Когда в процессе вы- полнения текущей программь встречается команда обращения к внешнему устройству 9 (ю), процессор 2 перед ее выполнением анализирует состояние канала и, если канал 20 неисправен, корректирует адрес канала в бпоке 12 задания адреса канала (заменяет его на адрес исправного канала, но при этом в выполняемой пpoгpaм ffi адрес канала 38 изменяется), после чего блок 14 выбора 25 режима работы канала вырабатывает сигнал коммутации интерфейса (если исправный каг.ая свободен), поступакадий на шины 29 олохировки и управления коммутацией. По .этому сигналу в коммутаторе 8 интерфейса 30 оисходит под.тшючение внешнего устройства :ясправного канала к исправному каналу, а r.aiacra подключение блока 15 анализа состояния канала к шинам 20 состояния канала. Одновременно в блоке 14 выбора режима 35 работы канала вырабатывается сигнал, который через шины 29 блокировки и управления ;чсмму.1ацией в блок 12 задания граса канала. По этому сигналу в блоке 12 вырабатывается сигнал разрешения приема 40 информации в регистры неисправного канала. Разрешение занесения информации в исправный канал осуществляется сигналом признака работы канала, выдаваемого блоком 12 |Через шины 1S признаков канала. Процессор 45 2, выполняя загрузку управляющей информаяжи Б регистры исправного канала, загружает
Ш 5Е§М2 112 1 5-Л 1:11 Р55 уй канал. После загруз1 и управляющей информации в регистры каналов оба канала выполняют одну и 50 ту йе операцию ввода Вывода; функцию упра&пения внешним устройством 9 (ю) неиспра&;ного канала выполняет исправный канал. От- зетные сигналы от внешнего устройства 9 (ю) через шины интерфейса 7 и коммута - 55 гор 8 ннтерфэйса поступают в оба селекторньзх канала 3 и 4„ Таким образом аппаратура ободх каналов работает синхронно, так как подвергается оД1тааковым воздействиям как
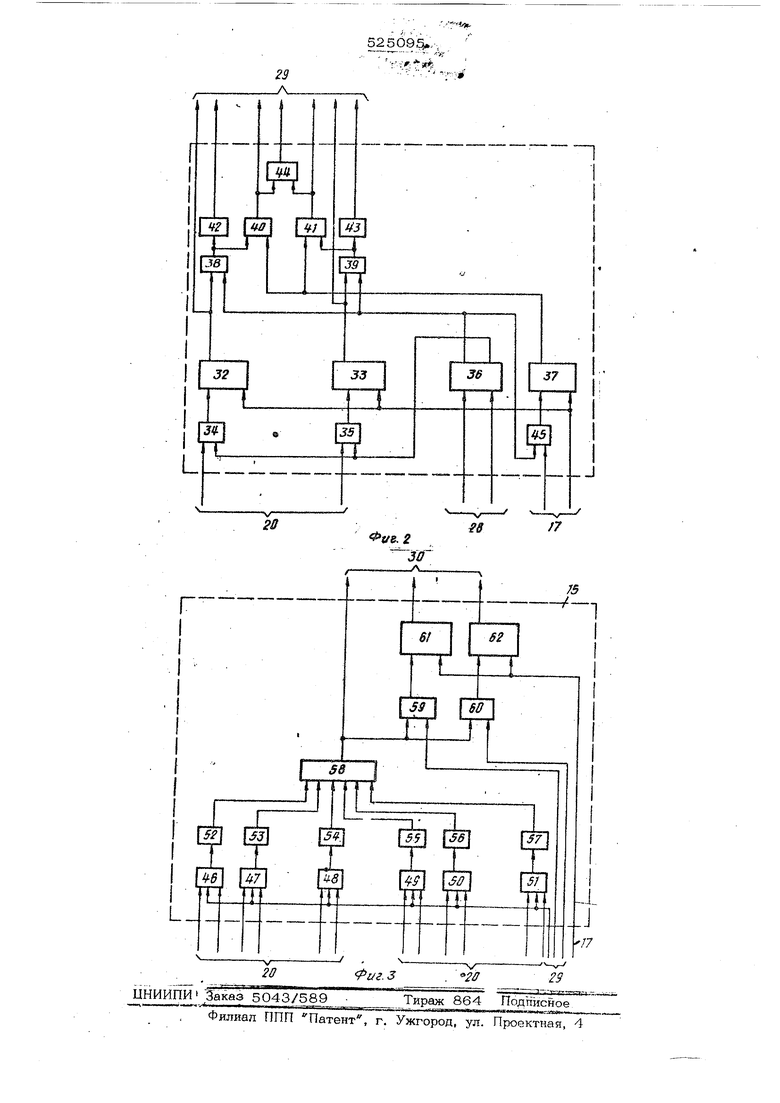
,со стороны устройства 1 для управления ка налами, ак и со стороны внешнего устро, ства 9 (ю). Ход выполнения операции ввода-вывода в неисправном канале анализируется с помощью блока 15 анализа состояния канала и останова. Через шины 20 состояния каналов в блок 15 анализа-состояния канала выдаются и сравниваются однотипные сигналы. Если выполнение операции вводавывода не связано с неисправным участком цепи аппаратуры, то сравниваемые сигналы, характеризукш1ие состояния каналов одинаковы для обоих каналов. Но как только вы-i полненйе операции ввода-вывода использует i ;неисправный участок аппаратуры проверяе1мого канала, эта однозначность нарушается. В блоке 15 анализа состояния канала выра- батывается сигнал несравнения состояний и сигнал блокировки работы аппаотуры неиоправного канала (т. е. цепей синхронизации), которые через шины 30 прерывания и останова поступают в блок 11 микропрограм много прерывания и в неисправный селектор ный канал 3 (4). По сигналу несравнения состояний в блоке микропрограммного преры вания вырабатывается и выдается через шину 31 прерывания в процессор 2 запрос на прерывание, по которому выполнение текущ последовательности микрокоманд приостанавIливается и управление пеоедается обслуживающей микропрограмме, которая производит запись состояния регистров исправного селе кторного канала в диагностическую область памяти процессора в качестве эталонной. По сигналу блокировки работы аппаратуры не- исправного канала в канале фиксируется состояние аппартуры, в котором она находилас в момент Обнаружения неисправности. Записав состояние регистров в диагностическую область памяти процессора, обслуживающая микропрограмма передает управление текущей (приостановленной) программе и в исправном канале продолжает выполняться one- рация ввода-вывода. После выполнения операI дни ввода-вывода канал сообщает процессору 2 об окончании работы путем установки запроса на прерывание по вводу-выводу, при этЬм формируется адрес неисправного канала кек причины прерывания. Управление передается обслуживакядей микропрограмме. Из про цзссора 2 через выходные управляющие шины, 17 процессора выдается управляющий citгнал в блок 14 выбора режима работы канала, по которому снимается сигнал блокировки. Это позволяет обслуживающей микропро- грамме через коммутатор 13 информации и систему гжодных информационных и у1трав ляющих шин 27 процессора записать состояние регистров и контрольголх точек кеисп{)а1 ного канала в память процессора. После з циси с оБтояния регистров процессор 2 выда ет|сигнал Сброса, по которому неисправный 1канал переходит в исходное состояние. Оба селекторных канала послевыполнения опера- цик ввода-вывода оказываются в том же состоянии, в котором они находились до выполнения команды обращения к внешнему устройству и готовы К; повторению процесса р диагностической же области памяти продео сора находится ин(|юрмация состояния аппаратуры исправного (эталонная) и неисправщ го канала в момент отказа. Диагностическая область анализируется управляющей программой путем сопоставления состояния аналогич ных. частей аппаратуры и как результат ана лиза процессор 2 через мультиплексный ка нал 5 выдает необходимую информацию оператору, который устраняет неисправность и задает рабочий режим каналу путем переключения на пульте 6 управления системой. Примером реализации блока 14 выбора режима можетслужить блВк, приведенна фиг. 2, который содержит первый триггер 32 сбоя, второй триггер 33 сбоя. элементы И 34, 35 установки первого и второго триггеров сбоя соответственно, триггер 36 режима (локализации), триггер 37 коммутации, эл ементы И 38-41, НЕ 42, 43, ИЛИ 44, И 45, Триггеры 32, 33-сбоя устанавливаются через элементы И 34, 35, если не установлен триггер 36 режима (локализации) по сигналу от схемы контроля. Сброс осуществляется сигналом от процессора 2, который поступает через выходные управляющие щины 17 процессора. Триггер 36 режима (локализации) устанавливается с пульта управления шины 28 управления припереводе неисправного канала в режим локализации. При возникновении неио правностя по сигналу сбоя от канала устанавливается триггер 32 (ЗЗ) сбоя. По уотановленному триггеру 32 (ЗЗ) сбоя и триггеру 36 режима (локализации) через элемент И 38 (39), элемент НЕ 42 (43) на шины блокировки и управления коммутацией выдается сигнал блокировки, который поступает в коммутатор информации и мутатор интерфейса, блокирует элементы И 20, 23 (21, 24). Триггер 37. коммута ции устанавливается через выходные у|тра&ляквдие шины 17 процессора, элемент И 45, процессором 2 перед запуском операции ввода-вывода, если триггер 36 режима установлен. По установленному триггеру 37 коммутации и триггеру 34 (35) сбоя элеMeJfT И 40 (4l) выр/абатывает сигнал коммутации интерфейса, который через щины блокировки и 5щраБлекияк(5муутацней выда ется в коммутатор )ейс«. По этому , сигналу происходит подгшючение внешнего устройства неисправного канала к исправному каналу. Через элемент ИЛИ 44 этот сигнал поступает в блок 15 анализа иостояння канала для подключения его--к шинам 2 О состояния канала. Блок аналжза состояния канала представлен на фиг. 3. Он содержит эпемеить. сравнения И 46-51, эламенты НЕ 52-57, ИЛИ 58, И 59, 6О и триггеры останова первого и второго каналов соответственно. Сигналы , поступающие из каналов через шины 2О состояния попарно сравниваются на элементах И 46-51. При яесравнении сиг «налов одной из пар на выходе элемента ИЛИ 58 вырабатывается сигнал несравнения, который через шины 30 прерывания и останова поступает в блок 11 микропрограммного прерывания для установки запроса на прерывание. Элементы И 59, 60 ут1равля от установкой трштеров 61 и 62 останова соответственно. Соответствующий триггер 61 (62) останова устанавливается по сигналу несравнения к триггеру 32 (ЗЗ) сбоя. Сигнал блокировки работы аппаратуры неисправного канала (цепей синхронизации) с единичного плеча триггера 61 (б2) останова выдается череэ щины прерывания и останова в соответствующий неисправъгый канал. По завершении исправным каналом операции ввода-вьшода и передачи управления управляющей микропрограмме, процессор 2 выдает сигнал, по ко торому сбрасывается триггер 32 (ЗЗ) сбоя и.триггер 37 коммутации (фиг. 2). Через элементы И 38 (ЗЭ), И 40 (4l) снимаются сигналы блокировки и коммутации. Через коммутатор 13 информации и систему вход ных информационных щин 27 процессора, по сдедний снимает состояние регистров неисправного канала. После записи информации о состоянии аппарат5фы канала процессор 2 через выходные управляющие щины 17 вы дает сигнал сброса, по которому сбрасывает. ся триггер 60 (б1) останова, а аппаратура неисправного канала переходлт в исходное состояние, Таким образом, устройство для управления каналами позволяет организовать поиск и локализацию неисправности в одном из селекторных каналов во время работы второго (исправного) селекторного канала, что увеличивает полезное время работы системы на величину, равную времени, затрачиваемому на поиск и локализацию нейсправностя при использовании известных усг|эойств управлония каналами в системах обработки. Увели.чение полезного времени работы системы I | обработки, в СБОЮ очередь, расишряет сферу ее применения для задач,(требующих непрерывности обработки информации, Формула изобре1ения Устройство для управления каналами свя зи вычислительной системы, содержащее бло микропрограммного прерывания, коммутатор информации и блок задания адреса канала; пе1эвый и второй входы которого соединены соответственно с первыми информационным и управляющйм входами устройства, а выход подключен к первому управляющему выходу .устройства и первому управляющему входу /коммутатора информации, первые и вторые информационные входы и выходы которого соединены соответственно со вторым и третьим информационными входами, первым и вторым информационньгми выходами устрой ртва, второй и третий управляющие входа коммутатора информации и первый и второй входы блока микропрограммного преры вания соединены соответственно, со вторым и третьшм управляющими 1жодами устройства, выход блока микропрограммного прерывания соединен со вторым управляющим вы ходом устройства, .от. ли чающееся тем, что, с целью повыщения произ :Хэдительности работы при поиске и локаШэащш неисправностей, в него введены блок анализа состояния канала к блок выбора режима работы канала, первый вход которого соединен с четвертым управляющим входом устройства, выход - с третьим управляющим выходом уотройства, третьими входами блока микропрограммно ю прерывания и блока задания адреса канала, с четвертым управляющим входом коммутатора информации и с первым входом блока анализа состояния канала, вторые, третьи и четвертые входы блоков анализа состо яния канала и выбора режима работы канала соединены соответственно со вторым, третьим и первым управляющим входами устройства, выход блока анализа состояния канала подключен к четвертому входу блока микропрограммного прерывания и четвертому управл$5еющему выходу устройства.
29 У
.-,
Т-:- - 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления каналами | 1972 |
|
SU545983A1 |
| Устройство управления каналами | 1973 |
|
SU518769A1 |
| Устройство для сопряжения электронно-вычислительной машины (ЭВМ) с внешним устройством | 1984 |
|
SU1272337A1 |
| Комбинированный канал | 1986 |
|
SU1405067A1 |
| Устройство для сопряжения оперативной памяти с внешними устройствами | 1981 |
|
SU993237A1 |
| Устройство для управления каналами | 1974 |
|
SU520592A1 |
| Устройство для управления каналами | 1976 |
|
SU641436A1 |
| Устройство для управления диагностикой каналов | 1973 |
|
SU526876A1 |
| Устройство для сопряжения электронно-вычислительной машины с внешним устройством | 1986 |
|
SU1388880A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КАНАЛАМИ | 1973 |
|
SU386395A1 |
Г
л i-TLJ
j чг Г
Ш
38
Ш
L
20
Г
1
т
/7
8
Фуе. 2
