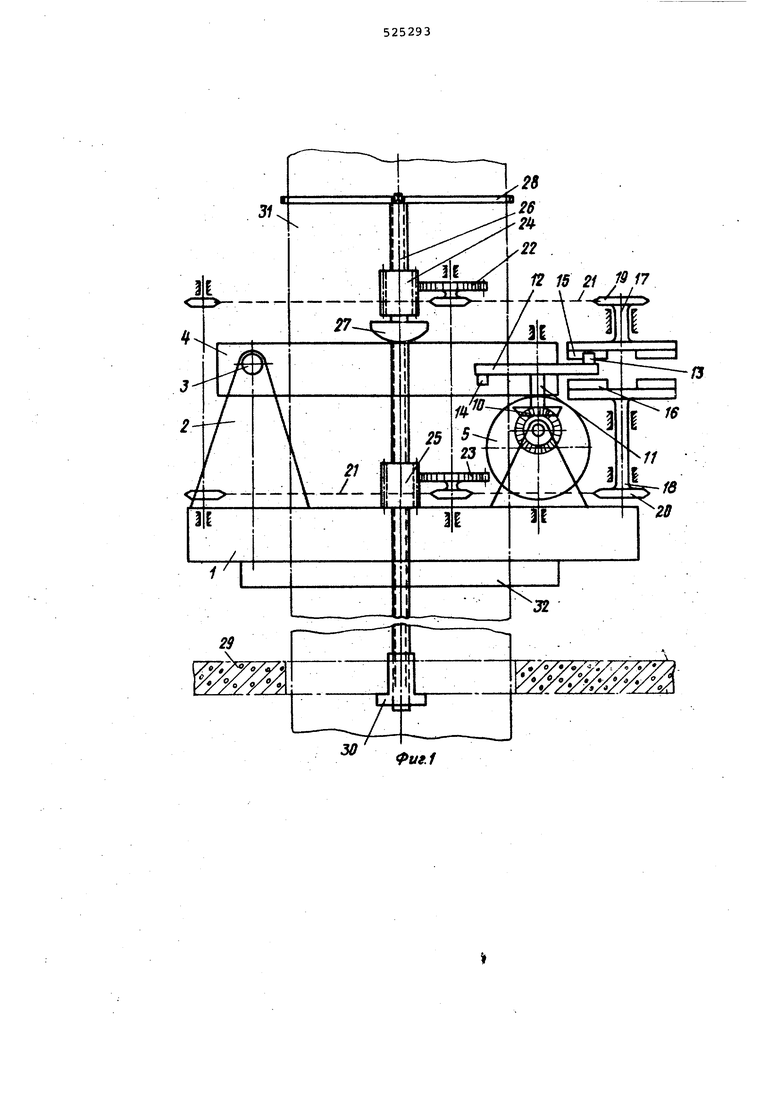
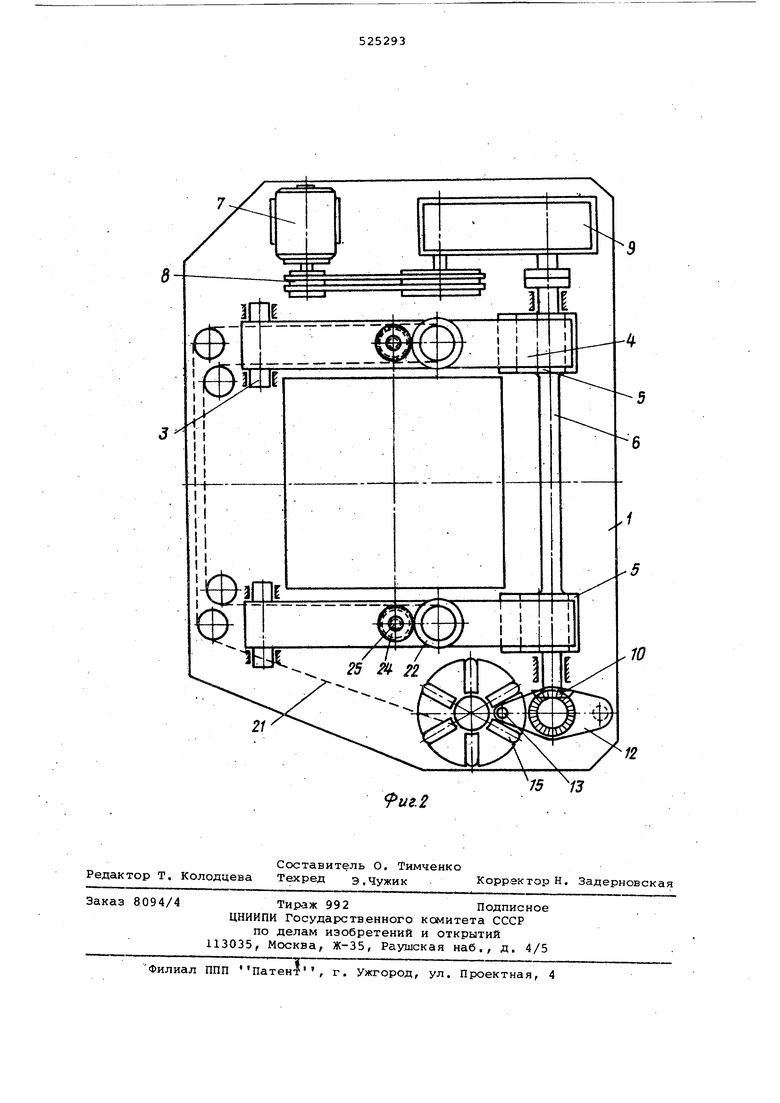
Изобретение относится к области строительства зданий методом подъезда этажей и перекрытий. Известны подъемники для перег-5ещения перекрытий зданий и крупногаба-ритных конструкций, содержащие опорную раму и смонтированные на ней гру зовые винты с верхними и нижними маточными гайками, снабженный эксцентриками механизм перемещения грузовых винтов, механизм вращения маточных гаек и привод. Однако эти подъемники конструктивно сложны, обладают значи тельной металлоемкостью и недостаточ но надежны в работе. . В целях повышения надежности, упрощения конструкции и снижения мета.ллоемкости в предлагаемом подъемни ке механизм перемещения грузовых вин тов содержит одноплечие рычаги, шарнирно связанные одними концами с рамой, на которой смонтирован вал с эксцентриками, взаимодействующим с другими концами рычагов, и ведущую коническую шестерню, которая укреплена на конце вала, другим концом связанного с приводом, а механизм вращения маточных гаек содержит уста новленные на раме промежуточные валы связанные с верхней и нижней маточны ми гайками цепной передачей. Причем на смежных концах промежуточных валов укреплены фланцы, выполненные с упорами, на раме вертикально укреплена ось, на которой установлено водило, снабженное двумя поводками, поочередно взаимодействующими с упорами фланцев, а на конце оси укреплена ведомая коническая шестерня, взаимодействующая с конической шестерней механизма перемещения грузовых винтов. На фиг, 1 изображен предлагаемый подъемник, вид сбоку (промежуточные валы условно развернуты на 180 ); на фиг. 2 - то же, вид сверху. На опорной раме 1 подъемника смонтированы стойки 2, несущие оси 3 с установленными на них рычагами 4. Свободными концами рычаги установлены на эксцентрики 5, укрепленные на валу 6, соединенном с приводом 7 через текстропную передачу 8 и редуктор 9. На конце несущего эксцентрика вала установлена коническая шестерня 10, передающая вращение на вал 11, связанный с водилсм 12 с укрепленными на немповодками 13 и 14, поочередно взаимодействующими с упорами 15 и 16 промежуточных валов 17 и 18, На валу 17 укреплена звездочка 19, а
на валу 18 - звездочка 20. Звездочки цепями 21, огибающими блок-шестерни 22 и 23, соединены соответственно с маточными гайками 24 и 25, установленными на грузовом винте 26 с опиJpaниeм гайкой 25 и раму 1, а гайкой 24 на 1ялчаг 4 сегментной пятой 27. Верхний конец винта 26 связан со скобой 28, предохраняющей винт от проворачивания. Поднимаемый груз (плита перекрытия) 29 закреплена на грузовом винте 26 гайкой 30. Лдя установ ки подъемника на колонне 31 последняя снабжена отверстием для шкворня 32, размещенного в нем.
Подъемник работает следующим образсм.
Привод 7 с помощью передачи 8 и редуктора 9 приводит во вращение вал б, который эксцентрикс ли 5 воздействует на рычаги 4, Рычаги после выборки зазора между гайкой 24 и пятой 27 поднимают грузовые винты 26. Когда между маточной гайкой 25 и опорной рамой 1 образуется необходимый зазор (4 мм), поводсж 14 входит в контакт с упорами 16 и поворачивает промежуточный вал 18 со звездочкой 20 под углом 60. Под воздейс-Ев ней цепи 21 и блок-шестерни 22 гайка 24 поворачивается на полоборота с таким расчете,; что, когда рычаг 4 доходит до нижнего положения, сохраняется зазор 4 мм между гайкой 24 и пятой 27. В итоге грузовой винт 26 поднимается на величину, равную половине шага резьбы винта, а весь механизм приходит в исходное положение. Далее цикл.повторяется.
Изменение направления движения груза с подъема на опускание происходит при реверсирований привода 7. Последовательность операций остается той же, что и при подъеме, но так как маточные гайки 24 и 25 вращаются в направлении, противоположном направлению при пбд-ьеале, они поднимаются по грузовому винту 26, тем самьм давая- ему возможность под действием груза опускаться. При самоподъеме по колонне подъемник работает в режиме опускания грузовых винтов, но так как грузовые винты при этом закреплены неподвижно на колонне, подъемник поднимается по ней.
QФормула изобретения
Подъемник для перемещения перекрытий зданий и крупногабаритных конструкций, содержащий опорную раму
, и смонтированные на ней грузовые винты с верхними и нижними маточными гайками, снабженный эксцентриками механизм перэлещения грузовых винтов, механизм вращения маточных гаек и привод, о т л и ч а ю щ и и с я тем, что, с целью повышения нгшежности подъемника в работе, упрощения его конструкции и снижения металлоемкости, механизм перемещения грузовых винтов содержит одноплечие рычаги,
5 шарнирно связанные одними концами с рамой, на которой смонтирован вал с эксцентриками, взаимодействующими с другими концами рычагов. и в едущую коническую шестерню, которая укрепле0 на; на конце вала, другим концом связанного с приводом, а механизм вращения маточных гаек содержит установленные на раме промежуточные валы, связанные с верхней и нижней маточными.
5 гайками посредством цепной передачи, причем на смежных концах промежуточных валов укреплены фланцы выполненные с упорами., на раме вертикально укреплена ось, на которой установлено
п водило, снабженное двумя поводками, поочередно взаимодействующими с упорами фланцев, а на конце оси укреплена ведомая коническая шестерня, взаимодействующая с конической шестерней механизма перемещения грузовых
винтов. 12 15 21 иг.1 
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой подъемник | 1988 |
|
SU1627502A1 |
| Подъемник | 1990 |
|
SU1801941A1 |
| Станок для пробивки отверстий в пластинах и сборки их со стержнями в пакет | 1982 |
|
SU1201163A1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| Способ подачи полосового материала к прессу и устройство для его осуществления | 1985 |
|
SU1279719A1 |
| Устройство для вертикального перемещенияКРупНОгАбАРиТНыХ КОНСТРуКцийздАНий и СООРужЕНий | 1979 |
|
SU812903A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| КРЕСЛО ДЛЯ ИССЛЕДОВАНИЯ ВЕСТИБУЛЯРНОГО АППАРАТА | 1966 |
|
SU181769A1 |
| Судовой лопастный двигатель | 1934 |
|
SU47908A1 |