Предлагаемое изобретение относится к усовершенствованию электромеханических исполнительных органов системы ориентации космических летательных аппаратов (КЛА) с использованием гироскопических устройств.
Для создания требуемой ориентации КЛА система ориентации и стабилизации содержит исполнительные органы, развивающие управляющие моменты.
Известные в настоящее время трехосные электромеханические исполнительные органы на базе гироскопических стабилизаторов выполняются по классической кинематической схеме гироскопических устройств: силовой гироскоп устанавливается в двухосный карданов подвес (см. Раушенбах Б.В., Токарь Е.Н. "Управление ориентацией космических аппаратов": М., Наука, 1974 г.). Поэтому все известные электромеханические исполнительные органы на базе гироскопических стабилизаторов обладают общим недостатком:
1. Имеют достаточно сложную конструкцию карданова подвеса с жесткими требованиями по точности на взаимное расположение сопрягаемых поверхностей деталей, входящих в карданов подвес.
2. Точность положения оси вращения гиромаховика (положение вектора Н) определяется суммарной величиной допусков деталей кинематической цепи от основания прибора до оси вращения гиромаховика.
3. Неотъемлемыми частями конструкции, влияющими на массу прибора, являются внутренняя и внешняя рамки карданова подвеса, детали подшипниковых узлов.
Наиболее близким аналогом предлагаемого технического решения является гиростабилизатор, приведенный в статье H.L.Work, Synthesis and design of gimbled reaction wheel attitude stabilization package AJAA paper, 950, 1971, c. 1-12.
Указанный аналог обладает теми же недостатками.
Целью предлагаемого изобретения является устранение вышеуказанных недостатков.
Предлагаемый электромеханический исполнительный орган на базе трехосного гиростабилизатора содержит генерирующий кинетический момент Н двигатель-маховик, выполненный по обращенной схеме.
Данный двигатель-маховик устанавливается в двухстепенной подвес, выполненный в виде сферического подшипника, причем наружное и внутреннее кольца этого подшипника являются одновременно корпусом двигателя-маховика. Электромеханический исполнительный орган содержит двухкоординатный датчик угла и моментное устройство.
Сущность изобретения поясняется чертежами, где:
на фиг.1 изображен общий вид предлагаемого электромеханического исполнительного органа;
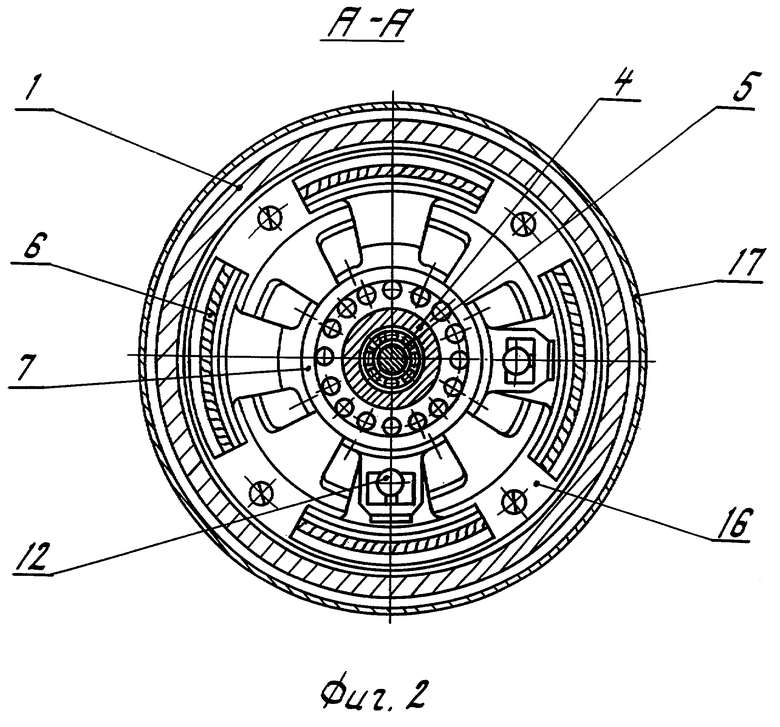
на фиг.2 - разрез по А-А.
Двигатель-маховик электромеханического исполнительного органа состоит из гиромаховика 1, на котором крепится обмотка ротора электродвигателя 2. Вал 3, на выходном (конусном) конце которого крепится гиромаховик 1, установлен в сферическую обойму 4 посредством шарикоподшипниковых опор 5.
Эта сферическая обойма 4 является внутренним кольцом сферического подшипника, на наружном кольце 7 которого на кронштейне 8 крепится обмотка статора 6.
Двухкоординатный датчик угла состоит из ротора 9, связанного с валом 3, и статора 10, установленного на основании корпуса 14, связанном с наружным кольцом подшипника 7.
Двухосное моментное устройство состоит из подвижной части 11, связанной со сферической обоймой 4, и корпуса 12, укрепленного на наружном кольце сферического подшипника 7 в подшипниках 13, обеспечивающих две степени свободы подвеса. Корпус двигателя-маховика состоит из основания 14, на котором закреплен штуцер 15 и кронштейн 16, связанный с наружным кольцом сферического подшипника 7.
Двигатель-маховик закрыт кожухом 17, обеспечивающим его герметичность.
Принцип работы предлагаемого электромеханического исполнительного органа описан в книге Раушенбах Б.В., Токарь Е.Н. "Управление ориентацией космических аппаратов", Москва, Машиностроение, 1974 г.
В зависимости от принципиальной кинематической схемы моментное устройство создает либо момент и в этом случае по этой же оси генерируется гироскопический управляющий момент, прикладываемый к корпусу космического летательного аппарата, либо - вектор скорости и управляющий гироскопический момент генерируется по перпендикулярной оси.
По мнению автора, в предлагаемом электромеханическом исполнительном органе оригинальным является:
1. Замена двухстепенного карданова подвеса сферическим подшипником, выполняющим функции карданова подвеса и корпуса двигателя-маховика.
2. Точность положения оси вращения гиромаховика (вектора Н) зависит только от разрешающей способности датчика угла и погрешности деталей кинематической цепи на точность положения не влияют.
3. Улучшаются габаритно-массовые характеристики прибора за счет выполнения сферическим подшипником нескольких функций и устранения в связи с этим целого ряда деталей и узлов.
4. Улучшение габаритно-массовых характеристик ориентировочно - 10-15%.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВОЙ ДВУХСТЕПЕННЫЙ УПРАВЛЯЮЩИЙ ГИРОСКОП | 1984 |
|
SU1839931A1 |
| СИЛОВОЙ ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1985 |
|
SU1839930A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН | 1982 |
|
SU1839925A1 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1984 |
|
SU1839933A1 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| Устройство управления стабилизирующими моторами курсовертикали | 2022 |
|
RU2787311C1 |
| ГИРОСТАБИЛИЗАТОР | 1978 |
|
SU1840380A1 |
| СИЛОВОЕ ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 1971 |
|
SU1839791A1 |
| ПРИВОД ПОВОРОТА РАМКИ КАРДАНОВА ПОДВЕСА ГИРОСТАБИЛИЗАТОРА | 1977 |
|
SU1839982A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН СИСТЕМЫ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1980 |
|
SU1839928A1 |
Изобретение относится к области оборудования космической станции. Исполнительный орган содержит корпус, двигатель-маховик в подвесе, двухкоординатный датчик углов, установленный на оси маховика, и моментное устройство. Подвес выполнен в виде сферического подшипника, во внутреннем кольце которого помещен подшипник вала маховика, а наружное кольцо связано с корпусом. Обмотка ротора размещена на маховике, а обмотка статора - на кронштейнах, связанных с наружным кольцом сферического подшипника. Технический результат - снижение габаритов и массы. 2 ил.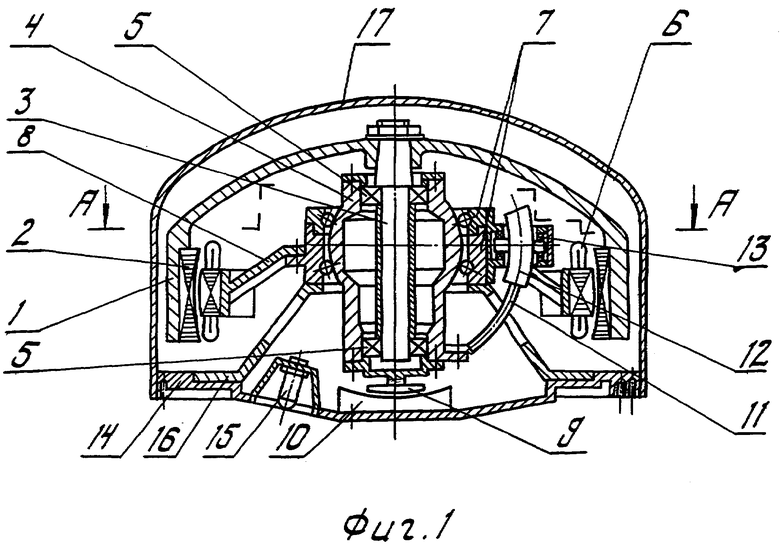
Электромеханический исполнительный орган космического аппарата, содержащий двигатель-маховик в подвесе, двухкоординатный датчик углов, установленный по оси маховика, моментное устройство, корпус, отличающийся тем, что, с целью снижения габаритов и массы, подвес выполнен в виде сферического подшипника, во внутреннем кольце которого помещен подшипник вала маховика, наружное кольцо связано с корпусом, при этом обмотка ротора размещена на маховике, а обмотка статора на кронштейнах, связанных с наружным кольцом сферического подшипника.
| H.L.Work | |||
| Synthesis and design of gimbled raction wheel attitude stabilization package AJAA paper, 950, 1971, с | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

