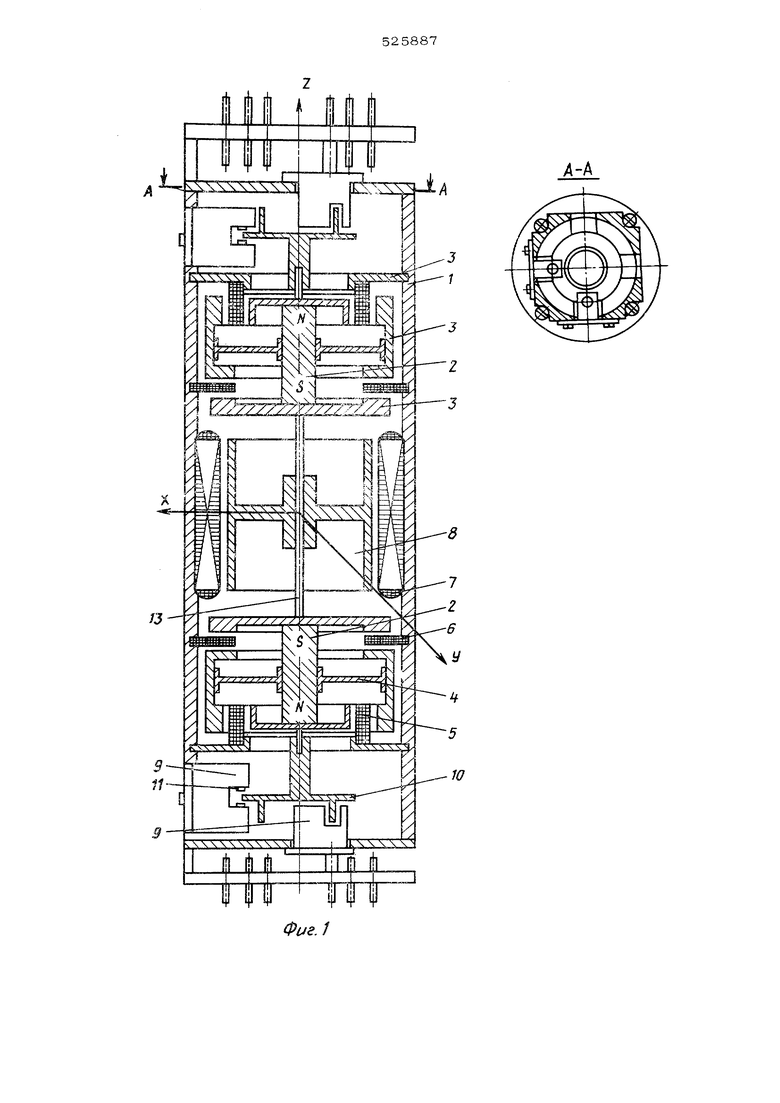
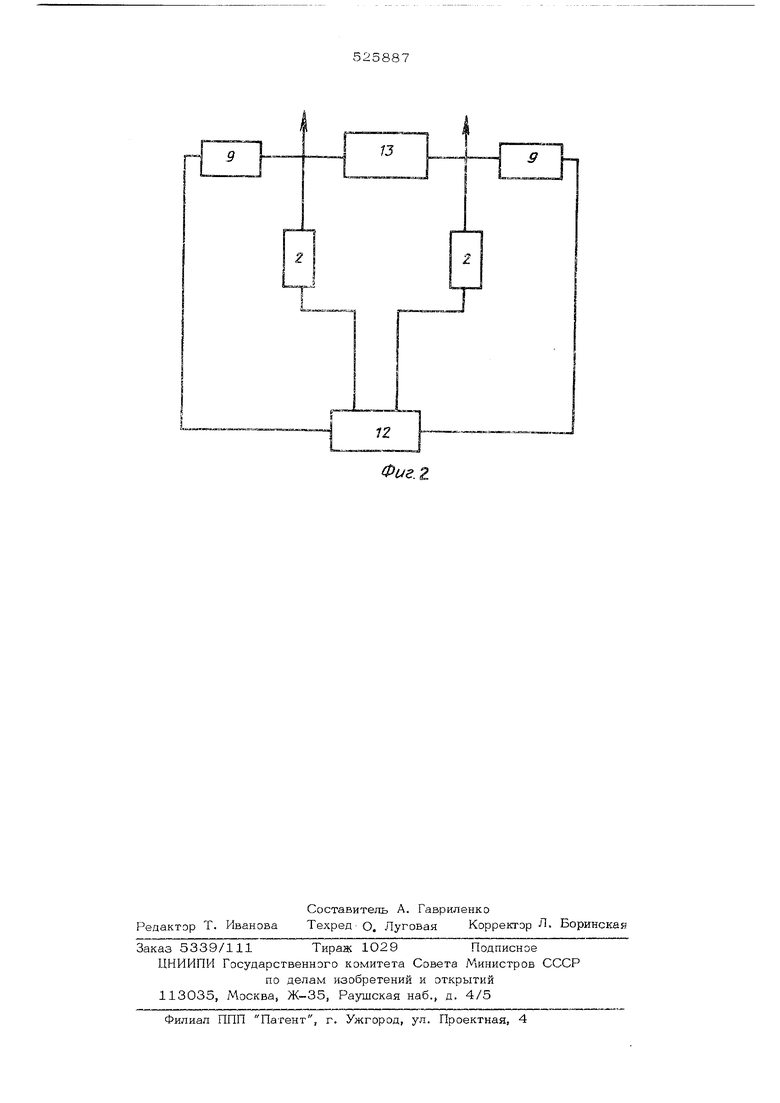
ИзобрвТекиэ касается измерения ров дв;чженкй. Известны устройства для измерения параметров движения, содержащие корпус с установленнь ми Б нем статором гиромотсра и квтушкамк на феррктовых сердечниках преобраасрзЕтелей перемещений, датчики ycps ЛИЙ, усилитель и подвес, выполненный, в ви де оск, псюредине которой расположен рэтЭ гиромоторЗ; а по ко;-:цам жестко укреп.1Е,;ы чувствигельнью эламекты преибраэоваГелей перемещений, выпслненные з виде кс-1ьпевых металлических пластик, находяиихся в зазотзб между катушками на ф.ерритон-ых сердечниках. Цэпь иаобретеиил - С1Ш ,ить -j exHOj.or вческле требования при сохранении точности Дпк этого в предлагаемо /; устройс;тве датчики -усхпяч выполнены в виде цилиндрических постоянных магнитов, укрепленных на оси совместно с магнитопроводами, два из которых устаноЕлены с торцом магнита, а третий Соосно оси на кольце из немагнитного материала, при этом токонесущие соосно 1 перпе ;дикулярно к оси. На фиг. 1 изобг1а. предлагаемое устройство; на фиг, 2 - его принципиальная схема. 3Ътройство содерж.5т корпус 1, датчики усилий, состоящие из цилиндрических постоянных магнитов 2. ягнитопроводоБ 3, два 13 которых устаноачены с торцов магнитов, а третий на колще 4, зыпо;1ненном из немагнигною материала, токонесущих катуцтек 5 и в, входя1Ц1г с D кольцевые зазоры ;..:С:Жду .;агнитоар ОБ одами; гирэ,отор, состоящий из статора н ротора 8; преобразователи перемешений 9, на которых уь.реплены чуьстаительные элементы 10, зыполне :нь в виде кольцевых металлически.х n.iacT.iH, наход51и;;:лся в зазоре eж:дy катушками с феррит овым;1 сердечниками 11; усилитель 12 и подвес 13, выиолненный в Бпде оси. Устройство работает следующим образом. Сигнал с преобразователей перемещеш{й 9 через усилитель 12 поступает в токонесущнь катушки 3 и 6, которьге взаимодействуют с магнитным потсжом постоянного магнита 2, создавая восстанавливающее усилие Оно обеспечивает устойчивость взвешенного тела (подвес 13) и автоматически регулируется по сигналам с преобразователей. Магнитопроводы 3 выполнены так, что позволяют создать усилия по трем осям. Каждая магнитная система имеет по два кольцевых зазора, в одном из которых расположена цилиндрическая токонес дшая катуш ка 5 измерительного канала, а в другом четыре секторные катушки 6 (по две диаметрально расположенных катушки на каждый измерительный канал по осям.ХХиуу) Все токонесущие катушки укреплены на неподвижной части прибора. Постоянные магниты 2, магнитопроводы 3, подвижные части преобразователей перемещений 9 и ротор 8 гиромотора жестко посажены на оси 13 и образуют подвижную взвешенную систему. Мерой действующих на взвешенное тело ускорений и угловых скоростей является сумма и разность величин напряжений, которые подаются в катушки датчиков усилий от преобразователей перемещений. Преобразователями пере- мешений служат ферритовые сердечники 11. Заслонкой для них является кольцевая метал лическая пластинка 10,которая, входя в зазо между катушками с ферритовьгми сердеч никами изменяет параметры высокочастот ного генератора. Для придания телу гироскопических свойств его вращают вокруг оси Z. Формула изобретения Магнитоэлектрическое устройство для измерения угловыхскоростей и ускорений, содержащее корпус с установленными в нем статором гиромотора и катушками на ферритовых сердечниках преобразователей перемещений, датчики усилий, усилитель и подвес, выполненный в виде оси, посредине ко торой расположен ротор гиромотора, а по концам жестко укреплены чувствительные элементы преобразователей переме щений, выполненные в виде кольцевых пластин, находящихся в зазоре между катушками на ферритовых сердечниках, отличающееся тем, что, с целью снижения технологических требований при сохранении точности, датчики усилий выполнены в виде цилиндрических постоянных магнитов, укрепленных на оси совместно с магнито проводами, два из которых установлены с торцов магнита, а третий - соосно оси на кольце, при этом токонесущие катущки входят в кольцевой зазор между ними соосно и перпендикулярно к оси.
РТИ
ll
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УГЛОВЫХ СКОРОСТЕЙ иУСКОРЕНИЙ | 1969 |
|
SU247653A1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| СПОСОБ ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА (ВАРИАНТЫ) И СПОСОБ ЗАПОЛНЕНИЯ ЦИЛИНДРИЧЕСКОГО ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА НЕСМЕШИВАЮЩИМИСЯ ЖИДКОСТЯМИ | 2004 |
|
RU2272252C1 |
| ГИРОСКОП | 2002 |
|
RU2210735C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ СПЕКТРА СИГНАЛА ИНДУКЦИИ В МАГНИТНО СВЯЗАННОЙ СИСТЕМЕ | 2011 |
|
RU2467464C1 |
| ДАТЧИК СКОРОСТИ ИЗМЕНЕНИЯ УСКОРЕНИЯ | 2015 |
|
RU2580212C1 |
| Вакуумметр | 1991 |
|
SU1793289A1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| ГИРОСКОП | 2005 |
|
RU2298151C1 |