1
Изобретение относится к общему машиностроению, а именно к механизмам регулирования и управления.
Известен винтовой механизм, содержащий корпус, закрепленную в нем гайку и сопряженный с ней винт 1. Такой механизм используется в механизмах для управления различными органами путем поступательного перемещения винта. Недостатком данного механизма является невозможность вывода винта из зацепления с гайкой для его свободного перемещения.
Наиболее близким но технической сущности к предлагаемому изобретению является ручной привод механизма управления турбонасосом или гидротурбиной, содержаииш корнус, разменянные в нем винт, гайку, выполненную в виде резьбового сегмента, направляющие и переключающие элементы 2.
Недостатком данного устройства является то, что вследствие больших нагрузок на гайку, выполненную в виде сегмента, последняя быстро выходит из строя, а также то, что данный механизм не позволяет быстро переключиться с одного вида работ на другой.
Цель изобретения - повышение надежности механизма и удобства переключения с одного вида работ на другой. Для этого гайка выполнена с резьбой на наружной поверхности, корпус выполнен с зубчатой нарезкой
на внутренней поверхности, а привод снабжен зубчатым фиксатором, навернутым на гайку и взаимодействующим с внутренней нарезкой корпуса и пружиной кручения, надетой на
гайку, один конец которой закреплен на гайке, а другой на фиксаторе.
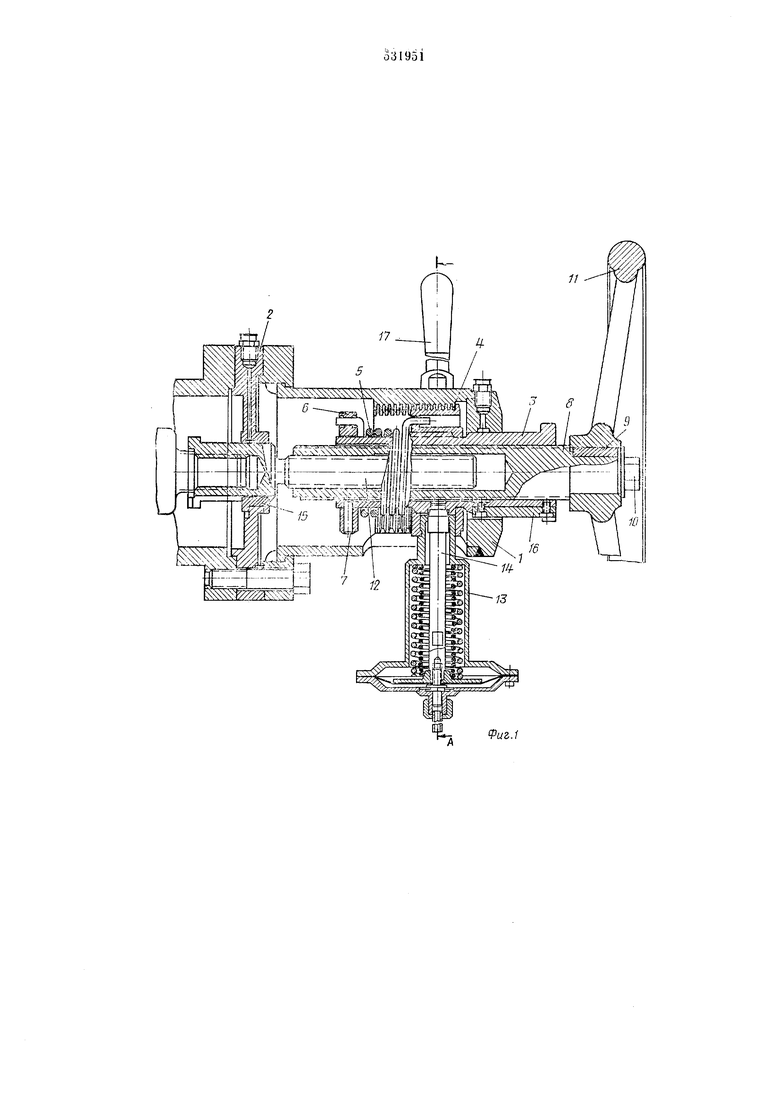
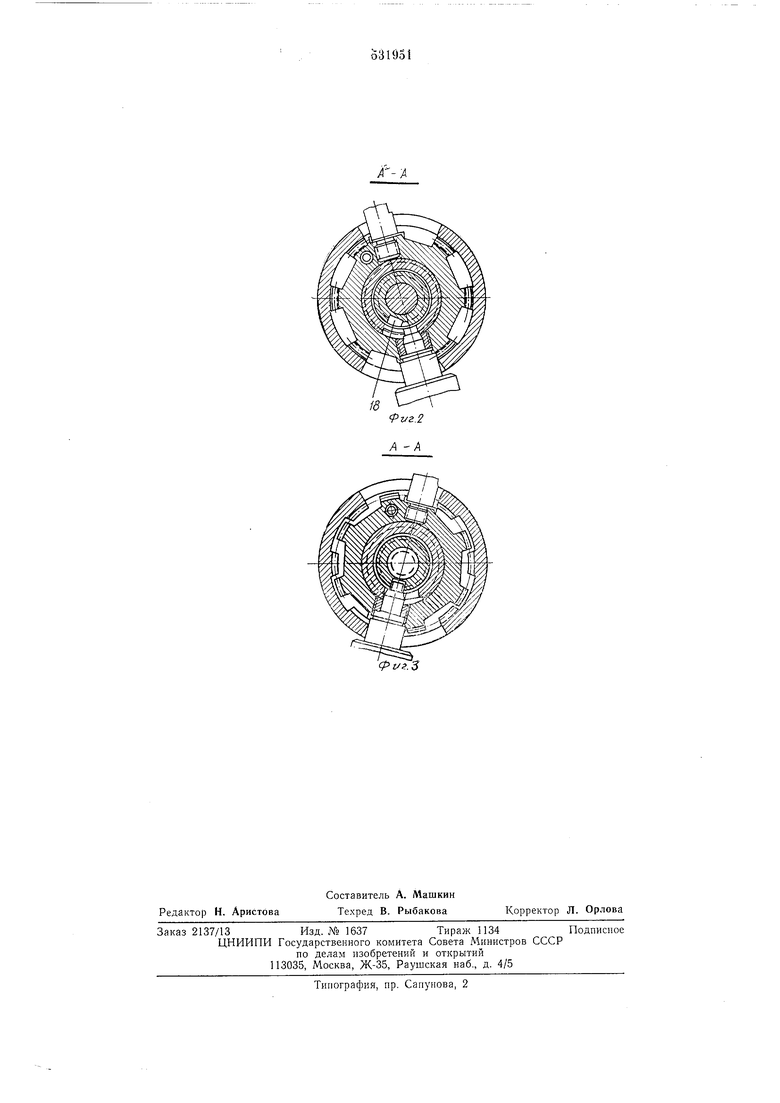
На фиг. 1 изображен ручной привод механизма управления гидротурбиной, продольный разрез; на фиг. 2 и 3 - сечение по А-А
на фиг. 1 соответственно для положения переключателя при ручном и автоматическом управлении.
Ручной привод механизма управления гидротурбиной содержит корпус 1 с выполненной на его внутренней поверхности зубчатой нарезкой с пазами для выхода из зацепления, соединенную с корпусом промежуточную опору 2, размещенную в корпусе гайку 3 с вынолненной на ее наружной новерхности резьбой. На гайку навернут з}бчатый фиксатор 4 и надета пружина 5 кручения, один конец которой закреплен в фиксаторе, а другой в кольце 6, закренленном на гайке 3 при помощи щтифта 7. С внутренней нарезкой гайки
сопряжен винт 8 с закрепленным на нем при помощи щпонки 9 и гайки 10 маховиком И. Винт 8 в свою очередь сопряичен е резьбовым щтоком 12. со следящим приводом. В зубчатом фиксаторе 4 креп1 тся пневматический перрключятрль 13 со щтоком 14.
Для обеспечения прямолинейного элементов привода в промежуточной опоре 2 и в гайке 3 закреплены шпонки 15 и 16. Рукоятка 17 служит для ручного поворота фиксатора 4.
При давлении воздуха в линии питания переключателя 13 свыше 1,15 кгс/см вся система может работать в режиме «автомат (см. фиг. 3). В этом режиме работы переключатель 13 штоком 14, входяш,им в паз 18 винтов 8, стопорит его от проворачивания в гайке 3. Зубья фиксатора 4 выведены из зацепления с зубьями корпуса 1, поэтому все детали, сочлененные с резьбовым штоком 12, могут свободно двигаться от следящего привода. При отсутствии или снижении давления воздуха в линии питания до 1±0,15 кгс/см переключатель автоматически переводит привод на ручное управление (см. фиг. 2). В этом режиме шток 14 переключателя выведен из паза 18 винта 8, а зубчатый фиксатор за счет пружины 5 поворачивается и входит в зацепление с зубчатой нарезкой корпуса 1, стопоря гайку 3 относительно корпуса.
При враш,ении маховика 11 на один оборот винт 8 сообш,ает резьбовому штоку 12 поступательное движение, равное разности шагов резьб. Для обеспечения вращения маховика
при ручном управлении необходи.мо отключить воздух из линии питания.
Формула изобретения
Ручной привод механизма управления гидротурбиной, содержащий корпус, размещенные в нем винт, гайку, направляющие и переключающие элементы, отличающийся
тем, что, с целью повышения надежности и удобства переключения с одного рода работ на другой, гайка выполнена с резьбой на наружной поверхности, корпус выполнен с зубчатой нарезкой на внутренней поверхности, а
привод снабжен зубчатым фиксатором, навернутым на гайку и взаимодействующим с внутренней нарезкой корпуса и пружиной кручения, надетой на гайку, один конец которой закреплен на гайке, а другой на фиксаторе.
Источники информации, принятые во внимание при экспертизе:
1.И. И. Артоболевский «Механизмы в современной технике, изд. «Наука, М., 1971 г.,
т. II, стр. 941, фиг. 2209.
2.Устройство дистанционного регулирования турбонасоса МНТ90-1500 УДР 1 Северодонецкого филиала ОКБА (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для навивки пружин кручения | 1982 |
|
SU1042859A1 |
| Электрический привод | 1986 |
|
SU1352140A1 |
| ПНЕВМОГАЙКОВЕРТ | 1992 |
|
RU2067923C1 |
| УСТРОЙСТВО ДЛЯ ВРЕЗКИ В НАПОРНЫЙ ТРУБОПРОВОД | 1999 |
|
RU2155295C1 |
| Винтовой механизм | 1976 |
|
SU656959A1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Устройство для ориентации, на-жиВлЕНия и НАВиНчиВАНия КРЕпЕжНыХдЕТАлЕй | 1978 |
|
SU806392A1 |
| Дыропробивной револьверный пресс | 1985 |
|
SU1286360A1 |
| ПРИВОД КЛАПАНА КРАНОВОГО ТИПА И РУЧНОЙ ДУБЛЕР ПРИВОДА | 2000 |
|
RU2179681C2 |
| Устройство для привода скважинного штангового насоса | 1990 |
|
SU1809863A3 |