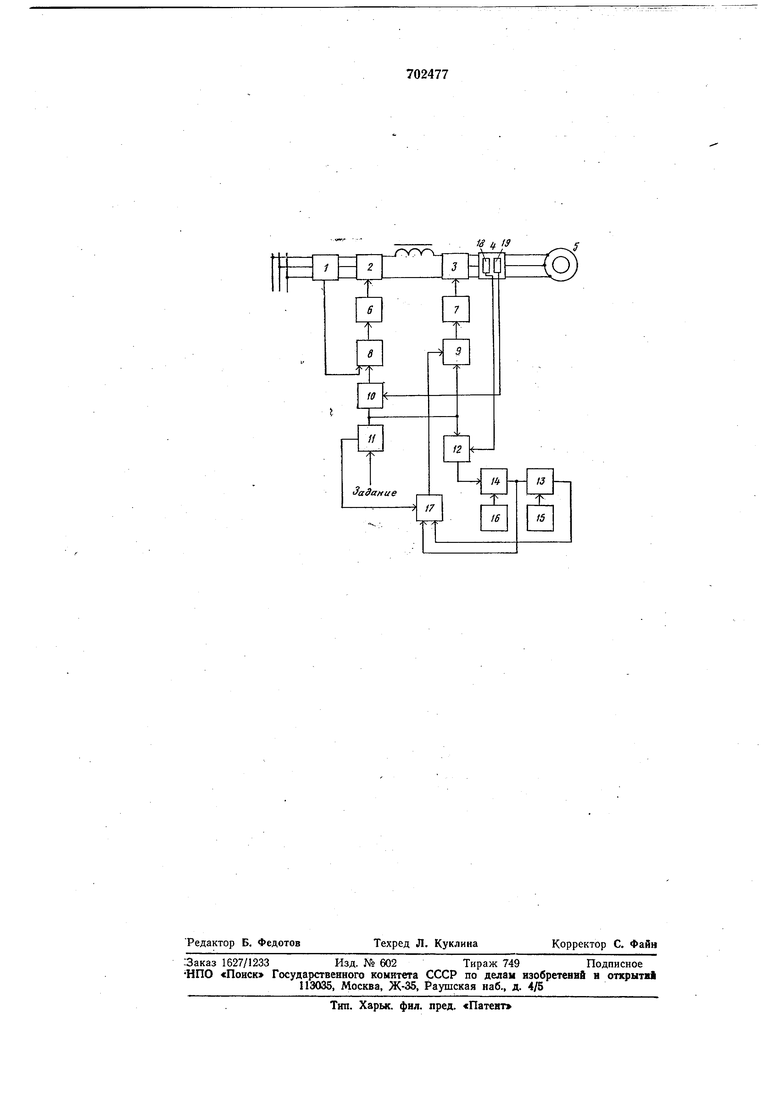
статоре асинхроикого двигателя и блок 19 измерения падения напряжения на сопротивлении статорной обмотки двигателя 5.
При пуске асинхрояяото двигателя 5 на выходе задатчика интенсивности 11 напряжение нарастает во времени ло линейному закону с необходимой скоростью. Выходной оживал задатчика 11 интенсивиости подается на входы регулятора ЭДС 10 и задающего генератора 9. Начинается раэгон асинXipoHHoro двигателя 5.
При нарастании и спаде сигнала задатчика 11 интенсивности его промежуточный сигнал, пропорциональный производной частоты по времени, переключает логический блок 17 таким образом, чтобы полярность подаваемого дополнительного сигнала соответствовала прикладному закону регулирования отношения .между частотой и напря1жен,ием на входе дви гател.я 5.
Величина дополн ктельного си пнала, подаваемого на вход задающего генератора 9, составляет несколько процентов от величины выходного си1гнада задатчика 11 интенсивности. Для этого параллельно усилителям 13 и 14 подключены блоки 15, 16 ограничения. При этом скольжение асинхронного двигателя 5 не правыщает к,ритического.
/
в установившемся режиме, когда сигнал задатч|Ика 11 неизменен, частота на выходе инвертора 3 определяется суммарным сигналом на входе задающего генератора 9, равньвм сумме сипналов с задатчика 11 и блока 17. При работе двигателя 5 на холос702477
том ходу величина второго дополнительного сишнала с блока 19 равна нулю.
С увеличением момента на валу двигател.я 5 возрастают падение напряжения на его статорлой обмотке, велич1ииа сишала блока 19, что соответственно приводит к увеличению напряжения на выходе имвартора 3 з.а 1счет работы регулятора ЭДС 10. Так как сигнал на выходе задатчика 11 инте;нсивности не изменяется, то увеличение напряжения на выходе инвертора 3 приводит к росту сигнала расоагласования на выходе измерителя 12, который усиливается с помощью усилителей 13 и 14 и поступает через блок 17 на вход задающего генератора 9. При этом частота на выходе инвертора 3 возрастает, компенсируя тем самым уменьшение скорости двигателя 5.
Благодаря введению в систему устранения автоколебаний асинх1ронного двигателя iBTOparo, дополнительного сигнала, пропорционального падению напряжения на статорной обмотке двигателя 5, повышается стабильность его скорости вращения.
Формула изобретения
Способ устранения автоколебаний асинхронного двигателя по авт. св. i№ 532167,
отличающийся тем, что, с целью повышения стабильности скорости, в цепь управления частотой преобразователя подают второй дополнительный сипнал, пропорциональный падению напряжения на сошротивлении ста торной обмотки асинхронного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ устранения автоколебаний асинхронного двигателя | 1974 |
|
SU532167A1 |
| Устройство для двухзонного регулирования асинхронного электродвигателя | 1976 |
|
SU752721A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Способ управления асинхронным электроприводом | 1990 |
|
SU1830608A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2331152C1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЦИФРОВЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2013 |
|
RU2543970C1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1252906A1 |