1
Изобретение относится к области машиностроения, а именно, к нневмогидравлическим позиционным приводам подачи инерционных объектов.
Известны пневмогидравлические позиционные приводы подачи инерционных объектов с силовым пневмогидродвигателем, пневмополость которого запитана от пневмомагистрали, а гидрополость - через дроссель и золотник ускоренных ходов с гидрополостью пневмогидроцилиндра возвратного движения, оснащенные цифровой позиционной обратной связью.
С целью снижения ошибки позиционирования инерционного объекта при воздействии на него постоянных и динамических нагрузок в предлагаемом пневмогидравлическом позиционном приводе подачи инерционных объектов силовой пневмогидродвигатель выполнен в виде двух последовательно расположенных пневматического и гидравлического силовых цилиндров, их поршни связаны общим штоком, причем отношение площадей поршней пневматического к гидравлическому находится в пределах 0,2-0,5.
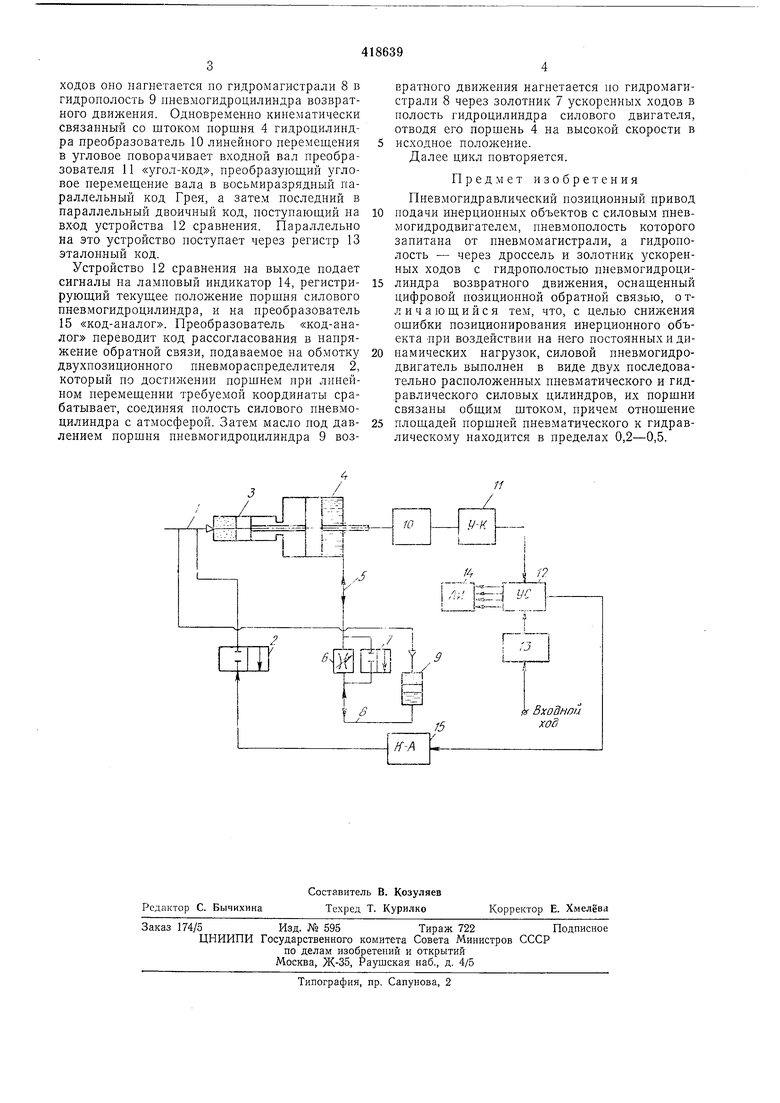
На чертеже изображена принципиальная схема пневмогидравлического позиционного привода подачи инерционных объектов.
Предлагаемый привод содержит пневмомагистраль 1, двухпозиционный пневмораспределитель 2 с силовым пневмоцилиндром 3, поршень которого жестко связан общим штоком с поршнем 4 гидроцнлппдра сплового пиевмогидропривода. Полость гндроцплпндра соединена гпдромагистралью 5 с дросселем 6 и золотником 7 ускоренных ходов, которые гидромаг 1стралью 8 связаны с гидрополостью 9 писвмогидроцилиндра возвратного движения. Шток гидроцилиндра силового привода сосдннеп с прссбразователем 10 линейного перемещения в угловое, являющимся элементом цифровой позиционной обратной связи, последовательно включающей преобразователь 1 «угол-код, подключенный выходом к устройству 12-сравнения, которое в свою очередь подключено своим входом к регистру 13 входных кодов с выходами к ламповому индикатору 14 и преобразователю 15 «код-аналог. Преобразователь 15 «код-ана.чог подключен выходом к
катушке двухпозиционного пневмораспределителя 2.
Цикл работы системы начинается подачей электропитания на двухпозиционный пневмораспределитель 2, который, срабатывая, соединяет ппевл:омагистраль 1 с полостью силового пнсв.моцилиидра 3. Поршни пневмогидроцилиндрсв 3, -i, перемеплаясь под давлением сжатого воздуха, вытесняют масло в гидро.магистраль 5, откуда через щелевой дроссель 6
(рабочая подача) или золотник 7 ускоренных
ходов оно нагнетается по гидромагистрали 8 в гидрополость 9 пневмогидроцилиндра возвратного движения. Одновременно кинематически связанный со штоком поршня 4 гидроцилиндра преобразователь 10 линейного перемещения в угловое поворачивает входной вал преобразователя 11 «угол-код, преобразуюш,ий угловое перемеш,ение вала в восьмиразрядный параллельный код Грея, а затем последний в параллельный двоичный код, поступаюш.ий на вход устройства 12 сравнения. Параллельно на это устройство поступает через регистр 13 эталонный код.
Устройство 12 сравнения на выходе подает сигналы на ламповый индикатор 14, регистрирующий текущее положение поршня силового пневмогидроцилиндра, и на преобразователь 15 «код-аналог. Преобразователь «код-аналог переводит код рассогласования в напряжение обратной связи, подаваемое ца обмотку двухпозиционного пневмораспределителя 2, который по достижении поршнем при линейном перемещении требуемой координаты срабатывает, соединяя полость силового пневмоцилиндра с атмосферой. Затем масло под давлением порщня пневмогидроцилиндра 9 возвратного движения нагнетается по гидромагистрали 8 через золотник 7 ускоренных ходов в полость гидроцилиндра силового двигателя, отводя его поршень 4 на высокой скорости в исходное положение. Далее цикл повторяется.
Предмет изобретения
Пневмогидравлический позиционный нривод подачи инерционных объектов с силовым пневмогидродвигателем, пневмополость которого запитана от нневмомагистрали, а гидрополость - через дроссель и золотпик ускоренных ходов с гидрополостыо нневмогидроцилиндра возвратного движения, оснащенный цифровой позиционной обратной связью, отличающийся тем, что, с целью снижения ошибки позиционирования инерционного объекта При воздействии на него постоянных и динамических нагрузок, силовой пневмогидродвигатель выполнен в виде двух последовательно расположенных пневматического и гидравлического силовых цилиндров, их поршни связаны общим щтоком, причем отношение площадей порщней пневматического к гидравлическому находится в пределах 0,2-0,5.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмоэлектрогидравлический следящий позиционный привод подачи инструмента | 1974 |
|
SU488450A1 |
| Реверсивный позиционный пневмогидравлический привод | 1974 |
|
SU465864A1 |
| Система синхронизации скорости поршней силовых цилиндров | 1979 |
|
SU770741A1 |
| Установка для формования полых оболочек (ее варианты) | 1982 |
|
SU1101312A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906664A1 |
| Пневмогидравлический позицион-Ный пРиВОд | 1979 |
|
SU795870A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906665A1 |
| Пневмогидравлический следящий привод | 1980 |
|
SU876376A2 |
| Универсальный автоматизированный пневмогидравлический привод подачи к металлорежущим станкам | 1977 |
|
SU627942A2 |
| УНИВЕРСАЛЬНЫЙ АВТОМАТИЗИРОВАННЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ПРИВОД ПОДАЧИ К МЕТАЛЛОРЕЖУЩИМ СТАНКАМ | 1967 |
|
SU215683A1 |
