Работа устройства осуществляется еледующим образом.
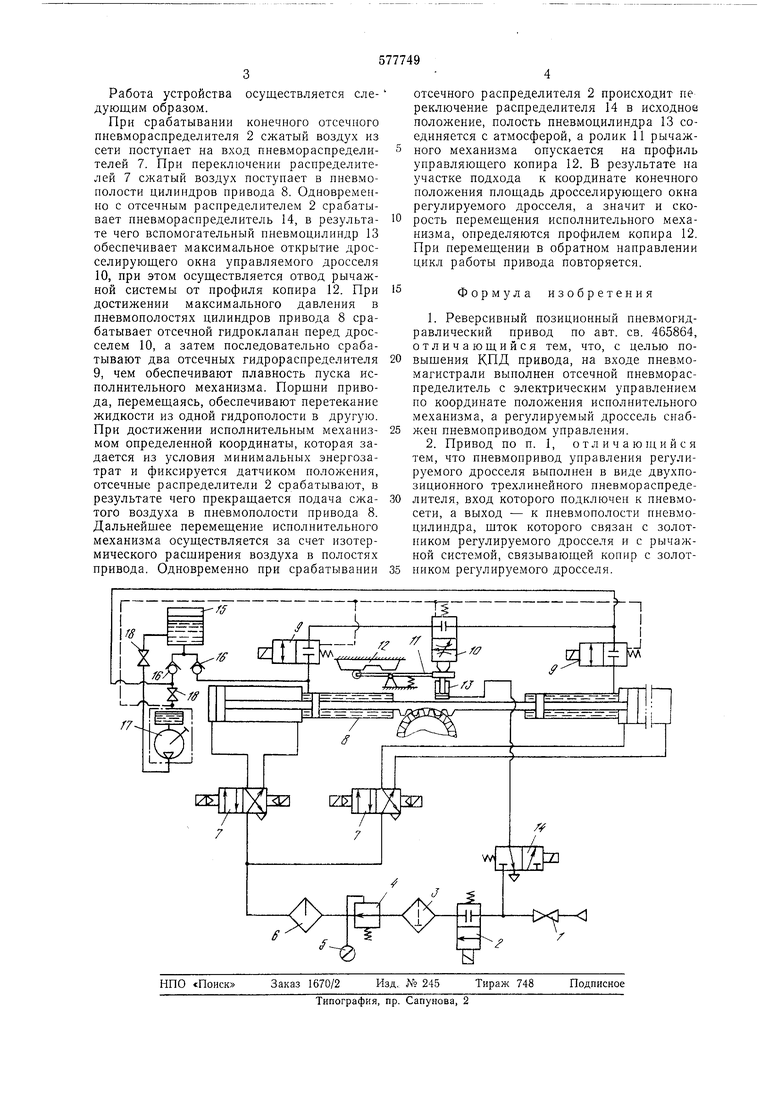
При срабатывании конечного отсечного пневмораспределителя 2 сжатый воздух из сети поступает на вход пневмораспределителей 7. При переключении распределителей 7 сжатый воздух поступает в пневмополости цилиндров привода 8. Одновременно с отсечным распределителем 2 срабатывает пневмораспределнтель 14, в результате чего вспомогательный пневмоцилиндр 13 обеспечивает максимальное открытие дросселирующего окна управляемого дросселя 10, при этом осуществляется отвод рычажной системы от профиля копира 12. При достижении максимального давления в пневмополостях цилиндров привода 8 срабатывает отсечной гидроклапан перед дросселем 10, а затем последовательно срабатывают два отсечных гидрораспределителя 9, чем обеспечивают плавность пуска исполнительного механизма. Поршни привода, перемещаясь, обеспечивают перетекание жидкости из одной гидрополости в другую. При достижении исполнительным механизмом определенной координаты, которая задается из условия минимальных энергозатрат и фиксируется датчиком положения, отсечные распределители 2 срабатывают, в результате чего прекращается подача ежатого воздуха в пневмополости привода 8. Дальнейщее перемещение исполнительного механизма осуществляется за счет изотермического расширения воздуха в полостях привода. Одновременно при срабатывании
отсечного распределителя 2 происходит пе реключение распределителя 14 в исходное положение, полость пневмоцилиндра 13 соединяется с атмосферой, а ролик 11 рычажного механизма опускается на профиль управляющего копира 12. В результате на участке подхода к координате конечного положения площадь дросселирующего окна регулируемого дросселя, а значит и скорость перемещения исполнительного механизма, определяются профилем копира 12. При перемещении в обратном направлении цикл работы привода повторяется.
Формула изобретения
1.Реверсивный позиционный пневмогидравлический привод по авт. св. 465864, отличающийся тем, что, с целью повышения КПД привода, на входе пневмомагистрали выполнен отсечной пневмораспределитель с электрическим управлением по координате положения исполнительного механизма, а регулируемый дроссель снабжен пневмоприводом управления.
2.Привод по п. 1, отличающийся тем, что пневмопривод управления регулируемого дросселя выполнен в виде двухпозиционного трехлинейного пневмораспределителя, вход которого подключен к пневмосети, а выход - к пневмополости пневмоцилиндра, шток которого связан с золотником регулируемого дросселя и с рычажной системой, связывающей копир с золотником регулируемого дросселя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система синхронизации скорости поршней силовых цилиндров | 1979 |
|
SU770741A1 |
| Пневмогидравлический цифровой позиционный привод | 1981 |
|
SU1021827A1 |
| Реверсивный позиционный пневмогидравлический привод | 1974 |
|
SU465864A1 |
| СПОСОБ УПРАВЛЕНИЯ РУЛЕВЫМ ПНЕВМОПРИВОДОМ УПРАВЛЯЕМОЙ РАКЕТЫ И РУЛЕВОЙ ПНЕВМОПРИВОД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2254501C2 |
| Установка для формования полых оболочек (ее варианты) | 1982 |
|
SU1101312A1 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906664A1 |
| Пневмоэлектрогидравлический следящий позиционный привод подачи инструмента | 1974 |
|
SU488450A1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ С ОДНОСТОРОННИМ УПРАВЛЕНИЕМ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2242575C1 |
| Реверсивный позиционный пневмогидропривод перемещения инерционных объектов | 1975 |
|
SU532507A1 |
