(54) ЭЛЕКТРОПРИВОД
ного двигателя, а так как момент трения является нелинейной функцией от скорости, то в .системах с высокой добротностью также возникают автоколебания. С возрастанием быстродействия системы увеличивается амплитуда автоколебаний. Таким образом, трение, люфт и кинематическая погрешность редуктора снижают точность систем.
Для Повышения точности угловых скоростей и перемещений в предлагаемом электроприводе ось ротора размещена параллельно оси индукторов.
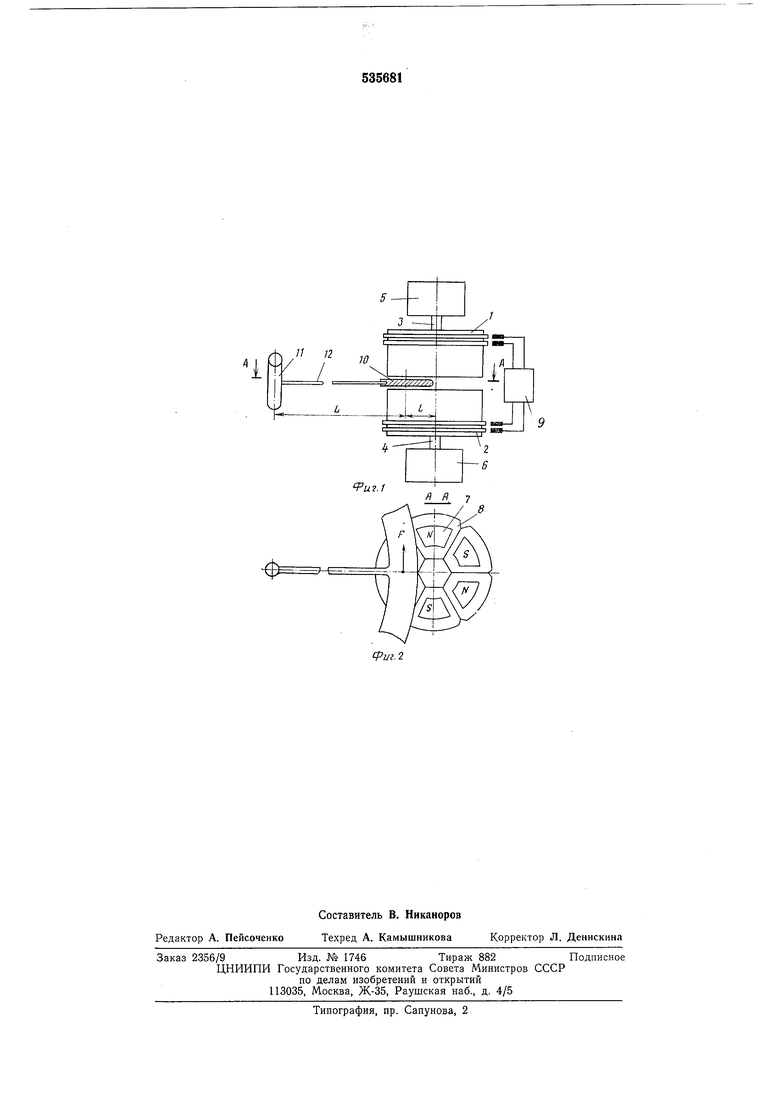
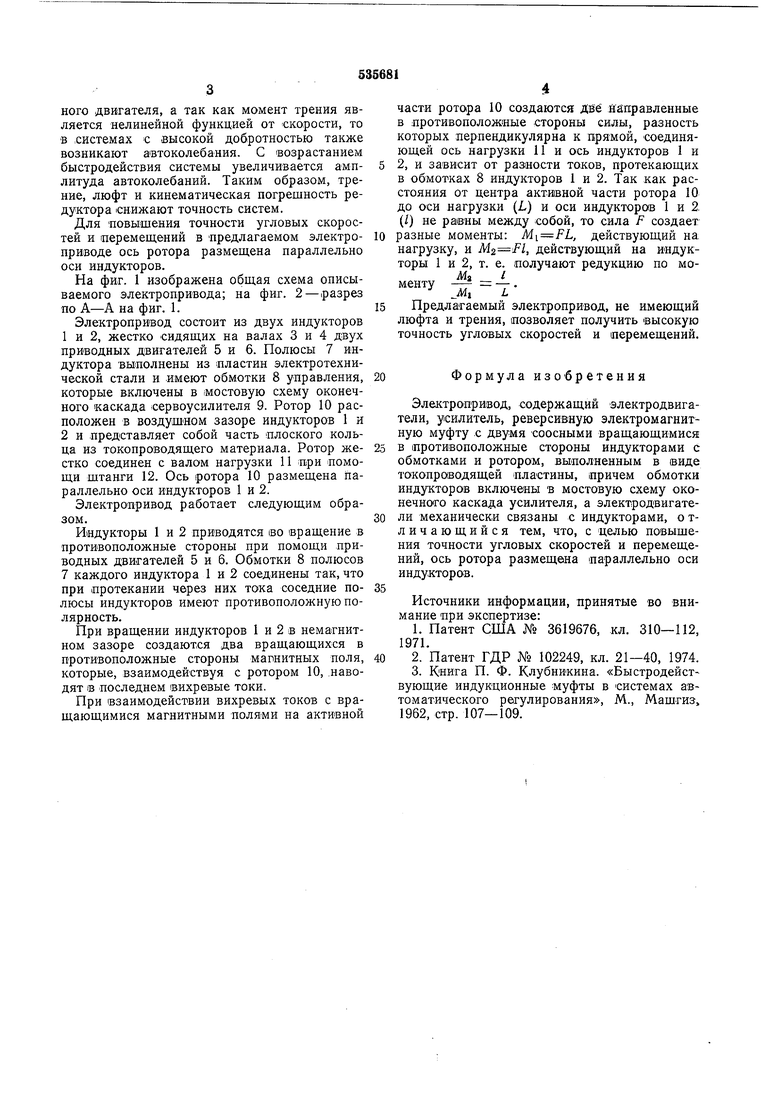
На фиг. 1 изображена общая схема описываемого электропривода; на фиг. 2 - .разрез по А-А на фиг. 1.
Электропри1вод состоит из двух индукторов
1и 2, жестко сидящих на валах 3 и 4 двух приводных двигателей 5 и 6. Полюсы 7 индуктора выполнены из пластин электротехнической стали и имеют обмотки 8 управления, которые включены в -мостовую схему оконечного каскада icepвoycилитeля 9. Ротор 10 расположен в воздушном зазоре индукторов 1 и
2и представляет собой часть плоского кольца из токопроводящего материала. Ротор жестко соединен с валом нагрузки 11 три помощи штанги 12. Ось ротора 10 размещена параллельно оси индукторов 1 и 2.
Электропривод работает следующим образом.
Индукторы 1 и 2 приводятся IBO вращение в противоположные стороны при помощи приводных двигателей 5 и 6. Обмотки 8 полюсов 7 каждого индуктора 1 и 2 соединены так, что при протекании через них тока соседние полюсы индукторов имеют противоположную полярность.
При вращении индукторов 1 и 2 в немагнитном зазоре создаются два вращающихся в противоположные стороны магнитных поля, которые, взаимодействуя с ротором 10, наводят IB последнем вихревые токи.
При взаимодействии вихревых токов с вращающимися магнитными полями на активной
части ротора 10 создаются две направленные в противоположные стороны силы, разность которых перпендикулярна к прямой, соединяющей ось нагрузки И и ось индукторов 1 и 2, и зависит от разности токов, протекающих в обмотках 8 индукторов 1 и 2. Так как расстояния от центра активной части ротора 10 до оси нагрузки (L) и оси индукторов 1 и 2. (/) не равны между собой, то сила F создает разные моменты: , действующий на нагрузку, и , действующий на индукторы 1 и 2, т. е. получают редукцию по моМа /
менту -- -,
Предлагаемый электропривод, не имеющий люфта и трения, позволяет получить высокую точность угловых скоростей и перемещений.
Формула изобретения
Электропривод, содержащий электродвигатели, усилитель, реверсивную электромагнитную муфту с двумя соосньши вращающимися в противоположные стороны индукторами с обмотками и ротором, выполненным в виде токопроводящей пластины, причем обмотки индукторов включены в мостовую схему оконечного каскада усилителя, а электродвигатели механически связаны с индукторами, о тличающийся тем, что, с целью повышения точности угловых скоростей и перемещений, ось ротора размещена параллельно оси индукторов.
Источники информации, принятые во внимание при экспертизе:
1.Патент США № 3619676, кл. 310--112, 1971.
2.Патент ГДР № 102249, кл. 21-40, 1974.
3.Книга П. Ф. Клубникина. «Быстродействующие индукционные муфты в системах автоматического регулирования, М., Машгиз. 1962, стр. 107-109.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1982 |
|
SU1066032A1 |
| Устройство для преобразования вращательного движения в поступательное | 1979 |
|
SU864435A1 |
| Устройство для преобразования вращательного движения в поступательное | 1978 |
|
SU792499A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРО-ДИФФЕРЕНЦИАЛАМИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794720C1 |
| ЭЛЕКТРОПРИВОД ДЛЯ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 2013 |
|
RU2533177C1 |
| Вентильный двигатель | 1976 |
|
SU663037A1 |
| СПОСОБ ПРОГРАММНОГО ПОЗИЦИОННОГО УПРАВЛЕНИЯ МНОГОФАЗНЫМ ШАГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ЭЛЕКТРИЧЕСКИМ ДРОБЛЕНИЕМ ШАГА | 1990 |
|
RU2020725C1 |
| Электропривод | 1982 |
|
SU1072225A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2626581C1 |