В исходном положении исполнительный механизм 4 отключен от блока регулирования 9, в ячейках памяти // запомнены оптимальные значения управляющих сигналов.
Вход и выход блока регулирования 9 соединяются с выходоМ датчика 5 и входом исполнительного механизма /-го агрегата 4 в моменты времени, когда значение регулируемой величины выйдет за допустимые пределы. ПодключенИв осуществляется по ко.манде блока управления 6, который с помощью блоKOiB переключения 7 и -S соединяет вход блока регулирования 9 € выходом датчика 5 /-го агрегата, а выход блока регулирования 9 - с входом ячейки памяти 11 /-го исполнительного мёхангИЗма.
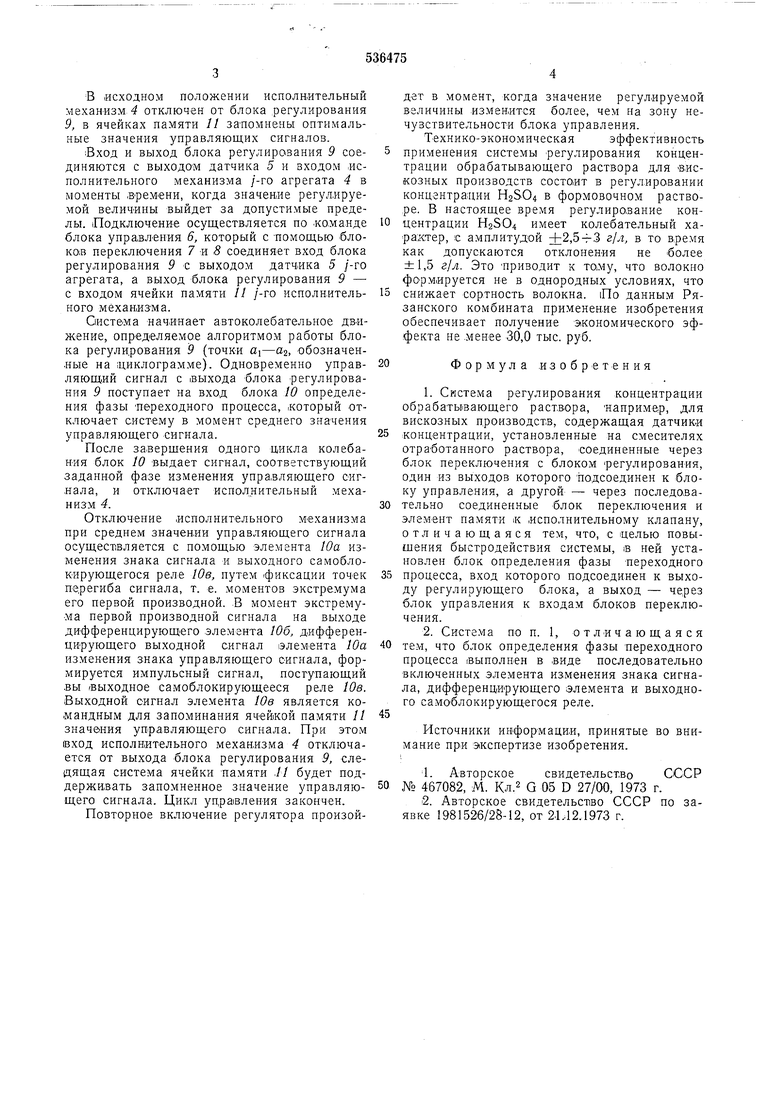
Система начинает автоколебательное движение, определяемое алгоритмом работы блока регулирования 9 (точки , обозначенные на циклограмме). Одновременно управляющий сигнал с выхода блока регулирования 9 поступает на вход блока 10 определения фазы Переходного процесса, .который отключает систему в момент среднего значения управляющего сигнала.
После завершения одного цикла колебания блок 10 выдает сигнал, соответствующий заданной фазе изменения управляющего сигнала, и отключает исполнительный механизм 4.
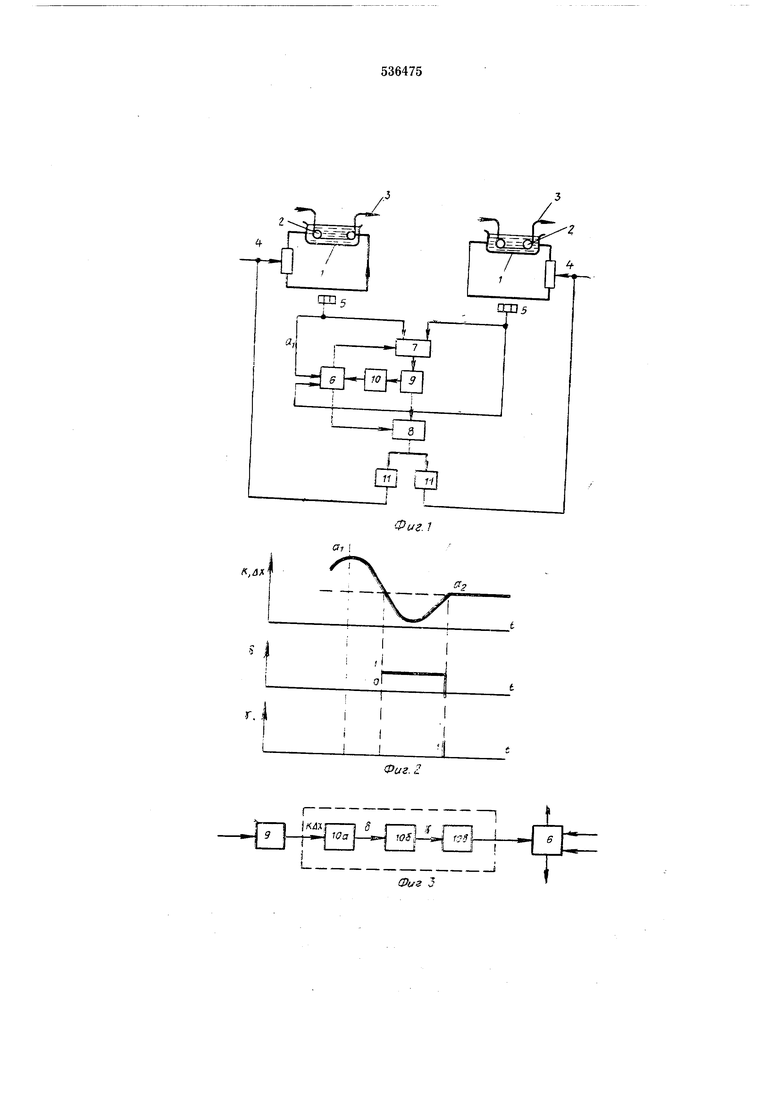
Отключение исполнительного механизма при среднем значении управляющего сигнала осуществляется с помощью элемента 10а изменения знака сигнала и выходного самоблокирующегося реле 10в, путем фиксации точек перегиба сигнала, т. е. моментов экстремума его первой производной. .В момент экстремума первой производной сигнала на выходе дифференцирующего элемента 106, дифференцирующего выходной сигнал элемента 10а изменения знака управляющего сигнала, формируется импульсный сигнал, поступающий вы выходное самоблокирующееся реле 10в. Выходной сигнал элемента We является командным для запоминания ячейкой памяти 1 значеНия управляющего сигнала. При этом вход исполнительного механизма 4 отключается от выхода блока регулирования 9, следящая система ячейки памяти .// будет поддержи,вать запомненное значение управляющего сигнала. Цикл управления закончен.
Повторное включение регулятора произойдет в момент, когда значение регулируемой величины изменится более, чем па зону нечувствительности блока управления.
Технико-экономическаяэффективность
применения системы регулирования концентрации обрабатывающего раствора для вискозных производств состоит в регулировании концентра:ции H2S04 в формовочном растворе. В настоящее время регулирование концентрации H2S04 имеет колебательный характер, с амплитудой +2,5-гЗ г/л, в то время как допускаются отклонения не более ±1,5 г/л. Это Приводит к TOiMy, что волокно формируется не в однородных условиях, что
снижает сортность волокна. |По данным Рязанского комбината применение изобретения обеспечивает получение экономического эффекта не .менее 30,0 тыс. руб.
Формула изобретения
1.Система регулирования концентрации обрабатывающего раствора, например, для вискозных производств, содержащая датчики
:концентрации, установленные на смесителях отрвботанного раствора, соединенные через блок переключения с блоком регулирования, один из выходов которого подсоединен к блоку управления, а другой - через последовательно соединенные блок переключения и элемент памяти « исполнительному клапану, отличающаяся тем, что, с целью повышения быстродействия системы, в ней установлен блок определения фазы переходного
процесса, вход которого подсоединен к выходу регулирующего блока, а выход - через блок управления к входам блоков переключения.
2.Система по п. 1, отличающаяся тем, что блок определения фазы переходного
процесса выполнен в виде последовательно включенных элемента изменения знака сигнала, дифференцирующего элемента и выходного самоблокирующегося реле.
Источники информации, принятые во внимание при экспертизе изобретения.
1.Авторское свидетельство СССР № 467082, М. Кл.2 G 05 D 27/00, 1973 г.
2.Авторское свидетельство СССР по заявке 1981526/28-12, от 2.1..12.1973 г.
СШ5
-i
5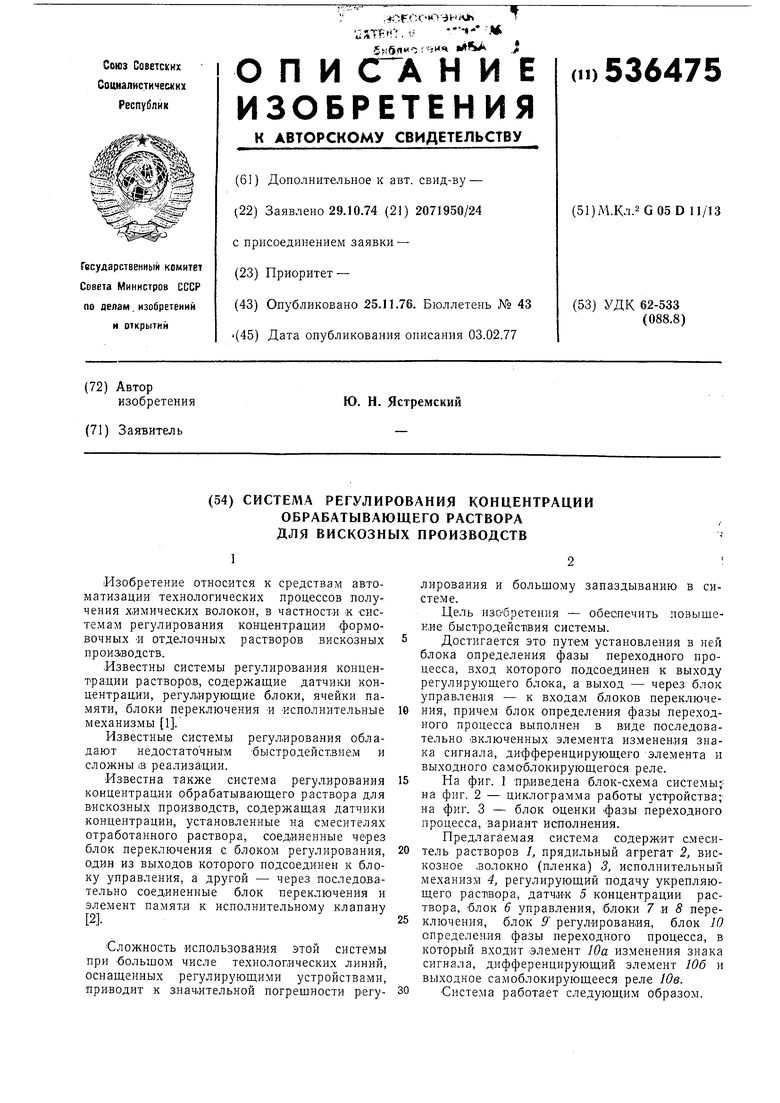
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| ПРОПОРЦИОНАЛЬНЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1965 |
|
SU174249A1 |
| Способ автоматического управления процессом приготовления многокомпонентных смесей полимеров | 1986 |
|
SU1392585A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ОПТИМИЗАЦИИ | 1967 |
|
SU224644A1 |
| Двухканальный шаговый оптимизатор | 1985 |
|
SU1343391A1 |
| РЕГУЛЯТОР С ПЕРЕКЛЮЧАЕМЫМИ ПАРАМЕТРАМИ | 1969 |
|
SU235135A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| ПНЕВМАТИЧЕСКИЙ ДИСКРЕТНЫЙ РЕГУЛЯТО ОПТИМАЛЬНОГО РЕЖИМА | 1971 |
|
SU432457A1 |
| Идентификатор многомерных объектов | 1984 |
|
SU1215086A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ ВОДЯНЫХ НАСОСОВ | 2003 |
|
RU2251206C2 |
л,лл
Ф Ф
