(54) ЗАХВАТ ДЛЯ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ К ПОГРУЗЧИКУ
устройства водитель погрузчика должен покинуть свое рабочее место, подключить через гидравлический выключатель коротку лапу, занять рабочее место,перенастроить устройство на новый диаметр перегружаемого груза, снова покинуть рабочее место и отключить короткую лапу, после чего снова занять рабочее место и продолжать работу или же ему должен помогать второй рабочий, выполняющий все вспомогагтельные операции по перенастройке захвата.
Целью изобретения является повышение производительности и безопасности перегрузочных операций с грузами, находяши- мися в различных положениях. Для этого в трубопровод гидропривода нижней лапы захвата вмонтированы параллельно включенные гидравлическое сопротивление (дроссель) двустороннего действия и двухпозиционный распределительный орган.
При включенном дросселе величина гидравлического сопротивления в гидроцилиндре нижней лапы становится такой, что нижняя лапа остается неподвижной до тех пор, пока верхняя лапа не достигнет какого-либо крайнего положения и только посл этого нижняя лапа начинает двигаться с замедленной скоростью, что позволяет водителю погрузчика произвести перенастройку захвата для перегрузки грузов различных диаметров не сходя с места.
При отключенном дросселе давление в цилиндрах уравновешено, и обе лапы движутся одновременно, что необходимо для перегрузки стоящих на основании грузов.
Операция по перенастройке захвата для работы с грузами различного диаметра осуществляется автоматически, а операция по включению-отключению дросселя - вручную с места водителя.
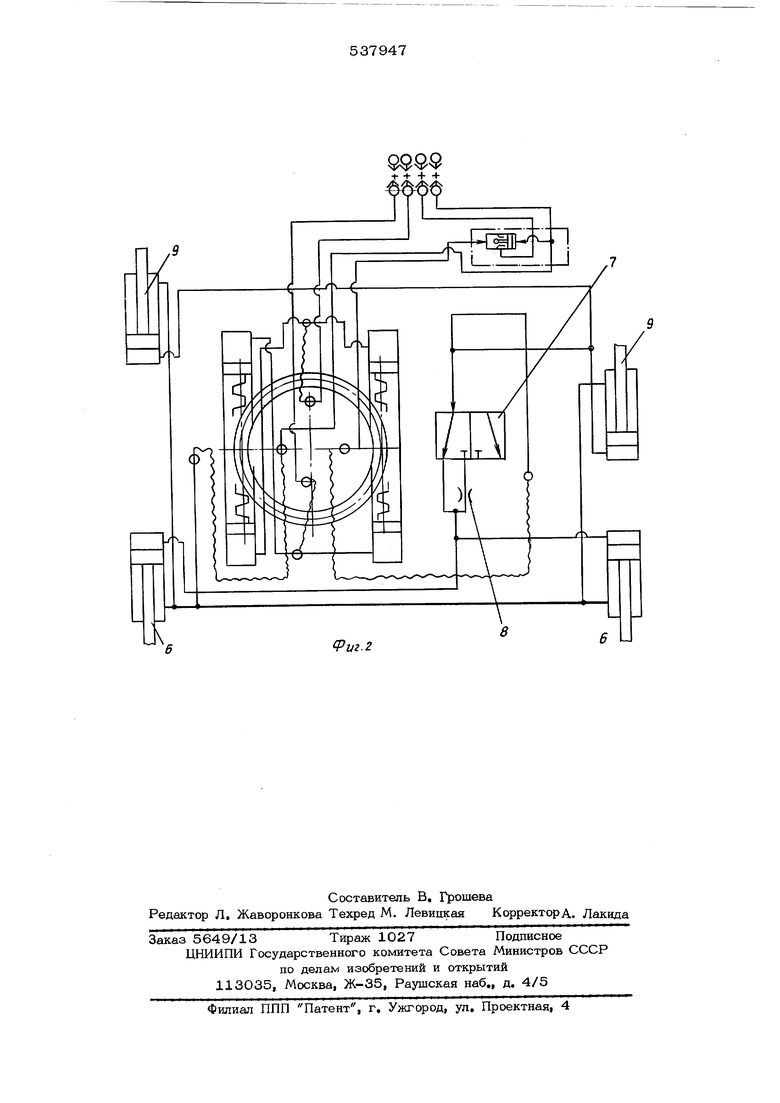
На фиг, 1 изображен предлагаемый зах ват, вид сбоку; на фиг. 2 - гидравлическая схема захвата.
Захват состоит из основания 1, которое навешивается на каретку погрузчика, и поворотной части 2. Основание и поворотная часть 2 соединяются между собой шаровым погоном, а вращение осуществляется при пок.оши шток-реек, обкатывающихся вокруг шестерни.
К корпусу поворотной части 2 шарнирно крепятся рабочие органы, которые состоят из верхней лапы 3 с самоустанавливающейся колодкой 4 и нижней (короткой лапы 5 с самоустанавливающейся колодкой 4.
Привод нижней лапы 5 осуществляется гидроцилиндрами 6, которые между собой соединены параллельно и через распределительный кран 7 с гидравлическим сопротивлением 8 с гидроцилиндрами 9, приводящими верхнюю лапу 3.
При перегрузке цилиндрических грузов, СТОЯЩ.ИХ на основании, распределительный кран находится в положении, отключающим гидравлическое сопротивление 8, и обе лапы 3 и 5 работают одновременно.
При перегрузке цилиндрических грузов, лежащих на образующей, водитель со своего рабочего места переводит распредели-
тельный кран 7 в положение, подключающее гидравлическое сопротивление 8. Нижняя лапа 5 становится неподвижной. Перенастройка захвата производится водителем с рабочего места путем включения вхолостую захвата до достижения верхней лапы какого-либо крайнего положения, после чего начнет двигаться с замедленной скоростью нижняя лапа.
Предложенный захват значительно ускоряет погрузо-разгрузочные операции, так как позволяет водителю не отходя от пульта управления погрузчика с помощью распределительного крана регулировать раэдвижение рабочих органов для взятия груза любого диаметра. Кроме того, введение гидравлического сопротивления (дросселя) упрощает и ускоряет зажим лежащих на образующей цилиндрических грузов.
Формула изобретения
Захват для цилиндрических грузов к погрузчику, содержащий поворотные в вертикальной плоскости лапы с самоустанавливающимися колодками на концах и гидропривод с гидроцилиндрами и трубопроводом, отличающийся тем, что, с целью повыщения производительности и беэопасности перегрузочных операций с грузами, находящимися в различных положениях, в трубопровод гидропривода нижней лапы захвата вмонтированы параллельно включенные гидравлическое сопротивление двустороннего действия и двухпозиционный распределительный кран.
Источники информации, принятые во внимание при экспертизе:
1. Патент ФРГ № 1095203, кл. 81е 107, 1961г.
2. .Авт.св. № 178302, кл. В66 f 9/18, 1963 г. / иг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство "кондок" к погрузчику | 1977 |
|
SU658081A1 |
| ГРУЗОЗАХВАТ-СТАЛКИВАТЕЛЬ К ПОГРУЗЧИКУ | 1996 |
|
RU2116958C1 |
| ГРУЗОЗАХВАТ К ПОГРУЗЧИКУ | 1996 |
|
RU2120401C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| ЗАХВАТ К ПОГРУЗЧИКУ ДЛЯ ДЕРЕВЯННЫХ БОЧЕК | 1968 |
|
SU220838A1 |
| Вилочный захват к погрузчику | 1980 |
|
SU1011496A1 |
| Захват-кантователь к погрузчику для бочек | 1980 |
|
SU901257A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |