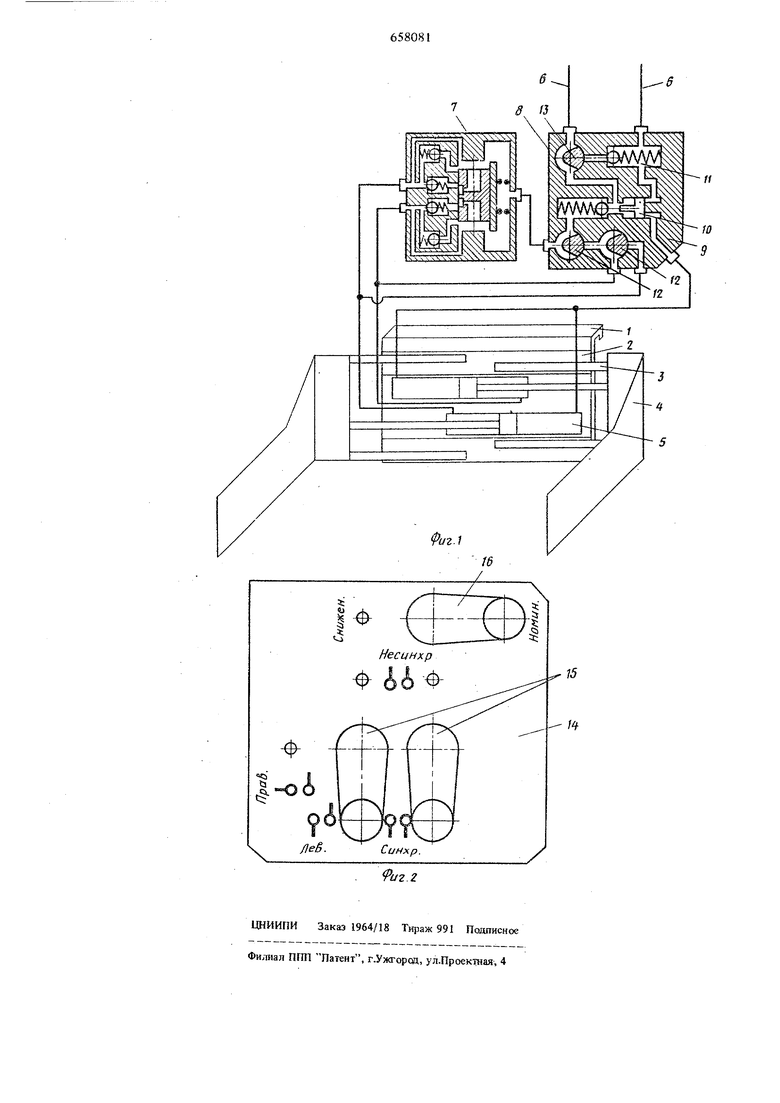
Изобретение относится к области подъемнотранспортной техники и может быть использова но при создании универсальных грузозахватов к погрузчикам общего назначения для перегрузки различных штучных трузов, например рулонов, кип, бочек, пакетов и т.д. Известно захватное устройство к погрузчику, содержащее основание с направляющими, в которых расположены ползуны, несущие сменные захватные лапы, и гидропривод с гидроцилиндрами и трубопроводом 1 . Недостаток известного захватного устройства заключается в том, что в нем гидравлические ци линдры включены параллельно, в результате чего не обеспечивается равномерность движения захватных лап, что затрудняет осуществление перегрузочных операций, особенно в тесных усло виях, например, при разборке плотных щтабелей щтучных грузов в вагонах, трюмах судов и внут ри больпгегрузных контейнеров. Целью изобретения является расширение зксплуатацио1шьгх возможностей устройства. Достигается зто тем, что в трубопроводе идропривода последовательно установлены реверсивный порционер и гидроблок, содержащий корпус, в котором cMOHTMpoBain t регулятор давления, гидравлически соединенный с ним шдрозамок и управляемые распределительные золотники. На фиг. 1 изображена схема описываемого захватного устройства; на фиг. 2 - вид на панель управления гидроблока. Грузозахватное устройство состоит из основания I, которое навещивается на каретку погру шка. Основание 1 имеет направляющие 2, в которых расположены ползуны 3, с закрепленными на Ш1Х сменными (для различных грузов) захват-, ными лапами 4. На основашш 1 закреплены двусторонние гидроцилиндры 5, связанные с ползунами 3. Гидрощшиндры 5 соединены с трубопроводами 6 через реверсивный порционер 7 и гидроблок 8. Гвдроблок 8 состоит из корпуса 9, в котором смонтированы гидрозамок 10, обеспеч1шающий безопасность путем запирания рабочей жидкости в полостях гидроцилиндров 5, работающих на сжатие груза при всех вариантах движения лап 4, регулятор давления 11 и управляемые распределительные золотники 12 и 13. Золотники 12 служат для установления варианта движения лап 4 путем изменения тправления потока рабочей жидкоста. На фиг. 1 золотники 12 показаны в положении равномерного (синхронного) движения двух лап 4. Управляемый распределительный золотник 13 служит для включения в работу регулятора давления 11 или для работы на номинальном давлении, развиваемом насосом погрузчика (положение показано на фиг. 1), т.е. для работы при разных усилиях сжатия груза лапами 4. Порционер 7 (делитель) служит для разделения потока жидкости на две равные части (порции), независимо от внешней нагрузки на гидро дипиндры 5, в обоих направлениях, чем достигается равномерност1 (синхронность) движения захватных лап 4 как на сближение (сжатие груза), так и на раздвижение. При различных комбинациях включения двух золотников 12 достигаются следующие варианты движения захватных лапГ равномерное (синхронное) движение двух лап 4 (порционер 7 включен в работу); несинхронное движение двух лап 4 при отклю ченном порционере 7; движение только левой лапы 4 при установле ной в любом положении правой лапы; движение только правой лапы при установлен ной в любом положении левой лапы. При включении золотника 13 достигается раб та при полном, т.е. номинальном, развиваемом насосом погрузчика давлении рабочей жидкости или сниженном, заранее отрегулированном механиком, для перегрузки грузов в слабой таре со сниженным усилием сжатия. Соединение в одном корпусе 9 (гидроблоке 8 гидрозамка 10, регулятора давлеюм 11, золотНИКОВ 12 и 13 позволяет не только существенно упростить систему трубопроводов, но и установить на гидроблок 8 единую панель управленця 14, обеспечивающую наглядность и удобство управления захватом. Гидросистема захвата подключается к гидросистеме погрузчика с помощью трубопроводов 6 Грузозахват работает следующим образом. Перед началом работы водитель погрузчика устанавливает рукоятки 15 гидроблока 8 в положение, соответствующее наиболее рациональному варианту двихсения лап 4 |1ля конкретных условий перегрузки груза. Например, при захвате груза, который имеет размер по щирине, мешше ширит погрузчика, и стоящего у стенки вагона, контейнера или трюма, целесообразно работать одной лапой, обращенной к стенке, а вторую - застопорить в сдвинутом к середине положении. Если предстоит перегрузка в слабой таре, таре, например в бочках, водитель устанавливает рукоятку регулятора давления 16 в положе1ше сниженного усилия сжатия, которое было заранее отрегулировано механиком. Затем, с помощью рукояток гидрораспределителя погрузчика в трубопровод 6 захвата подается рабочая жидкость, под действием которой приводятся в движение захватные лапь 4 (или одна лапа), груз надежно сжимается лапами, и гидрозамок 10 запирает рабочую жидкость в полостях гидроцилиндров 5, работающих на сжатие. После транспортирования груза и установки его на место укладки рабочая жидкость подается в обратном направлении, захватные лашзТ раздвигаются и освобождают груз. Формула изобретения Захватное устройство к погрузчику, содержащее основание с направляющими, в которых расположены ползуны, несущие сме}шые захватные лапы и гидропривод с гидроцилиндрами и трубопроводом,о тличающееся тем,что,с целью расщирения эксплуатационных возможностей, в трубопроводе гидропривода последовательно установлеьп) реверсивный порЩ1онер и гидроблок, содержащий корпус, в котором смонтированы регулятор давления, гидравлгетески соединенный с ним гидрозамок и управляемые распределительные золотшгки. Источники информа1щи, принятые во внимание при экспертизе I. Авторское свидетельство СССР № 286589, кл. В 66 F 9/22, 24. 02. 69.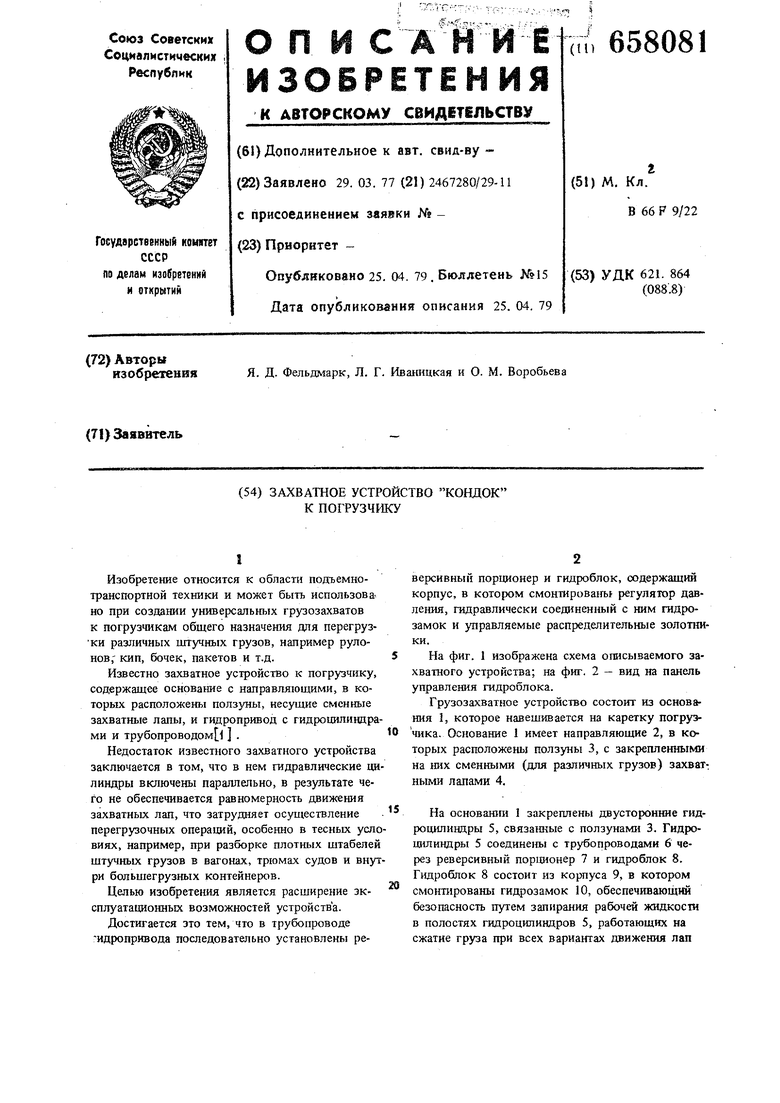
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТ-СТАЛКИВАТЕЛЬ К ПОГРУЗЧИКУ | 1996 |
|
RU2116958C1 |
| Захват для цилиндрических грузов к погрузчику | 1975 |
|
SU537947A1 |
| ГРУЗОЗАХВАТ К ПОГРУЗЧИКУ | 1996 |
|
RU2120401C1 |
| Вибрационная машина | 1973 |
|
SU653338A1 |
| Гидравлическая схема вилочного погрузчика с поворотным механизмом | 2022 |
|
RU2783756C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ЛЮКОВОГО ЗАКРЫТИЯ | 2008 |
|
RU2364542C1 |
| Вилочный захват к погрузчику | 1980 |
|
SU1011496A1 |
| Гидропривод перемещения исполнительного органа горного комбайна | 1978 |
|
SU945424A1 |
| Захват | 1985 |
|
SU1315378A1 |
| Грузозахватное устройство к погрузчику | 1985 |
|
SU1271815A1 |