1
Изобретение относится к подъем-но-транспортному машиностроению, а именно к устройствам для предо твращения перекоса металлоконструкций кранов.
Известно устройство для синхронного перемещения опор мостового крана с пневматическим приводом, содержащее дискретные датчики пути, установленные на равных расстояниях вдоль подкрановых путей, и систему управления пневмоприводом.
Недостатком известного устройства является сравнительно низкая точность, поэтому оно не предотвращает полностью перекос опор и металлоконструкции мостового крана.
Цель изобретения - повышение точности устройства.
Для этого устройство снабжено датчиком величины и «аправления скорости, реверсивным сумматором, дискретным интегратором и сумматорами «вперед и «назад системы управления, причем датчики величины и направления скорости расположены у опор крана, а их выходные каналы перекрестно соединены со входами реверсивного сумматора, выход которого связан со входом дискретного интегратора, при этом В сумматорах «вперед и «назад расположены положительные и отрицательные камеры, один из выходов дискретного интегратора связан С камерами сумматоров «вперед, а другой - с камерами сумматоров
«назад, а полярность камер сумматоров, подключенных к одному выходу дискретного интегратора, противоположна по знаку.
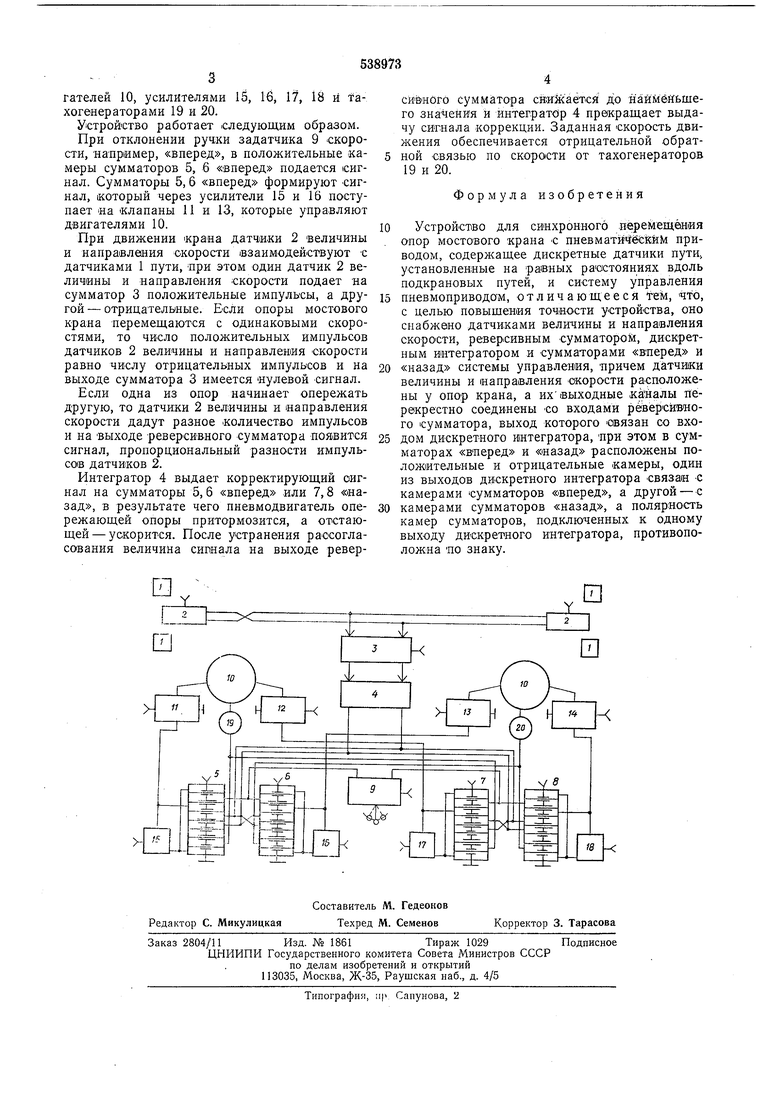
На чертеже изображена блок-схема устройства для синхронного перемещения опор мостового крана с пневматическим приводом и система управления пневмоприводом.
Устройство для синхронного перемещения опор мостового крана € пневматическим приводом содержит дискретные датчики 1 пути, расположенные на ращных расстояниях вдоль подкрановых путей, датчики 2 величины и направления скорости, установленные у опор , реверсивный сумматор 3, дискретный
интегратор 4 и сумматоры 5 и 6 «вперед и 7, 8 «назад, которые снабжены положительными и отрицательными камерами. Выходные каналы датчиков 2 величины и направления скорости перекрестно соединены со входами
сумматора 3, выход которого связан со входом интегратора 4, при этом один из выходов интегратора 4 связан с камерами сумматоров 5, 6 «вперед, а другой-с камерами сумматоров 7, 8 «назад, а полярность камер сумматоров, подключенных к одному выходу интегратора 4, противоположна по знаку.
Система управления пневматическим приводом снабжена ручным задатчиком 9 скорости, пневматическими двигателями 10 опор
мостовогоКрана, клапанами 11, 12, 13, 14 дви
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОГРАНИЧЕНИЯ ПЕРЕКОСА МОСТОВОГО КРАНА | 2012 |
|
RU2502665C1 |
| Ограничитель перекоса мостового крана | 1977 |
|
SU691381A1 |
| Способ определения координат мостового крана | 2021 |
|
RU2767796C1 |
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОСТОВОГО КРАНА | 2009 |
|
RU2405735C1 |
| ОГРАНИЧИТЕЛЬ ПЕРЕКОСА ОПОР КРАНА МОСТОВОГО ТИПА | 1993 |
|
RU2061645C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕДВИЖЕНИЯ С КОРРЕКЦИЕЙ ПОПЕРЕЧНОГО СМЕЩЕНИЯ | 2015 |
|
RU2605233C1 |
| Устройство для измерения величины пути перемещения крана | 1982 |
|
SU1017926A1 |
| Привод механизма перемещения опор мостового крана | 1985 |
|
SU1321661A1 |
| Устройство для управления режимом нагрева многозонной печи | 1983 |
|
SU1137452A1 |
| Устройство для определения положения опоры крана относительно подкранового пути | 1981 |
|
SU971775A1 |
