(54) ОГРАНИЧИТЕЛЬ ПЕРЕКОСА МОСТОВОГО КРАНА

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОСТОВОГО КРАНА | 2009 |
|
RU2405735C1 |
| ОГРАНИЧИТЕЛЬ ПЕРЕКОСА ОПОР КРАНА МОСТОВОГО ТИПА | 1993 |
|
RU2061645C1 |
| Устройство для контроля перекоса мостового крана | 1972 |
|
SU558844A1 |
| СПОСОБ ОГРАНИЧЕНИЯ ПЕРЕКОСА МОСТОВОГО КРАНА | 2012 |
|
RU2502665C1 |
| Стабилизирующее устройство ходовой тележки мостового крана | 1987 |
|
SU1588693A1 |
| Концевая балка мостового крана | 2021 |
|
RU2769375C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕДВИЖЕНИЯ С КОРРЕКЦИЕЙ ПОПЕРЕЧНОГО СМЕЩЕНИЯ | 2015 |
|
RU2605233C1 |
| Узел ходовой части крана | 1991 |
|
SU1794860A1 |
| РЕЛЬСОВАЯ ПОДКРАНОВАЯ КОНСТРУКЦИЯ | 1993 |
|
RU2053187C1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU373244A1 |

Изобретение относится к подъемнотранспортному машиностроению и касается конструктивных устройств для автоматического ограничения перекоса мостового крана.
Известно устройство для автоматического контроля перекоса опор козлового крана, содержащее сельсины-датчики, связанные с ходовыми холостыми колесами крана, и сельсин-приемник, включенный по дифференциальной схеме и соединенный с указательным мех1знизмом, выполненньпи в виде поворотной стрелки, закрепленной на роторе сельсин-приемника и взаимодействующей при недопустимом угле наклона посредством расположенных на ее нижнем конце ролика с микропереключателями привода ходовой части крана l.
Недостаток устройства состоит в не- доста точной точности контроля величины иерекоса, т.е. определения разности пути пройденного противоположными опорами
крана, что приводит к взаимодействию реборд ходовых колес с рельсами.
Наиболее близким из известных решений является ограничитель перекоса мостового крана, содержащий установленные у каждой опоры крана датчики, анализирующие разность пройденного опорами крана пути и состоящие из сигнализатора перекоса с подвижными и. неподвижными контактами, и анализатора перекоса, выполненного в виде индуктивного преобразователя с подвижным сердечником со штоком, сна бженным роликом, взаимодействующим с рельсом .
Недостатком устройства является сложность конструкции. Так,анализатор перекоса вьтолнен в виде цевочного колеса, находящегося в зацеплении с зубчатой рейкой, уложенной вдоль подкранового пути. -В свою очередь цевочные колеса соединены с помощью механической передачи с валами, на которых установлены подвижные контакты сигнализатора перекоса. Такая сложная конструкция в результате наличия кинекотических зазоров не может в полной мере, обеспечить достаточную точность контроля разности пути, пройденного противоположными опора ми крана, что значительно снижает точность контроля и надежность работы ограшгчителя.
Целью изобретения является повышение точности контроля и надежности работы ограничителя.
. Поставленная цель достигается тем, что сердечник снабжен дополнительным штоком с подпружиненньгм упором, а ограничитель снабжен реверсивным переключателем, СОСТО5ПЦИМ из винтового механизма, связанного с упомянутым роликом и взаимодействующего посредством подпружиненного упора с нeпoдвижньnv контактом сигнализатора перекоса, установпенным с возможностью смещения относительно индуктивного преобразователя анализатора перекоса.
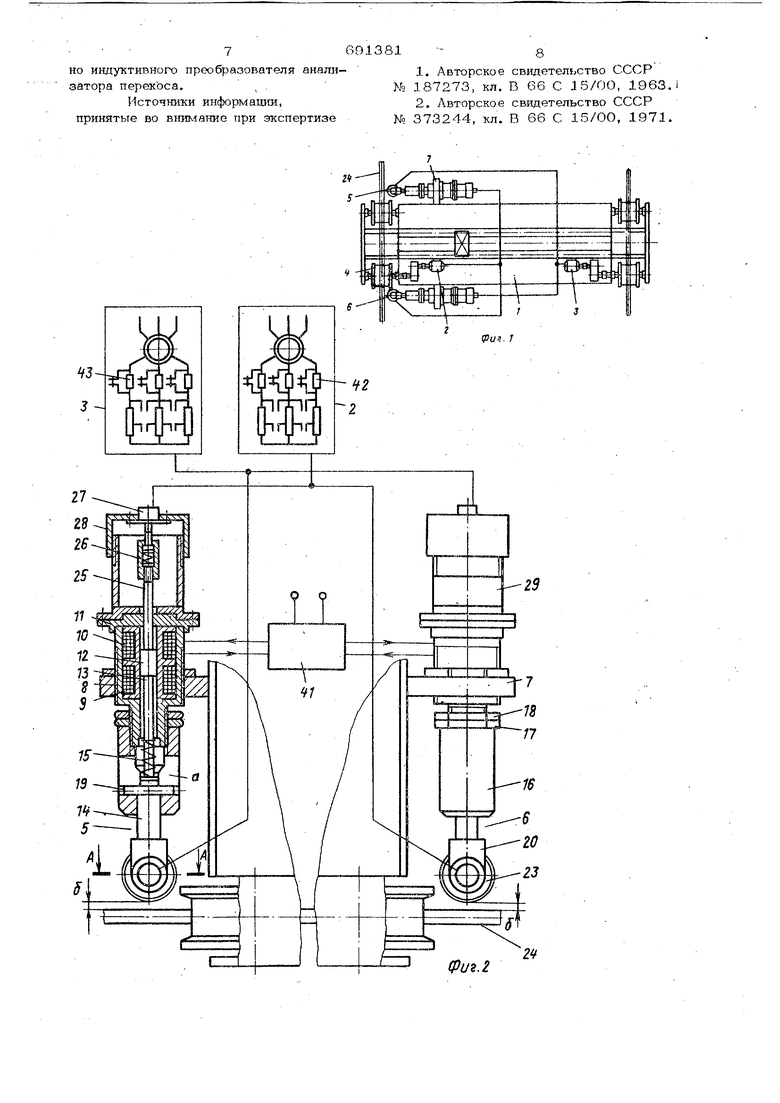
На фиг. 1 изображена схема установки ограничителя перекоса на кране; на фиг. 2 показан ограничитель перекоса мостового крана в плане} на фиг. 3 сечение А-А на фиг. 2; на фиг. 4 - электрическая схема ограничителя перекоса мостового крана.
Ограничитель перекоса содержит мостовой кран 1, у которого механизм передвижения с раздельным приводом включает электродвигатели 2 и 3. У ходовых колес 4, расположенных в общей концевой балке крана 1, установлены датчики 5 и 6, включакадие системы анализаторо и сигнализаторов перекоса крана Л, прикрепленные к нему при помощи кронштейнов 7. Каждый из анализаторов перекоса датчиков 5 и 6 содержит корпус 8 с наружной , в который вставляется индуктивный преобразователь, состоящий из катушки 9с двумя обмотками Ю, навитыми в противоположные стороны. Катушка 9 с наружной стороны закрыта крышкой 11. Внутри катушки 9 перемещается сердечник 12 так, что в среднем положешш он является общим для левой и правой обмоток 10. Сердечник 12 навинчен на шток 13 из антимагнитного материала и соединен с металлическим штоком 14, подпружиненным с помощью пружины 15. Шток 14 проходит внутри головки 16 с пазом а, которая навинчивается на корпус 8 и фиксируется гайками 17 и 18. Ход се эдечника 12 ограничивается штифтом 19, расположенным внутри паза а головки 16. На
691381
койне штока М 4 в вилке 2О на оси 21, укреплегагой в подшипниках 22, установлен роликовый реверсивный переключатель системы сигнализатора перекоса с обрезиненным роликом 23, OTCTOSPJisnvi на величину б, связанную с допустимым перекосом крана 1 относительно рельса 24. С другой стороны в сердечнике 12.ввинчен дополнительный шток 25, на конце
которого установлен подпружиненный упор 26, взаимодействующий с неподвижным контактом 27 системы сигнализатора перекоса, укрепленным в крыш1 е 28, регулируемой относительно стакана 29, прикрепленного к кры11же 11. Ось 21 роли- . кового реверсивного переключателя системы сигнализатора перекоса жестко сое- Д1жена с винтом 30, имеющим левую нарезку и перемещающим гайку 31, снабженную проточкой 32 (для выхода нарезки винта 30) и хвостовиком 33. Гайка 31 подпружинена сверху и снизу пружинами 34 и перемещается по направляющим 35 корпуса 36, прикрепленного к вилке 20. В корпусе 36 вмонтировано кольцо 37, соединенное прзя помощи регулировочных винтов 38 с крышкой 39, в которой установлен переключатель 40, имеющий регулировочный зазор в между кнопкой переключателя 4О и хвостовиком 33 гайки 31. Обмотки 10 катушек 9 системы анализатора перекоса датчиков. 5 и 6 соединены с блоком анализатора перекоса 41, позволяющим вести визуальное наблюдение за величиной перекоса крана 1, производить регуяировку датчиков 5 и 6 и тем самым корректировать в процессе эксплуатации величину б допустимого перекоса крана 1, Система сигнализатора перекоса датчиков 5 и 6 включена в электрическую схему, состоящую из электродвигателей 2 и 3 с дополнительными сопротивлениями соответственно 42 и 43, включенными в цепь роторов электродвигателей 2 и 3 и блока контактов переключателя 4О, включающего замыкающие 44 и размыкающие 45 контакты контакта 27 в виде кнопки с самсвозвратом и размьшающим контактом 46 катушки контактора 47. Причем размыкающие контакты 45 переключателя 4О сигнализатора перекоса датчика 5 и размьпсаюшие контакты 46 контакта 27
датчика 6 включены в электрическую цепь электродвигателя 3, а размыкающие контакты 45 переключателя 40 сигнализатора перекоса датчика 6 и размыкающие контакты 46 контакта 27 датчика 5 включены в электрическую цепь электродвига теля 2. Ограничитель перекоса мостового кра работает следующим образом. Кронштейны 7 с датчиками 5 и 6 кре пятся к металлоконструкции крана 1 у колес 4. Система анализатора перекоса датчиков 5 и 6 подключается к блоку анализатора перекоса 41, а система сиг нализатора перекоса датчиков 5 и б под ключается к электрической схеме электро двигателей 2 и 3, Первоначально сердеч ники 12 датчиков 5 и 6 по показаниям приборов блока анализатора перекоса 41 устанавливают в среднее положение, при этом стрелки приборов находятся на нулевой отметке, В этом положении к блоку анализатора перекоса 41 производится отладка между дополнительным перемещениетл сердечники 12 каждого датчика 5 к 6, соответствующим скорости выхода крана 1 из перекоса, и величиной сопротивления 42 и 43 г. цепи роторов электродвигателей 2 и 3. Это соотношен должно находиться в пределе, не допуска ющем взаимодействие реборд колес 4 с рельсами 24,. что на приборах блока анализатора перекоса 41 отмечено в виде границы дополнительного перемещения крана. Если зазоры между ребордами колес 4 с обеих сторон рельсов 24 одинаковые, то величина б, устанавливаемая между роликами 23 каждого датчика 5 и 6 и рельсом 24, также одинаковая. Если кран 1 перекошен, то положение датчиков 5 и 6 с учетом величины б определяется соответствующим перераспределением зазоров между ребордами колес 4 и рельсом 24, При движении кран 1 может принимат различные положения. Принимаем движение вперед - в сторону приводных колес 4, движение назад - в сторону холостых колес 4, Например, при движении вперед кран 1 повернут по часовой стрелке и ролик 23 датчика 6, взаимодействуя с рельсом 24, вращается по часовой стрел ке. При этом гайка 31 занимает нижнее положение. Одновременно упор 26 наткимает на контакт 27, Тогда контакт 46 размыкается и катушка контактора 47 отключает в цепи электродвигателя 3 размыкающие силовые контакты, вводя сопротивления 43, что приводит к умеиьшению скорости электродвигателя 3 и вьфавниванию крана 1. При этом гежду роликом 23 датчика в и рельсом 24 образуется зазор, контакты 46 замьпсаются и сопрот1юления 43 выводятся из цепи электродвигателя 3, который переходит на нормальный режим, Если из положения вперед кран 1 движется назад, то ролик 23 датчика 6 вращается против часовой стрелки. Гайка 31 поднимается на переключатель 40, у которого контакт 44 замыкается, а контакт 45 размыкается. Контакт 4в датчика 5 замкнут. Тогда катушка контактора 47 электродвигателя 3 выводит сопротивление 43, а в цепи двигателя 2, у которого цепь сигнализатора перекоса датчика 5 разомкнута, катушка контактора 47 обесточивается, чтб вводит сопротивление 42 в цепь электродвигателя 2, Это приводит к замедлению скорости забежавшей ,: стороны и выравниванию крана 1, При перекосе крана 1 против часовой стрелки вступает в работу датчик 5, Дальнейший порядок срабатывания механической и электрической схем ограничителя перекоса мостового крана с учетом направления перекоса и движения крана аналогичный, Таким образом, устраняется взаимодействие реборд ходовых колес с подкрановыми рельсами, В результате повышается срок рлужбы ходовых колес, рельсов и подкрановых балок. Формула изобретения Ограничитель перекоса мостового крана, содержащий установленные у каждой опоры крана датчики, анализирующие разность пройденного опорами крана пути и состоящие из сигнайиэатора перекоса с подвижньши и неподвижными контактами, и анализатора перекоса, вьтолйенного в виде индутктивног б преобразователя с подвижным сердечником со штоком, снабженным роликом, взаимодействующим с с рельсом, о т л и чаю щи и с я тем, что, с целью повышешш точности контроля и надежности работы ограничителя, сердечник снабжен дополнительным штоком с подпружиненньпу упором, а ограничитель снабжен реверсивным переключателем , состоящим из еинтов ого механизма, связанного с упОмянуть1м роликом и взаимодействующего посредством подпружиненного упора с неподвижным контактом сигнализатора пфшбйа установленаым с возможностью сметдення относитель7691381но индутстивного преобразователя анализатора перекоса, , № Источники информащш, принятые во вниманио при экспертизек
(puz.Z -8 1. Авторское свидетельство СССР 187273, кл. В 66 С 15/ОО, 1963. i 2. Авторское свидетельство СССР 373244, кл, В 66 С 15/ОО, 1971.
38
W 7
(ftu.3
