1
Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для определения положения опоры крана и может быть использовано для определения перекоса металлоконструкции крана. Наиболее близким к предлагаемому по техническому решению является устройство для определения положения опоры крана относительно подкранового пути, содержащее сельсин-датчики, связанные с блоком определения положения опоры крана и смонтированные в корпусах, установленных на металлоконструкции крана, причем сельсиндатчики кинематически связаны с рычагами, на которых установлены ролики,сопряженные с головкой рельса пути, а также пружины, соединенные с корпусами, и зубчатые передачи 1.
Недостатком известного устройства является сравнительно низкая точность измерения положения опоры крана.
Цель изобретения - повышение точности измерения положения опоры крана.
Указанная цель достигается тем, что устройство снабжено вертикальными валами, установленными в корпусах и соединенными зубчатой передачей с роторами сельсин-датчиков, и шкивами, установленными на валах и роторах сельсин-датчиков и соединенными с пружинами, а каждый рычаг закреплен на соответствующем вертикальном валу.
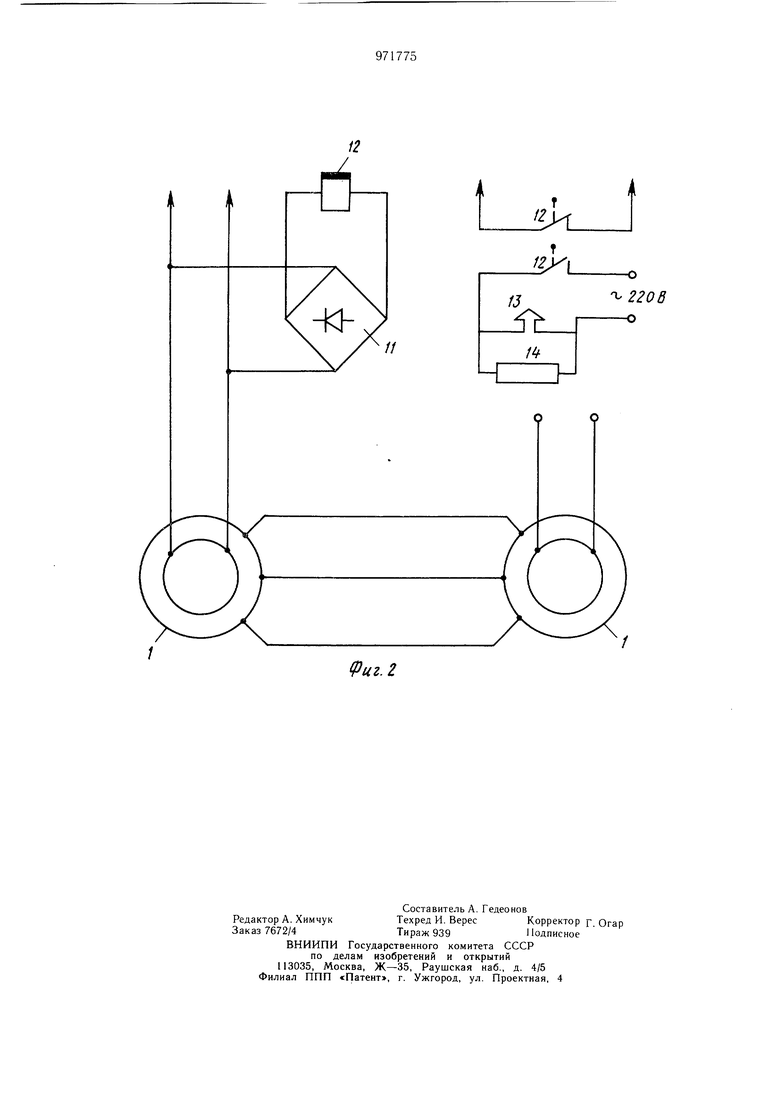
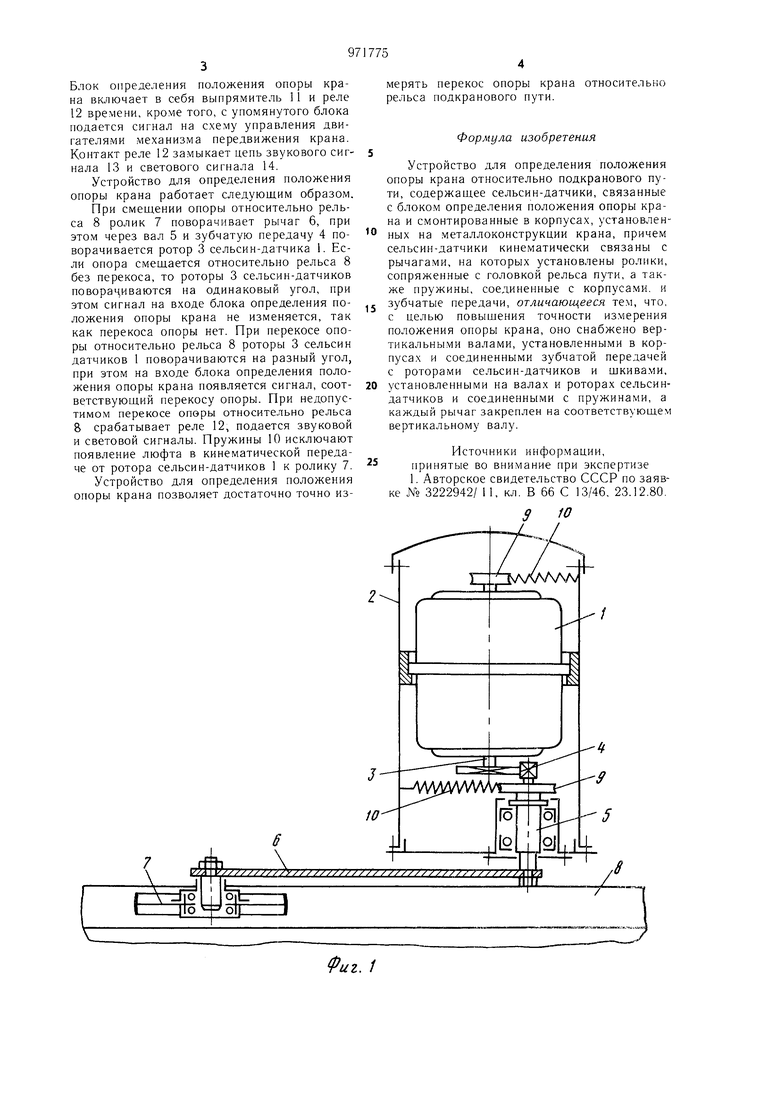
На фиг. 1 схематически изображено устройство для определения положения опоры крана относительно подкранового пти. общий вид; на фиг. 2 - электрическая схема устройства.
Устройство для определения положения опоры крана относительно подкранового пу10ти содержит сельсин-датчики 1, установленные в корпусах 2, закрепленных на металлоконструкции крана (на опоре крана). Ротор 3 сельсин-датчика 1 через зубчатую передачу 4 и вертикальный вал 5 соединен с рычагом 6, несущим ролик 7, сопряженный с
15 головкой рельса 8 подкранового пути. На валу 5 и роторе 3 сельсин-датчика 1 установлены шкивы 9, соединенные посредством пружин 10 с корпусом 2. К обмотке ротора одного из сельсин-датчиков 1 подведено пе20ременное напряжение, обмотки статоров сельсин-датчиков 1 соединены друг с другом, а с обмотки ротора другого сельсин-датчика 1 снимается напряжение, пропорциональное перекосу опоры крана относительно рельса 8.
Блок определения положения опоры крана включает в себя выпрямитель 11 и реле 12 времени, кроме того, с упомянутого блока подается сигнал на схему управления двигателями механизма передвижения крана. Контакт реле 12 замыкает цепь звукового сигнала 13 и светового сигнала 14.
Устройство для определения положения опоры крана работает следующим образом. При смещении опоры относительно рельса 8 ролик 7 поворачивает рычаг 6, при этом через вал 5 и зубчатую передачу 4 поворачивается ротор 3 сельсин-датчика 1. Если опора смещается относительно рельса 8 без перекоса, то роторы 3 сельсин-датчиков поворачиваются на одинаковый угол, при этом сигнал на входе блока определения положения опоры крана не изменяется, так как перекоса опоры нет. При перекосе опоры относительно рельса 8 роторы 3 сельсин датчиков 1 поворачиваются на разный угол, при этом на входе блока определения положения опоры крана появляется сигнал, соответствующий перекосу опоры. При недопустимом перекосе опоры относительно рельса & срабатывает реле 12, подается звуковой и световой сигналы. Пружины 10 исключают появление люфта в кинематической передаче от ротора сельсин-датчиков 1 к ролику 7. Устройство для определения положения опоры крана позволяет достаточно точно измерять перекос опоры крана относительно рельса подкранового пути.
Формула изобретения
Устройство для определения положения опоры крана относительно подкранового пути, содержащее сельсин-датчики, связанные с блоком определения положения опоры крана и смонтированные в корпусах, установленных на металлоконструкции крана, причем сельсин-датчики кинематически связаны с рычагами, на которых установлены ролики, сопряженные с головкой рельса пути, а также пружины, соединенные с корпусами, и зубчатые передачи, отличающееся тем, что. с целью повышения точности измерения положения опоры крана, оно снабжено вертикальными валами, установленными в корпусах и соединенными зубчатой передачей с роторами сельсин-датчиков и щкивами,
установленными на валах и роторах сельсиндатчиков и соединенными с пружинами, а каждый рычаг закреплен на соответствующем вертикальному валу.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 3222942/ 11, кл. В 66 С 13/46, 23.12.80.
иг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель перекоса мостового крана | 1977 |
|
SU691381A1 |
| Устройство синхронизации механизмов передвижения крана | 1979 |
|
SU897700A1 |
| Устройство для управления приводами передвижения опор крана мостового типа | 1982 |
|
SU1087453A1 |
| ОГРАНИЧИТЕЛЬ ПЕРЕКОСА ОПОР КРАНА МОСТОВОГО ТИПА | 1993 |
|
RU2061645C1 |
| Устройство для рихтовки железнодорожного пути | 1978 |
|
SU779488A1 |
| Устройство для измерения величины пути перемещения крана | 1982 |
|
SU1017926A1 |
| СПОСОБ ОГРАНИЧЕНИЯ ПЕРЕКОСА МОСТОВОГО КРАНА | 2012 |
|
RU2502665C1 |
| Устройство для управления гидроприводами механизмов передвижения крана мостового типа | 1980 |
|
SU901241A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПАПИЛЬОНИРОВАНИЯ ЗЕМЛЕСОСНОГО СНАРЯДА С НАПОРНЫМ СВАЙНЫМ ХОДОМ | 1969 |
|
SU242761A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАЗДЕЛЬНЫМИГИДРОПРИВОДАМИ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯМОСТОВОГО КРАНА | 1971 |
|
SU424802A1 |