1
Изобретение может быть использовано при разработке высокоточных частотно-регулируемых замкнутых электроприводов на базе синхронных редукторных двигателей.
Известен частотно-регулируемый электропривод с ши отно-импульсной модуляцией, содержащий трехфазный мостовой инвертор на тиристорах и устройство управления с тремя регулируемыми по частоте мультивибраторами 1. Однако он имеет сложную систему управления и .недостаточно надел ен в работе.
Известно применение датчиков с электромагнитной редукцией 2. Однако эти датчики не являются точным аналогом исполнительного синхронного редукторного двигателя, что повышает вероятность внесения ошибок сам.им датчиком из-за неиндентичности протекающих процессов.
Наиболее близким по технической сущности к предлагаемому является чЭСтотно-регулируемый электропривод, содержащий блок управления, выход которой через последовательно соединенные преобразователь напряжение - частота и синхронный редукторный двигатель связан с объектом регулирования, датчущ обратной связи, установленный на валу двигателя, сумматор, входы которого подсоединены к выходам задатчика угла и датчика обратной связи, и задатчик скорости 3.
Недостатки такого электропривода: привод не зам-кнут по углу; привод не управляется в.ходным воздействием по любому закону; при использовании редукторных двигателей в качестве исполнительных между двигателем и сельсином, выполняющим роль задатчика угла, необходимо ставить механический редуктор с передаточным числом, равным коэффициенту редукции двигателя, что значительно снижает точность данного датчика.
Цель изобретения - повыщение точности привода. Это достигается тем, что в предлагаемый
электропривод дополнительно введены второй сумматор, три ключа, пороговое устройство, фильтр НИЗКОЙ частоты, датчик угла поворота вала двигателя, измеритель разности фаз, при этом выход первого сумматора связан с входами второго сумматора и порогового устройства, выход задатчика скорости подключен к входам третьего ключа и второго сумматора, выход которого подсоединен через фильтр низкой частоты к входу блока управления, вы.ходы порогового устройства связаны с входами ключей, входы измерителя разности фаз подключены к выходам преобразователя напряжение - частота и датчика утла поворота вала двигателя, выход измерителя
разности фаз подсоединен к входу второго
ключа, выходы второго и третьего ключей связаны с входами блока управления.
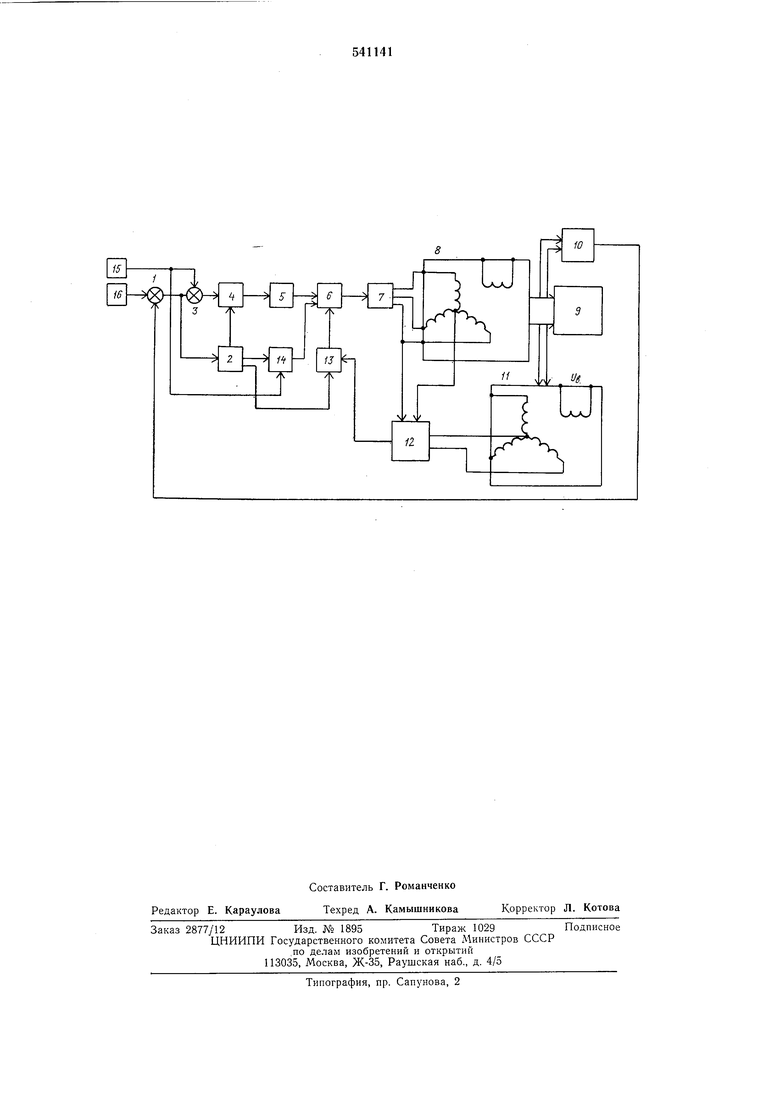
На чертелсе представлена блок-схема предлагаемого двухканального частотно-регулируемого электропривода.
Электропривод содержит первый сумматор 1, пороговое устройство 2, второй сумматор 3, первый ключ 4, фильтр 5 низкой частоты, блок 6 управления, преобразователь 7 напряжение- частота, синхронный редукторный двигатель 8, объект регулирования 9, датчик 10 обратной связи, датчик 11 угла поворота вала двигателя, измеритель 12 разности фаз, второй ключ 13, третий ключ 14, задатчик скорости 15, задатчик угла 16.
Двухканальныйчастотно-регулируемый
электропривод работает следующим образом.
При большом сигнале ра-ссогласования по углу на выходе первого сумматора 1 («а вход привода подан скачок или двигатель выпал из синхронизма) пороговое устройство 2 находится в таком положении, что ключ 4 открыт, а ключи 13 и 14 закрыты.
Управляющий сигнал с выхода второго сумматора 3, равный сумме сигнала по скорости и сигнала ошибки по углу, проходит ключ 4, фильтр 5 низкой частоты и поступает в блок б управления преобразователем 7 напряжение-частота.
Фильтр 5 низкой частоты предназначен для того, чтобы сглаживать скачки управляющего сигнала до допустимой для двигателя величины.
Управляющее напряжение с преобразователя 7 напряжение - частота, регулируемое по частоте и амплитуде, подается на управляющую обмотку синхронного редукторного двигателя 8, с валом которого жестко связаны объект регулирования 9, датчик 10 обратной связи по углу и датчик 11 угла поворота вала двигателя.
Датчик 11 конструктивно представляет собой точную копию исполнительного двигателя, но предназначен для измерительных целей, и поэтому выполнен в меньших габаритах.
В данном приводе используется только одна фаза трехфазной обмотки датчика, однако при применении двигателей двойного питания в качестве исполнительных используются все три фазы обмотки.
Когда двигатель 8 находится в синхронном режиме, сигнал ощибки по углу на выходе первого сумматора 1 значительно уменьшается и пороговое устройство 2 переключается так, что ключ 4 закрывается, а ключи 13 и 14 открываются.
В этом режиме за счет момента объекта регулирования 9 на валу двигателя 8 образуется сдвиг фаз между напряжением управляющей обмотки двигателя 8 и напряжением, снимаемым с трехфазной обмотки датчика 11 угла.
Данный сдвиг фаз, пропорциональный моменту, измеряется измерителем 12 разности фаз и далее через ключ 13 управляет фазой работы блока 6 управления. Управляющий сигнал по скорости через ключ 14 подается в блок 6 управления и определяет частоту и амплитуду напряжения, питающего двигатель. Таким образом, в данном электроприводе можно выделить два канала: грубый, служащий для отработки больших рассогласований по углу; точный, служащий для стабилизации угла нагрузки в синхронном режиме вращения. Технико-экономический эффект от предлагаемого изо-бретения заключается в получении возможности отработки любых входных воздействий частотно-регулируемым приводом, а также в повышении точности измерения угла нагрузки при использовании синхронных
редукторных двигателей.
Формула изобретения
Двухканальныйчастотно-регулируемый
электропривод, содержащий блок управления, выход которого через последовательно соединенные преобразователь напряжение - частота и синхронный редукторный двигатель
связан с объектом регулирования, датчик обратной связи, установленный на валу двигателя, первый сумматор, входы которого подсоединены к выходам задатчика угла и датчика обратной связи, и задатчик скорости,
отличающийся тем, что, с целью повышения точности привода, он содержит второй сумматор, три ключа, пороговое устройство, фильтр низкой частоты, датчик угла поворота вала двигателя, измеритель разности фаз,
при этом выход первого сумматора связан с входами второго сумматора и порогового устройства, выход задатчика скорости подключен к входам третьего ключа и второго сумматора, выход которого подсоединен через
фильтр низкой частоты к входу блока управления, выходы порогового устройства связаны с входами ключей, входы измерителя разности фаз подключены к выходам преобразователя напряжение -частота и датчика угла поворота вала двигателя, выход измерителя разности фаз подсоединен к входу второго ключа, выходы второго и третьего ключей связаны с входами блока управления.
Источники информации, принятые во внимание при экспертизе:
1.Авт. св. СССР № 197743, кл. Н 02Р 5/38, 1969.
2.Бродовский В. Н., Иванов Е. С. Приводы с частотно-токовым управлением. М., «Энергия, 1974.
3.Авт. св. СССР № 216836, кл. Н 02К 29/02, 1967 (прототип). / А-т
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1988 |
|
SU1656652A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| Частотно-регулируемый асинхронный электропривод для испытательного стенда двигателей | 1984 |
|
SU1203682A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Электропривод с частотно-токовым управлением | 1983 |
|
SU1111243A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Управляемый электропривод | 1983 |
|
SU1144201A1 |