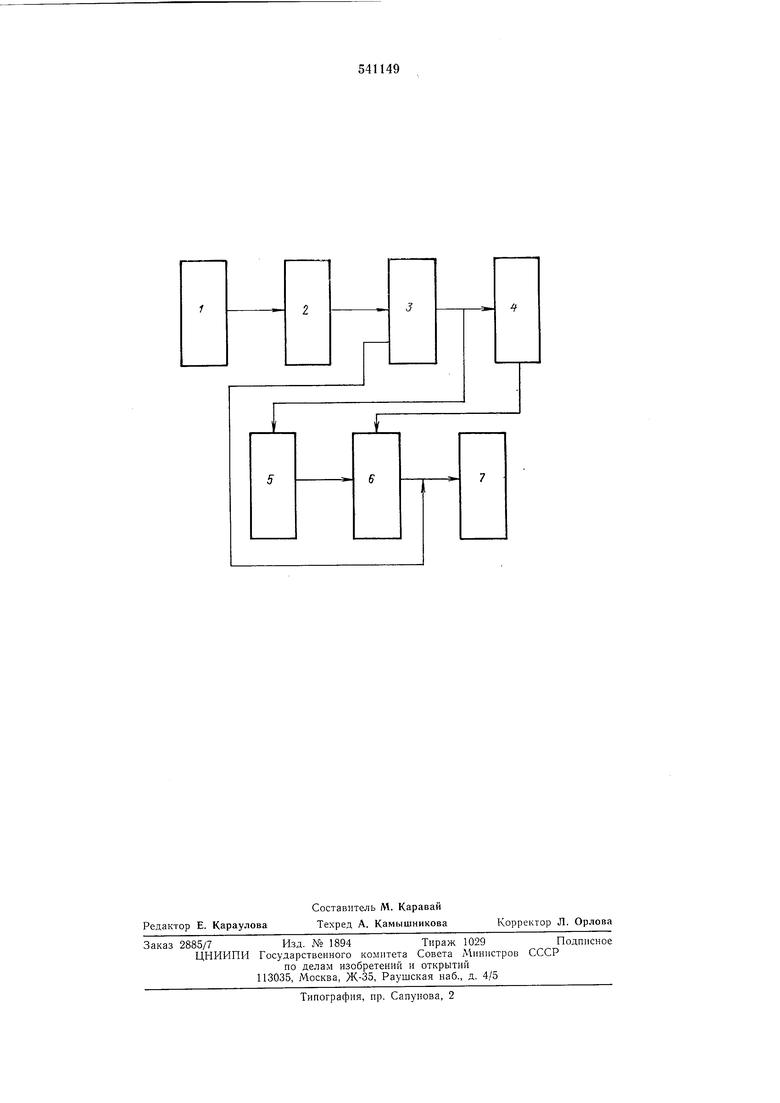
вектора-реализации 1, блок контроля 2, блок вычисления апостериорных вероятностей 3, блок выделения максимальной апостериорной вероятности 4, блок суммирования апостериорных вероятностей 5, блок принятия решения 6, блок фиксации аварийных состояний 7.
Устройство работает следующим образом.
Значения параметров в аналоговой форме подаются на вход блока 1. С выхода блока 1, представляющего собой преобразователь напряжение-цифра, сигналы поступают в блок контроля 2, который, в случае обнаружения отклонения параметров контролируемого объекта от нормы, посылает сформированную блоком 1 вектор-реализацию в блок 3, вычисляющий по схеме Байеса апостериорные вероятности заданного алфавита классов, начиная с первого. С выходов блока 3 полученное значение апостериорной вероятности переносится в блоки 4 и 5 В блоке 4 производится выделения максимальной апостериорной вероятности Я(Лд/Ь,-)макс- В блоке 5 производится процедура суммирования вычисленных апостериорных вероятностей
P(Aijbj). ЗначенияЯ(Лд/&)„акс и
1 l k
2P(AiJbj} переносятся в блок 6, осущестi i
вляющий проверку условия
1-2Я(Лг/&)я(Л,. (1)
г 1
При выполнении этого условия в блок 3 из блока 6 подается команда на вычисление следующей по порядку апостериорной вероятности, и описанная выше процедура повторяется до тех пор, пока условие (1) не будет нарушено. В этом случае блок 6 принимает решение прекратить дальнейшее вычисление апостериорных вероятностей и подает сигнал в блок 7, по которому фиксириуется индекс класса аварийного состояния, к которому отнесена данная авария.
Таким образом, данное устройство производит выделение максимальной апостериорной вероятности и фиксацию индекса класса
аварийного состояния, не вычисляя в большинстве случаев апостериорные вероятности алфавита классов.
Применение данного устройства позволяет сократить время распознавания аварийных состояний объекта в пределе до интервала, необходимого для распознавания одного класса из заданного алфавита. Сокращение времени распознавания позволяет, в свою очередь, принимать оперативные оптимальные решения о воздействии на аварийный объект в реальном масштабе времени до настунления необратимых изменений объекта.
15
Формула изобретения
Устройство для распознавания аварийных состояний объекта контроля, содержащее последовательно соединенные блок формирования вектора-реализации, блок контроля, блок вычисления апостериорных вероятностей, блок выделения максимальной апостериорной вероятности и блок фиксации аварийных состояний, отличающееся тем, что, с целью сокращения времени распознавания, в него введены блок суммирования апостериорных вероятностей и блок принятия решепия, входы которого соединены с выходом блока суммирования апостериорных вероятностей и
выходом блока выделения максимальной апостериорной вероятности, а выход - с входом блока фиксации аварийных состояний и входом блока вычисления апостериорных вероятностей, выход которого подсоединен к входу
блока суммирования апостериорных вероятностей.
Источники информации, принятые во внимание при экспертизе:
1.Авт. св. СССР № 261780, кл. G 06F 15/46, 1968.
2.Патент ФРГ №1175471, кл. 42т5 9/16, 1960.
3.Патент США №3178688, кл. 340-146.3, 1962.
4. Фу К. Последовательные методы в распознавании образов и обучении машин. М., «Наука, 1971, с. 26.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распознавания аварийных состояний объектов контроля | 1978 |
|
SU723516A1 |
| ОДНОПОЗИЦИОННЫЙ ПАССИВНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС ДЛЯ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНЫХ КООРДИНАТ, ЭЛЕМЕНТОВ ДВИЖЕНИЯ ЦЕЛИ И КОЭФФИЦИЕНТА КИЛОМЕТРИЧЕСКОГО ЗАТУХАНИЯ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ЦЕЛИ | 2014 |
|
RU2586078C2 |
| ВЫЧИСЛИТЕЛЬНО ЭФФЕКТИВНОЕ МНОГОКЛАССОВОЕ РАСПОЗНАВАНИЕ ИЗОБРАЖЕНИЙ С ИСПОЛЬЗОВАНИЕМ ПОСЛЕДОВАТЕЛЬНОГО АНАЛИЗА НЕЙРОСЕТЕВЫХ ПРИЗНАКОВ | 2019 |
|
RU2706960C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| СПОСОБ КЛАССИФИКАЦИИ ИЗОБРАЖЕНИЙ | 2020 |
|
RU2756778C1 |
| ОПТИЧЕСКОЕ РАСПОЗНАВАНИЕ СИМВОЛОВ ПОСРЕДСТВОМ ПРИМЕНЕНИЯ СПЕЦИАЛИЗИРОВАННЫХ ФУНКЦИЙ УВЕРЕННОСТИ, РЕАЛИЗУЕМОЕ НА БАЗЕ НЕЙРОННЫХ СЕТЕЙ | 2018 |
|
RU2703270C1 |
| СПОСОБ ЦИФРОВОЙ АДАПТИВНОЙ ФИЛЬТРАЦИИ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2001 |
|
RU2237965C2 |
| Устройство для контроля технических объектов | 1977 |
|
SU734726A1 |
| РАСПОЗНАВАНИЕ СОБЫТИЙ НА ФОТОГРАФИЯХ С АВТОМАТИЧЕСКИМ ВЫДЕЛЕНИЕМ АЛЬБОМОВ | 2020 |
|
RU2742602C1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |