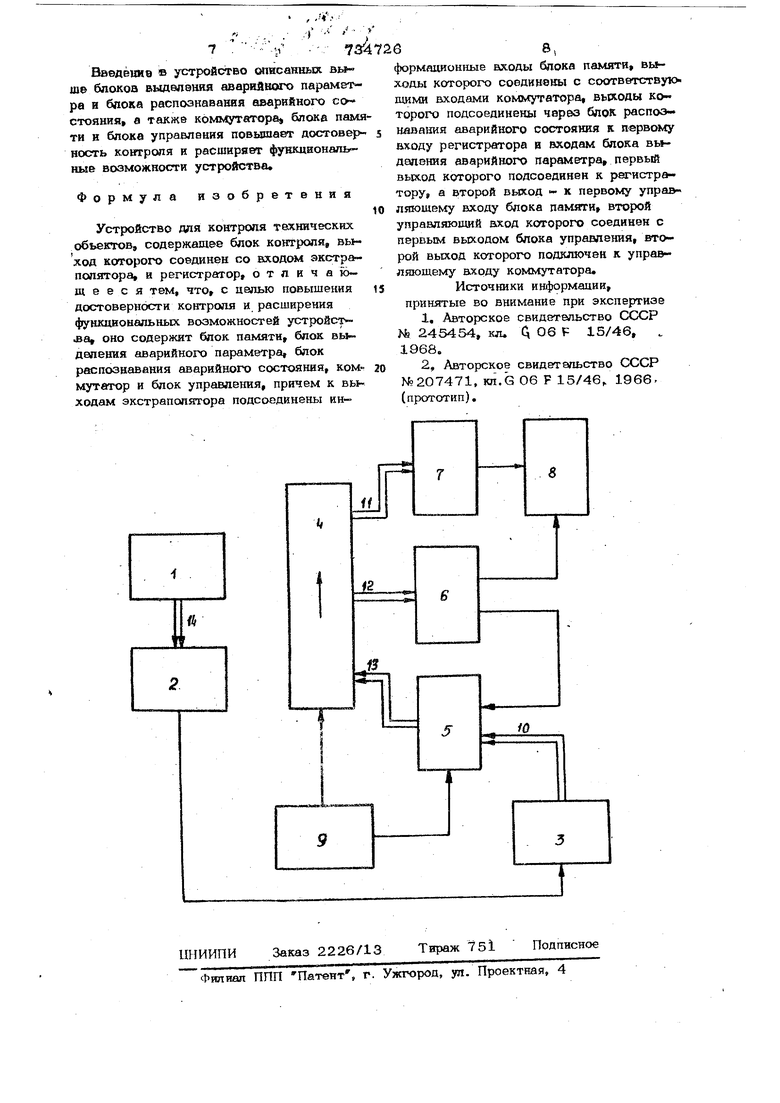
Изобретение относится к вычислительной технике и автоматике и может быть использовано в адаптивных системах классификации, опознавания, диа1 ностики, идентификации, прогнозирования и управления. Известно устройство для контроля па раметров, содержащее датчики, блоки уставок и блоки сравнения, которые сое динены через масштабирующий блок с вы ходом переключателя, один вход которого подключен к регулируемому источнику сигнала, а второй - к источнику пери одически изменяющегося сигнала. Это устройство позволяет оценивать степень близости текущего значения параметра к его аварийным значениям ij« Недостатками устройства являются: «угсутствие вывода информации о предполагаемой степени тяжести аварии, низ кое быстродействие, обусловленное его схемной реализацией, и ограниченная область применения. Наиболее близким к изобретению по технической сущности является устройство для автоматического контроля, содержащее экстрапопятор, вход которого подключен к выходу системы обегающего коигроля, а выход - к одному из входов блока вычисления вероятностибезотказной работы кот-ролируемого элемента, и через схему задержки - к одному из входов блока вычисления дисперсии предсказания, второй вход которого соединен с выходом системы обегающего контроля, а выход - со вторым входом блока вычисления вероятности, третий вход которого подключен к выходу системы обегающего контроля, а выход соединен с регистрирующим устройством 2Г}. Недостатком этого устройства является низкая надежность конггропя по обобщенному (определяющему) парамет ру, что значительно снижает возможность его эффективного использования ОЛЯ ряда специфических производств, например при опредапении степени и при3чин аварийности при управлении потен циапьно опасными процессами химических производств. Цель изобретения повышение досто верности контроля состояния объекта и расширение его функциональных возможностей за счет выявления наиболее опас ного, с точки зрения аварийности aceix) объекта в целом, параметра. Поставленная цель достигается тем, что устройство снабжено блоком памяти, бЛоком выделения- аварийного параметра, блоком распознавания аварийного состояния, коммутатором и блоком управления, причем вькоды блока памяти соединены с соответствующими входами коммутатора, выходы которого соединены соответственно со входами блока рас познавания аварийного состояния, выход которого соединен с регистратором, и блока вьздеяения аварийного параметра, один выход которого соединен со входом регистратора, а другой - с управляющим входом блока памяти, аходы которого подсоединены к экстрапопятору и блоку управления, другой выход которого соединен с коммутатором На чертеже показана блок-схема уст ройства, которая содержит объект 1 управления, блок 2 контроля, служащий для коммутации контролируемых параметров, характеризующих состЬя1ете .объекта управления, экстраполятор 3, предназначенный для отнесения всех из- мерений состояния объекта к единому м менту времени, коммутатор 4, осуществляющий функцию связи блоков устройства, блок 5 памяти для хранения п -мер ного вектора текущего состояния объекта, блок 6 выделения аварийного параметра, предназначенный для определения наиболее потенциально опасного парам8т ра, блок 7 распознавания аварийного состояния, классифицирующий состояние объекта управления, регистратор 8, служащий для вьщачи . результата в цифровой форме и блок 9 управления, управляющий работой устройства. Позициями 1О-14 на чертеже указаны входные и выходные щины cooтвeт ствуюших блоков устройства, Экстраполятор 3, в связи с тем, что параметры, характеризующие состояние объекта, опрашиваются в различные моменты времени iij-fj O Vto где Т время начала опроса -ого цикла, а 1-0 интервал опроса отдельных параметров, осуществляет отнесение всех 6 измерений состояния объекта к единому моменту времени. Это достигается путем экстраполирования отдельных переменных на различные И1ггервалы времени, при этом среднюю длину интервала экстраполяции контролируемых параметров можно определить как уСРеан.А ЭКСТР. ПД . где tЭКСТР. длина интервала экстраполяции параметра; при этом очевидно, ЧТО кор экс. t,p t;,- , Взяв в качестве средней длины интервала экстраполяции время полного цикла опроса п датчиков I Tf- T-n-t Л получим, что t V T-i.V о 2 а о. ЭКСТР. о 4Kc.(4)-4. а точка отсчета, к которой экстраполируются все параметры, соответственно равна i..t - j 2 2 о Реализованный в блоке 6 принцип выявления аварийного параметра аналитически состоит в следующем. Пусть имеется два класса режимов технологического процесса: 3 нормальные режимы,эталон (,-,), Ъ - - предаварийные режимы эталон / V-jv.Vf ...,У) . Вектор состояния Vj (y iVj-j,.-,)B момент времани tj T(j4-1/2}т-у2- о поступает с объекта, изменяя тем самым координаты центроида У класса за счет сглаживания предыстории нормальных режимов; в качестве метода сглаживания исполь зуется алгоритм экспоненциального сглаживания Р. Брауна: ()(. Определим изменения расстояния Т) между эталонами и по сравнению с расстояниями D j от центроида класса предаварийнък состояний объекта до проекций П -мерной точки J fvv,V) на соответствующие ортог{ нальные направления ji ( i 1,2,,.. n). Эти расстояния определяются по формуле х D-Dp -D - b(y.-V(v.;-2vf-vy«), Величины у.; характеризуют степень варийности объекта по i -ому парамету. В качестве аварийного выбирается араметр с таким номером, для которого
соответствующая степень аварийности объекта больше.
Работа предлагаемого устройства осуществляется в следующей последовательности.
В первом цикле опроса в результате экстраполящии к моменту времени Т .T-V2t-to где Т - время ; начала первого цикла; Т-n-t, - время полного цикла опроса; to интервал опроса отдельных параметров j п - количество параметров, характеризующих работоспособность объекта, производится заполнение вектора состояний работы объекта
4,(VJ. 2 ;-- MV° ° ® которого
V, представляют собой значение параметров С -,/, в моменты времени , i;,i- (Vl-n-i
Работа устройства в первом цикле осуществляется в два такта и заключается в следующем:
в первом такте информация о значении параметров Y-,. контролируемого объекта 1 в момент времени ;.Тл(- }4 1через блок 2 контроля поступает на экстраполятор 3, в котором формируются значения V-Д ,отнесенные к моментам времени -t, 1-,.д (i/ -n-i V) )
во втором такте с выхода зкстраполятора 3 вычисление значения V; поступают в блок 5 памяти для хранения т&кущего вектора состояния работы объекта V .
Во втором и последующих циклах опроса производится непосредственная оценка возможного изменения режима и выявление аварийного параметра Ниже описывается (j +1)-ый цикл.
В первом такте ( j +1)-ого цикла в соответствии с выше описанной работой устройства в первом такте первого цикла производится вычисление . составляющих вектора ; . Одновременно в этом же такте С блока 5 памяти вектор J поступает через коммутатор 4 на нход блока 6 вьщеяения аварийного параметра.
Во втором такте ь соответствии с выходным сигналом с блока 6 аварийный параметр через экстраполятор 3 записывается в соответствующую ячейку блока 5 памяти, где формируется новый вектор
.; у -v V V Ti (, , 2J,. V. nj/,
который в третьем такте через коммутатор 4 поступает на вход блока 7 респознаваниЯр где реализуется сигнал о режн-
:ме работы объекта. Сигнал о режиме работы объекта, а также информация об аварийном параметре регистрируются на цнфропечатающем устройстве регистратора 8.
Основной цикл опроса завершается четвертым тактом, в котором параметры ij ( ) вычисленные в первом так.те, с экстраполятора 3 записываются в блок 5 памяти, образуя новый вектор состояния Yj . г,
EinoK 6 выделения 1варийного параметра состоит из двух подблоков, первый из которых реализует следуюнщй алгоритм определения степени влияния параметра на возникновение потенциальной опасности:
X.D- (),
где Xj - выходной сигнал, характеризующий степень аварийности объекта по -ому параметру:
V- - -ая компонента п -мерного вектора-эталона класса рабочи-х режимов объекта
,..,,
S- - -ая компонента п -меу кого вектора-эталона класса аварийных режимов робъекта r (v;,y,,...,
D-u, V р расстояние между соответ ствующими векторами
экспоненциально усреднёнv(A-)-Mtj ное значение -ой компоненты вектора состояния объекта f ; J - номер такта работы устройства- коэффициент экспонешшал Hot%) сглаживания..
Второй подблок блока 6 представляет из себя известное устройство вьщапэ1тя сигнала с максимальнъгм уровнем.
В блоке 7 распознавания аварийного состояния реализуется решающая функция
авария, ,
(S.b опасность, к,RO ,5 норма, ,
где RO -радиус RO -окрестности
л -мерной точки ; , - коэффициет-ы, классифицирующие текущее состояние объекта и определяемые из соотном
шенийч
,.V-K,v...,v;).
, .«, Введеиив в устройство описанных вь ше блоков вьшвпбняя аварнвыого параметра и бдока распознавания аварийного состояния, а также коммутатора блока пам ти и блока управления повышает достове{ ность контроля и расширяет фуЕкционапьные возможности устройства. Формула яэобретеняя Устройство для контроля технических объектов, содержащее блок контроля, вьь ход которого соединен со входом экстрапопятора, и регистратор, о т л и ч а ib- щ е е с я тем, что, с цепью повышения достоверности контроля и расширения функциональных возможностей устройства, оно содержит блок памяти, блок выделения аварийного параметра, блок распознавания аварийного состояния, ком мутатор и блок управлв|гая, причем к вьь ходам экстрапопятора подсоединены ин4726
8, формационные входы блока памяти, выходы которого соединены с соотввтствук щкми входами коммутатора, выводы которого подсоединены через блок распознавания аварийного состояния к первому ькоду регистратора и входам блока вььдапания аварийного параметра, первый вькод которого подсоединен к регистратору, а второй выход к первому управлотошему входу блока памяти, второй управляющий ьход которого соединен с первым выходом блока управления, второй выход которого подключен к управляющему &ХОДУ коммутатора, Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство CXXIP № 245454, кл. А 06 р 15/46, . 1968. 2, Авторское свидетельство СССР №207471, Kn.G 06 F 15/46, 1966(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для выявления аварийных ситуаций | 1981 |
|
SU963029A1 |
| Устройство для выявления и классификации аварийных ситуаций | 1981 |
|
SU991464A1 |
| Устройство для контроля радиоэлектронных объектов | 1978 |
|
SU769554A1 |
| Система управления движением судна | 1978 |
|
SU717730A1 |
| Устройство для контроля и учета производственных процессов | 1985 |
|
SU1280415A1 |
| Аналого-цифровой преобразователь | 1976 |
|
SU577667A1 |
| Устройство для контроля ситуационной динамики сложных технических объектов | 1987 |
|
SU1481799A1 |
| Устройство для вычисления уровня жидких сред | 1984 |
|
SU1251101A1 |
| РЕГИСТРАТОР АВАРИЙ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ ЭНЕРГОСИСТЕМ | 2009 |
|
RU2402067C1 |
| Устройство для регистрации значений контролируемых параметров | 1982 |
|
SU1065689A2 |
в
/О
5
