Назначение всякого кантовального аппарата-кантовать слиток, т. е. переворачивать его с одной грани на другую (на 90°). Эта манипуляция необходима при прокатке, чтобы получить равномерное обжатие со всех четырех сторон.
Все существующие конструкции кантовальных устройств можно разделить на две категории:
1)со стационарным приводом, когда двигатель вынесен за пределы манипулятора (кантовальный аппарат первого советского блюминга),
2)с передвижным приводом, когда двигатель находится непосредственно на линейках манипулятора и передвигается вместе с ними (кантовальный аппарат Ижорского завода, „Демаг и т. д.).
Как первая, так и вторая категории имеют ряд существенных недостатков. Недостатки кантовальных аппаратов со стационарным приводом следующие: 1) все части кантовального аппарата, кроме редукторов, не защищены от попадания окалины и грязи; 2) большое количество щарнирных сочленений; 3) наличие большого количества передач придает механизму громоздкость; 4) относительно большое
время кантования - от 3 до 4 сек.; 5) дороговизна.
Недостатки кантовальных аппаратов с передвижным приводом состоят в следующем: 1) при установке двигателя на линейках последний подвержен толчкам, вредно отражающимся на его работе; 2) также вредно отражается на работе двигателя влияние высоких температур от раскаленных слитков; 3) наличие червячной передачи обусловливает отдаление кантовальных крючьев на 300-35Q м.н от каретки; 4) наличие редукторов и коленчатого вала придает громоздкость механизму; 5) большое время кантования.
Предлагаемый настоящим изобретением кантовальный аппарат имеет целью устранить все перечисленные выше недостатки путем замены двигателя электромагнитом, работающим по принципу втягивающегося соленоида. Наличие электромагнита вместо двигателя значительно упрощает конструкцию и дает возможность более быстрого кантования в пределах максимум 1 секунды.
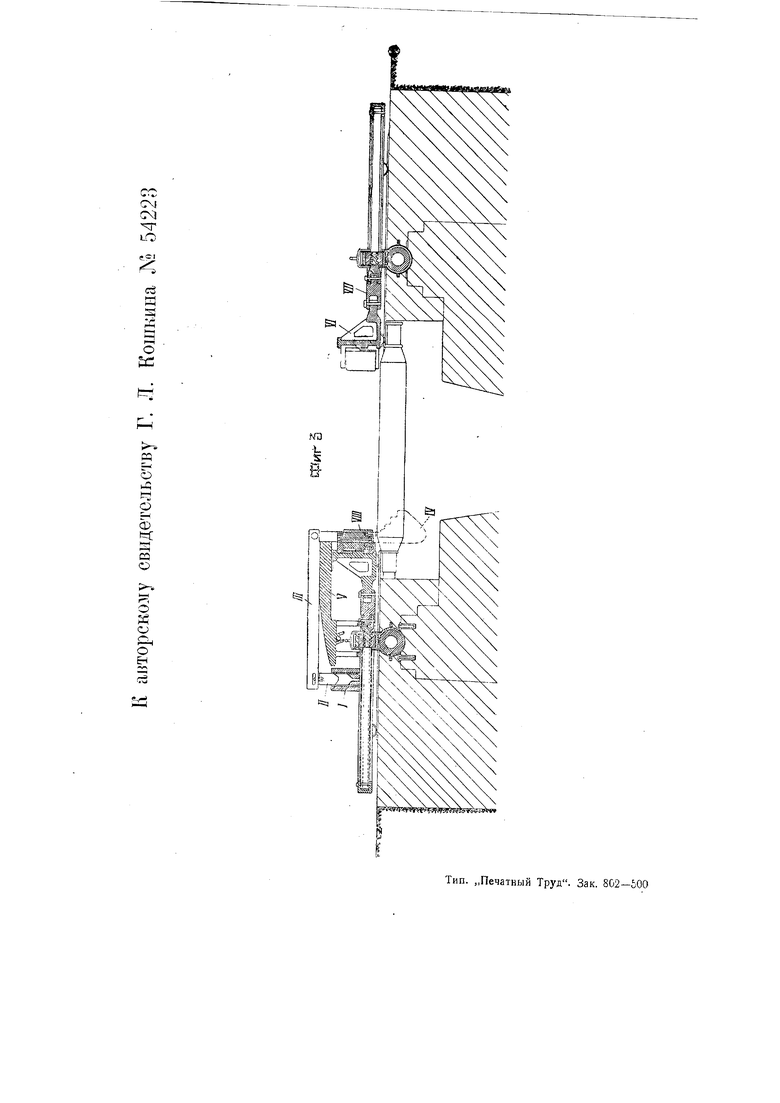
На чертеже фиг. 1 и 2 дают боковой вид и план кантователя, фиг. 3 - разрез кантователя вместе с манипулятором. Последний представлен только с целью показать связь его с кантователем.
Привод кантовального аппарата состоит из электромагнита (, работающего по принципу втягивающегося соленоида, сердечник II которого связан рычагом III с поперечиной IX, на которую насажены четыре кантовальных крюка IV. При подаче тока в обмотку электромагнита создается электромагнитное поле, сердечник втягивается и тянет за собой рычаг III с насаженными на поперечине IX кантовальными крючками IV, перемещением которых вверх производится кантование слитка. Приводное устройство помещается на раме Vil и каретке VI манипулятора и передвигается вместе с ними. Криволинейная очерченная по параболе опора V необходима для создания в первый момент минимального тягового усилия.
При начальном положении, когда электромагнит 1 еще не включен, рычаг III касается криволинейной опоры V только одной точкой, причем соотношение плеч рычага 111 составляет 1 : 10 и потому сообщаемое электромагнитом усилие в начальный момент должно быть в 10 раз меньше усилия, необходимого для кантовки
слитков. В конце хода электромагнит развивает силу, во много раз превыщающую первоначальную (свойства электромагнита), но в то же время изменяется и соотнощение плеч рычага 111, которое станет равным 10:1; следовательно, и момент возрастет в 10 раз. Возрастание момента, получающегося в результате умножения веса крюков и слитка на изменяющееся плечо в каждый отдельный момент, будет происходить постепенно, так как плечо рычага при его обкатывании по криволинейной опоре будет также увеличиваться постепенно по мере втягивания сердечника.
Предмет изобретения.
Кантователь к блюмингу с помещенным на раме манипулятора приводом, отличающийся тем, что привод его выполнен в виде электромагнита 1, сердечник И которого связан с воздействующим на кантовальные крючья IV рычагом III, имеющим опору в виде параболической поверхности, с целью создания переменного тягового усилия в соответствии с режимом работы электромагнита и условий кантования.