При конструировании машин часто приходится преобразовывать вращательное движение в поступательное через посредство кулачка. При этом кулачок должен иметь достаточно плавную кривую для того, чтобы угол, под которым производится нажим кулачка на поступательно перемещающийся элемент, не был больщим, а для этого при значительной длине поступательного хода кулачок должен иметь больщие габариты, что нарушает компактность машины, а иногда приводит и к невозможности разрешения вопроса данным путем.
Предлагаемый кулачковый привод устраняет этот недостаток, являясь весьма компактным и обеспечивая большой диапазон действия поступательно перемещающегося элемента при сохранении благоприятных условий взаимодействия кулачковых поверхностей с этим элементом.
Согласно изобретению, обычный кулачок монтирован неподвижно и взаимодействует со свободным концом плеча, поворотно в плоскости вращения ведущего вала монтированного другим своим концом на этом валу и взаимодействующего своими промежуточными точками с поступательно перемещающимся элементом.
Согласно изобретению диапазон действия поступательно перемещающегося элемента удваивается путем применения двух последовательно действующих плеч.
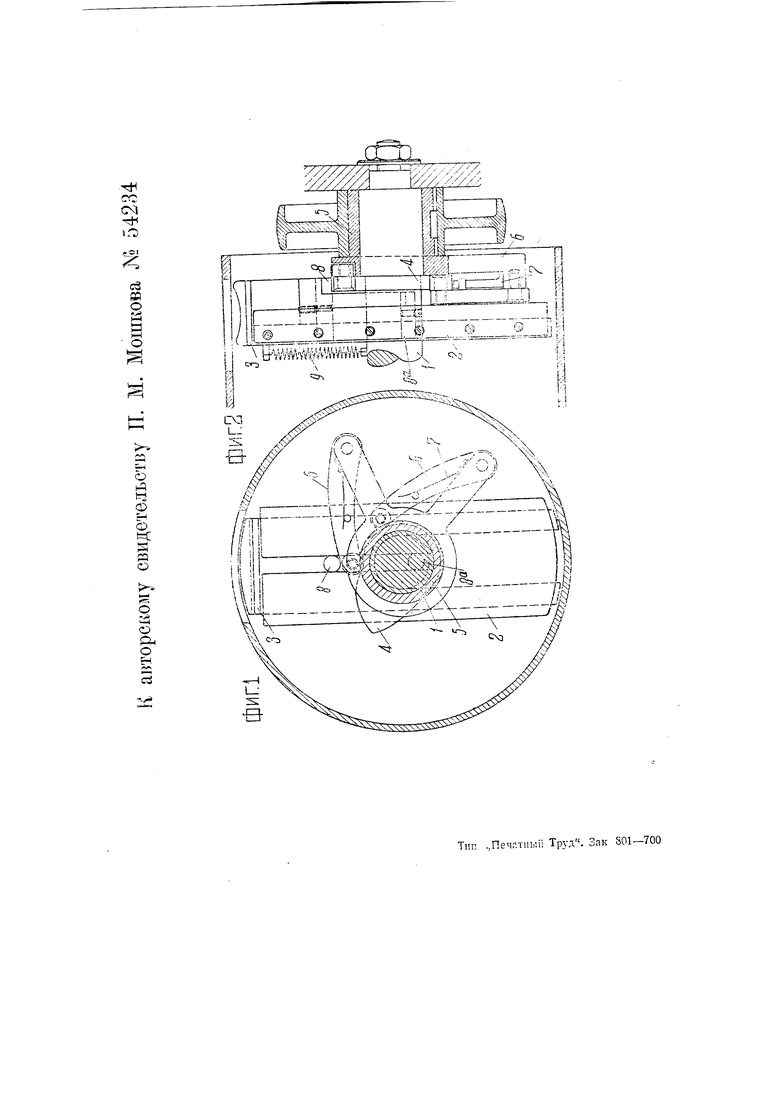
На чертеже фиг. 1 изображает поперечный разрез привода, а фиг. 2 - осевой разрез того же привода.
К неподвижной части (в данном случае валу 7) крепится направляющая 2, по которой ходит ползун 3. К этому же валу / крепится неподвижный кулачок 4. К вращающейся втулке 5 на определенном расстоянии от оси вала 7 шарнирно крепятся кривые плечи б (в данном случае два, но, если нужен больший подъем ползуна 3, можно применить этих плеч три или четыре,по мере надобности). Плечи 6 прижимаются пружинками 7 к неподвижному кулачку#. Ползун 3 имеет ролики 8 и 5а, которые катаются и.о рабочим поверхностям плеч б. При вращении получается двойной подъем, так как плечи 6 сами последовательно поднимаются по неподвижному кулачку 4 и последовательно поднимают ползун 3. Благодаря такому положению угол подъема
получается вполне приемлемым. При окончании работы одного плеча вступает второе. Благодаря тому, что плечи находятся не в одной плоскости, каждое из них находит свой ролик при подъеме ползуна. Так как ролик 8а находится в нижнем положении за центром вала 7, в последнем выбран паз, Б который входит отросток ползуна, несущий на себе ролик 8а. Назад ползун возвращается пружиной Р.
Предмет изобретения.
1. Кулачковый привод, заключающий в себе кулачок и поворотное
около опоры на одном своем конце плечо, свободно опирающееся другим концом на кулачок и взаимодействующее с ведомым элементом, отличающийся тем, что кулачок укреплен на неподвижном валу, а плечо монтировано поворотно на цапфе, вращающейся около оси того же вала.
2. Видоизменение кулачкового привода по п. 1, отличающееся применением нескольких поворотных плеч, последовательно вступающих во взаимодействие с ведомым элементом и последовательно увеличивающих смещение последнего.
n
rv-v
05
).O
SQ О
f
ЬЧ
о
f
hQ Ч Ф
О fcC
s я о
:4
Он О
г
сЗ --/
е
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление для включения штамповочного пресса обеими руками | 1938 |
|
SU55352A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Машина набора в рамки растительных ворсовальных шишек | 1959 |
|
SU123935A1 |
| РЫЧАЖНО-КУЛАЧКОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2011071C1 |
| Знаковыбирающее устройство, например,для пишущих машин | 1971 |
|
SU522827A3 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ПУСТОТЕЛЫХ ЗАКЛЕПОК | 1973 |
|
SU404537A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
| Станок для точки кардной гарнитуры шляпок | 1954 |
|
SU100815A1 |
| Дозировочный автомат к шприц машине | 1950 |
|
SU96052A1 |
| Передвижное автоматически действующее устройство для смены шпуль в челноках тюлевых и гардинных машин | 1953 |
|
SU99523A1 |