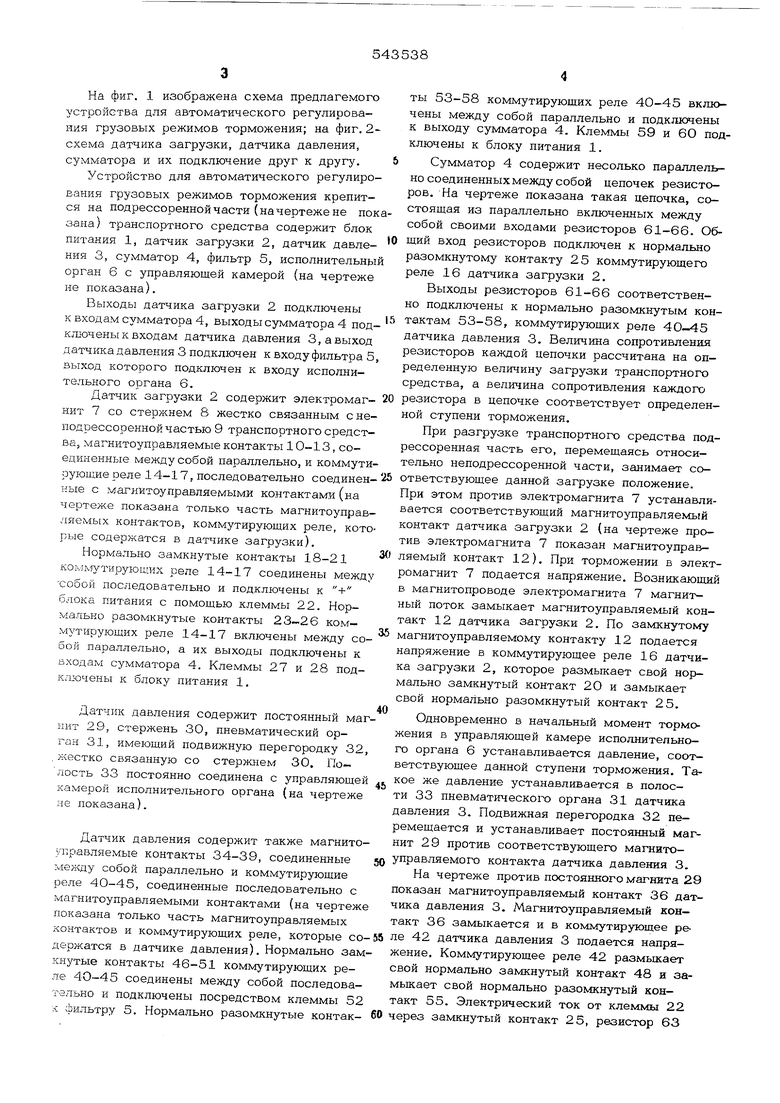
3 На фиг. 1 изображена схема предлагемого vc-ooMGTBa для автоматического регулированкя грузовых режимов торможения; на фиг. 2схема датчика загрузки, датчика давления, сумматора и их подключение друг к друп.6 Устройство для автоматического регулиро „„„вания грузовых режимов торможения крепится на подрессоренной части (на чертеже не показана) транспортного средства содержит блок питания 1, датчик загрузки 2, датчик давле- кия 3, сумматор 4, фильтр 5, исполнительный орган б с управляющей камерой (на чертеже HQ ПОКЭЗЭ.НЙ / « Выходы датчика загрузки 2 подключены к входaMcvMMaTopa 4, выходы сумматора 4 под- ключены к входамдатчика давления 3, а выход датчика давления 3 подключен к входу фильтра 5, выход которого подключен к входу исполнительного органа 6. Датчик загрузки 2 содержит электромаг- 20 нит 7 со стержнем В жестко связанным снеподрессоренной частью 9 транспортного средства,магнитоуправляемыеконтакты 10-13, соединенные между собой параллельно, и коммутирующие реле 14-17, последовательно соединен-ные с магнитоуправляемыми контактами (на чертеже показана только часть магнитоуправляемых контактов, коммутирующих реле, которые содержатся в датчике загрузки). Нормально замкнутые контакты 18-21 комкпп ирующих реле 14-17 соединены между гобой последовательно и подключены к + блока питания с помощью клеммы 22. Нормалько разомкнутые контакты 23-26 коммутирующих реле 14-17 включены между собой параллельно, а их выходы подключены к Бходам сумматора 4. Клеммы 27 и 28 подключены к блоку питания 1, Датч1П ; давления содержит постоянный магкит 29, стержень 30, пневматический орган 31, имеющий подвижную перегородку 32, . жестко связанную со стержнем 30. Полость 33 постоянно соединена с управляющей хамерой исполнительного органа (на чертеже не показана). Датчик давления содержит также магнитоуправляемые контакты 34-39, соединенные 50 между собой параллельно и коммутирующие реле 40-45, соединенные последовательно с магнитоуправляемыми контактами (на чертеже показана только часть магнитоуправляемых контактов и коммутирующих реле, которые со- S5 держатся в датчике давления). Нормально замкнутые контакты 46-51 коммутирующих реле 40-45 соединены между собой последовательно и подключены посредством клеммы 52 X фильтру 5. Нормально разомкнутые контак- 6 5435 38 4 ты 53-58 коммутирующих реле 40-45 вклк чаны между собой параллельно и подключены « выходу сумматора 4. Клеммы 59 и 60 подключены к блоку питания 1. Сумматор 4 содержит несолько параллельно соединенных между собой цепочек резисторов. На чертеже показана такая цепочка, состоящая из параллельно включенных между своими входами резисторов 61-66. Об ° резисторов подключен к нормально Разомкнутому контакту 25 коммутирующего Р загрузки 2. Выходы резисторов 61-66 соответствен«° подключены к нормально разомкнутым кон -58, коммутирующих реле 4О-45 Датчика давления 3. Величина сопротивления Резисторов каждой цепочки рассчитана на определенную величину загрузки транспортного J- « ,; f j г Г средства, а величина сопротивления каждого резистора в цепочке соответствует определенной ступени торможения. При разгрузке транспортного средства подрессоренная часть его, перемещаясь относительно неподрессоренной части, занимает соответствующее данной загрузке положение. При этом против электромагнита 7 устанавливается соответствующий магнитоуправляемый контакт датчика загрузки 2 (на чертеже про™в электромагнита 7 показан магнитоуправляемый контакт 12). При торможении в электромагнит 7 подается напряжение. Возникающий магнитопроводе электромагнита 7 магнит Ш поток замыкает магнитоуправляемый 2 датчика загрузки 2. По замкнутому магнитоуправляемому контакту 12 подается напряжение в коммутирующее реле 16 датчи загрузки 2, которое размьжает свой нормально замкнутый контакт 20 и замыкает свой нормально разомкнутый контакт 25. Одновременно в начальный момент торможения в управляющей камере исполнительного органа 6 устанавливается давление, соответствующее данной ступени торможения. Такое же давление устанавливается в полости 33 пневматическо1Т) органа 31 датчика давления 3. Подвижная перегородка 32 перемещается и устанавливает посто$шный магнит 29 против соответствующего магнитоуправляемого контакта датчика давления 3. На чертеже против постоянного магнита 29 показан магнитоуправляемый контакт 36 датчика давления 3. Магнитоуправляемый контакт 36 замыкается и в коммутирующее реле 42 датчика давления 3 подается напряжение. Коммутирующее реле 42 размыкает свой нормально замкнутый контакт 48 и замыкает свой нормально разомкнутый контакт 55. Электрический ток от клеммы 22 через замкнутый контакт 25, резистор 63 и замкнутый контакт 55 поступает к клемме 52 и далее через фильтр 5 в исполнительный орган 6. Таким образом, величина тока, подаваемого на исполнительный орган, зависит от величины загрузки транспортного средства и от величины ступени торможения. Исполнительный орган срабатывает и в тормозном цилиндре (на чертеже не изображен) устанавливается давление соответствующее величине загрузки транспортного средства и величине ступени торможения. Для исключения влияния динамических колебаний подрессоренной части транспортного средства на правильную установку грузового режима торможения служит фильтр 5, который усредняет и сглаживает сигнал, поступающий от датчика давления 3 и подает на исполнительный орган 6 стабилизированный сиг нал. Формула изобретения 1. Устройство для автоматического регулирования грузовых режимов торможения железнодорожного транспортного средства, содержащее подключенные к блоку питания датчик загрузки, сумматор, фильтр, исполнительный орган с управляющей камерой, при этом выхо ды датчика загрузки подсоединены к входам сумматора, а выход фильтра подсоединен к входу исполнительного органа, о т л и ч а ющ е е с я тем, что, с целью регулирования грузовых режимов торможения на ступенях торможения, датчик загрузки состоит из электромагнита со стержнем, жестко связанным с неподрессоренной частью транспортного средства и комментирующих реле, последовательно соединенных с ;.-1агнитоуправляемыли1 контактами, параллельно подключекнылгн друг к другу, причем устроГгстЕо снабжено датчикохт лагления, входы которого подключень: к сумматора, а выход - к ьходу iainbTr j. 2. УстроГстко по п. 1. о т . л v ; щ е е с я тем, что датчик лапло; : ЖИТ постоянный МаГК1ГТ, ЖОСТг О CVC/V- с подвижной перегородкой пневмат -Л-Л.. , органа, сообщенного с управляюше;: :;:,: - исполнительного органа, и комм тирую-ило л; ле, последовательно соединенные с магните- управляемыми контактами, параллельно подключенными друг к другу. Источники информации, принятые во внимание при экспертизе; 1.Патент Швейцарии Хз 475118, кл. Ъ 60 Т 8/18, 1967. 2.Патент Франции Х- 1-112460, кл. Б 61 Н 33/30, 196 4 {протот1 п 1.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования грузовых режимов торможения транспортного средства | 1977 |
|
SU662391A1 |
| Датчик загрузки для регулирования режимов торможения поезда | 1977 |
|
SU740568A1 |
| ГИДРОПЕРЕДАЧА ТРАНСПОРТНОЙ МАШИНЫ | 2000 |
|
RU2185968C2 |
| УКАЗАТЕЛЬ ПОВОРОТА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2021924C1 |
| Устройство для автоматического регулирования в тормозных цилиндрах электропневматического тормоза | 1985 |
|
SU1281459A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2077997C1 |
| Система автоматического управления гидромеханической трансмиссией | 1988 |
|
SU1602772A1 |
| Стенд для испытания автоматических регуляторов режимов торможения | 1986 |
|
SU1422059A1 |
| Регулятор | 1980 |
|
SU881703A1 |
| Коммутационное устройство | 1989 |
|
SU1647692A1 |
фцг.г
