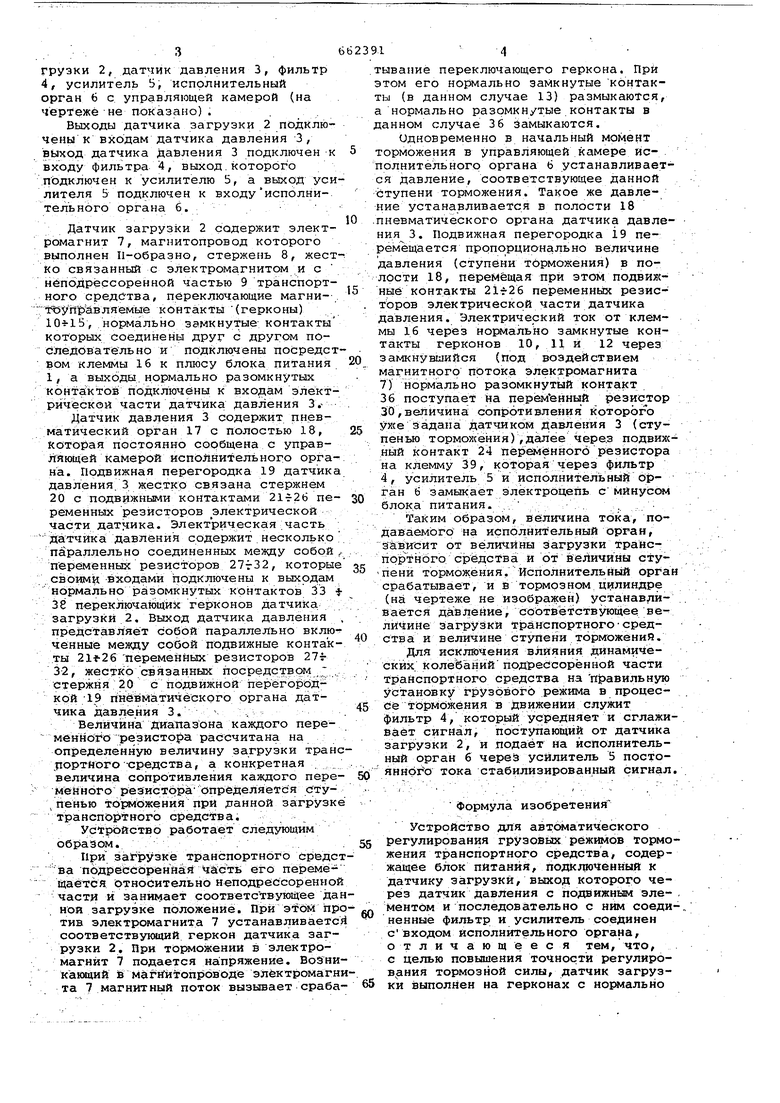
, 1„ Изобретение относится к области транспорта и может быть использован в устройствах регулирования тормозной силы транспортного средства. Известны устройства для автомати ческого регулирования грузовых режимов транспортного средства, содер жащие блок питания, соединенный с датчиком загрузки и через Датчик давления - с исполнительньм органом llj .. Недостатком известных устройств является сложность конструкции датчиков загрузки и давления. Наиболее близким прототипом к пр длойфннсалу устройству является устройство для автоматического регулирования грузовых режимов тогжюжения транспортного средства, содержащее блок питания, подключенный к датчик загрузки, выход которого через датч давления с подвижным элементом и последовательно с ним соединенные фильтр и усилитель соединен с входо исполнительного органа 2. Однако, известные устройства не обеспечивают необходимой-точности регулирования тормозной силы. Целью изобретения является повышение точности регулирования тормоз ной сила. Для этого датчик загрузки выполнен на герконах с нормально замкнутыми и нормально разомкнутыми контактамиj число которых равно числу ступеней торможения, и содержит электромагнит, жестко соединенный через стержень с неподрессоренной частью транспортного средства , причем нормально замкнутые контакты герконов соединены последовательно друг с другом и с одним полюсом блока питания, датчик давления снабжен параллельно соединенными между собой переменными резисторами, средние контакты которых подключены к другому полюсу блока питания и жестко связаны с подвижным элементом датчика давления,а другой вййод каждого из резисторов соединен с соответствующим нормально разомкну тьм контактом датчика загрузки. На фиг. 1 показана структурная схема устройства на фиг.2 представлена электрическая схема датчика загрузки, датчика давления и их подключение/друг к другу. Устройство устанавливается на подрессореной части (на чертеже не показана) транспортного средства и содер ит блок питания 1, датчик за3грузки 2, датчик давления 3, фильтр 4, усилитель Ь, исполнительный орган 6 с управляющей камерой (на чертеже не показано). Выходы датчика загрузки 2 подключены к входам датчика давления 3, выход датчика давления 3 подключен к входу фильтра 4, выход.которого подключен к усилителю 5, а выход уси лителя 5 подключен к входуисполнительного органа 6. Датчик загрузки 2 содержит электромагнит 7, магнитопровод которого выполнен П-образно, стержень 8, жест ко связанный с электромагнитом и с нёподрёссоренной частью 9 транспортного средства, переключающие магни.;т Уг1Швляемые конта кТы (герконы) , нормально замкнутые контакты которых Соединены друг с другом последовательно и подключены посредст вом клеммы 16 к плюсу блока питания 1, а выходы.нормально разомкнутых контактов подключены к входам электрической части датчика давления 3, Датчик давления 3 содержит пневма тйческий орган 17 с полостью 18, которая постоянно сообщена с управ лЯющей камерой исполнительного органа. Подвижная перегородка 19 датчика давления. 3 жеСткр связана стержнем 20 с подвижными контактами 21т26 переменных резисторов электрической части . Электрическая-часть Йатчйка давления содержит несколько /параллельно соединенных между собой переменных резисторов 27тЗ2, которые /своими -входами подключены к выходам нормально разомкну;тых контактов ЗЗ 38 переключающих герконов датчика. загрузки 2. Выход датчика давления представляет собой параллельно вКлю ченныё между собой подвижные контак ты переменйых резисторов 27f 32, жестко ев:г1занных посредством , Стержня 20 с подвижной пер&горопкрй -19 пневматического органа датчика давления 3, , Величина Ди:а1тазона каждого переменного резистора рассчитана на определенную величину загрузки тран ,порт йог о -средства, а конкретная . величина сопротивления каждого пере - менного резистора определяется ступенью торможения при данной загрузк Транспортного средства. Устройство работает следующим образом.. При загрузке транспортного средс ва подрессЬренйая часть его перемё щаётся относительно неподрессоренно части и занимает роответствующее да ной загрузке положение. При этой пр тив электромагнита 7 устанавливаете соответствующий геркон датчика загрузки 2, При торможении в электромагнит 7 подается напряжение. ВоЭни кающий в магййтопроводе эЛёктромагн та 7 магнитный поток вызывает сраба 1 ывапие переключающего геркона. При том его нормально замкнутые контакы (в данном случае 13) размыкаются, нормально разомкн/тые контакты в анном случае 36 замыкаются. Одновременно в начальный момент орможения в управляющей камере исолнительного органа 6 устанавливаетя давление, соответствующее данной тупени торможения. Такое же давлеие устанавливается в полости 18 невматического органа датчика давления 3. Подвижная перегородка 19 пеемещается пропорционально величине давления (ступени торможения) в полости 18, перемещая при этом подвижные контакты 21г2б переменньк резисторов электрической части датчика давления. Электрический ток от клеммы 16 через нормально замкнутые контакты герконов 10, 11 и 12 через замкну выийся (Под воздействием магнитного потока электромагнита 7) нормально разомкнутый контакт . 36 поступает на перёменный резистор 30,величина соп)р6тивления КоторогЪ ухсезадана датчиком давления 3 (ступенью торможения) ,далее чере.з подвияс ный контакт 24 переменного резистора на клемму 39, которая через фильтр 4, усилитель 5 и исполнительньай Орган б замыкает электроцепь с мИнуСс 4 блок.а питания. ./ :- . . . . Таким образом, величина тока, подаваемого на исполнительный орган, завксит от величины загрузки транспортного средства и от величины ступени тормож;ё ни я. Исполнитель ньйй орган срабатывает, и S тормозном цилиндре (на чертеже не изображен) устанавдйвается давлейие, соотвётствующее/велИЧийе загрузки транспортногосредства и величине ступени торможений. Для исключения влияния динамических, колебаний подрейсорённой части транспортного средства направильную установку грузового режима в процессе тормозкения в движении служит фильтр 4, который усредняет и сглаживает сигнал, поступающий от датчика загрузки 2, и подаёт на исполнительный орган б через усилитель 5 постоянного тока стабилизированный сигнал. Формула изобретения Устройство для автбматического регулирования грузовых режюлов торможения транспортного средства/ содержащее блок Питания, подключенный к датчику загрузки, выход которого через датчик давления с подвижным эле- , ментОм и последовательно с ним соеди-., ненные фильтр и усилитель соединен свходом исполнительного органа, отличающееся тем, что, с целью повышения точности регулиров.ания тормозной силы, датчик загрузки выполнен на герконах с нор ально
замкнутыми и нормально разомкнутыми контактами, число Которых равно числу ступеней, торможения, и содержит электромагнит, жестко соединенный через стержень с неподрессорённой частью транспортного средства причем нормально замкнутые контакты герконов соединены последовательно друг с .другом и с одним полюсом блока питания, датчик давления сйабжен параллельно соединенными между собой переменными резисторами, средние контакты которых подключены.к другому
полюсу блока питания и жестко связаны с подвижные элементом датчика давления, а другой вывод каждого из резисторов соединен с соответствующим нормально разомкнутым контактом геркона датчика загрузки, .
Источники инфор 1ации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 69037, кл. В 60 Т 8/18, 1944.
2,Патент Швейцарии 475118, кл. в 60 Т 8/18, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик загрузки для регулирования режимов торможения поезда | 1977 |
|
SU740568A1 |
| Устройство для автоматического регулирования грузовых режимов торможения железнодорожного транспортного средства | 1975 |
|
SU543538A1 |
| Стенд для испытания автоматических регуляторов режимов торможения | 1986 |
|
SU1422059A1 |
| Устройство для автоматического регулирования в тормозных цилиндрах электропневматического тормоза | 1985 |
|
SU1281459A1 |
| УСТРОЙСТВО ВИЗУАЛЬНОГО ОТОБРАЖЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2281865C2 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444454C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УРАВНИТЕЛЬНЫМ ОРГАНОМ КРАНА МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2182541C1 |
| Тормозное управление многозвенного транспортного средства | 1980 |
|
SU910482A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Транспортное средство | 1989 |
|
SU1652115A1 |
