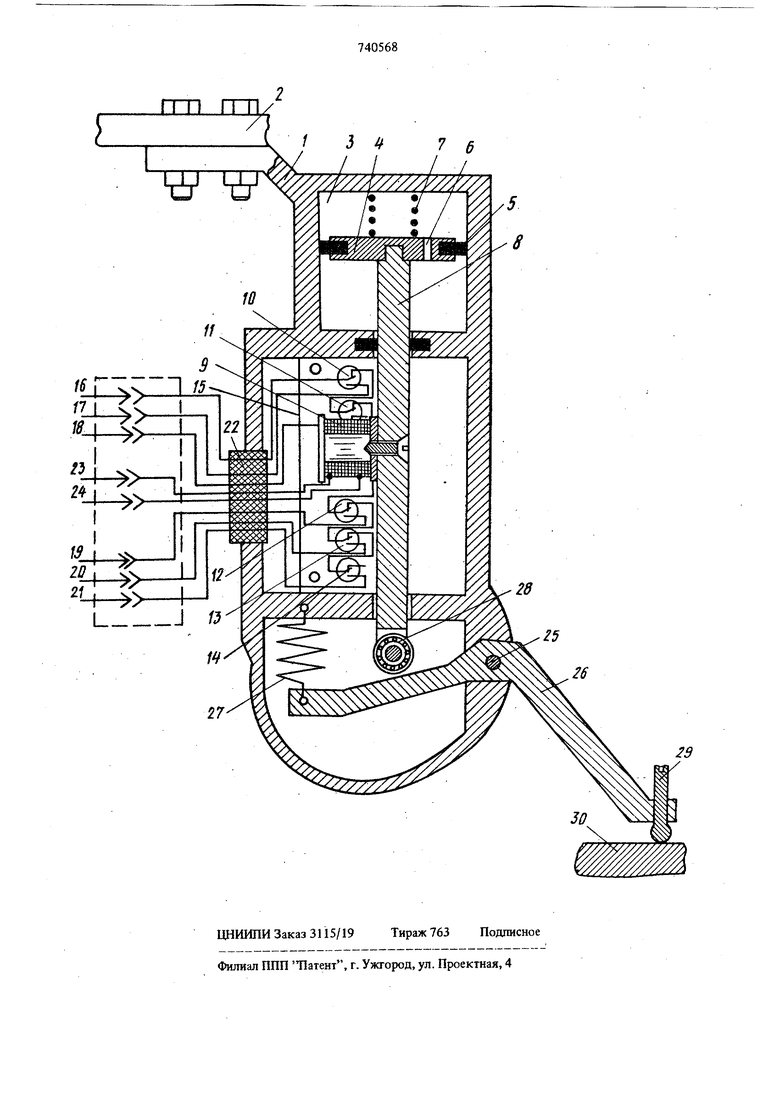
Изобретение относится к области железнодорожного транспорта и может быть использовано в устройствах автоматического регулирования грузовых режимов торможения поезда. Известны устройства и датчики регулировани грузовых режимов поезда, содержащие индуктивные датчики загрузки с непрерывным смещением, измерительные обмотки которых вклю чены в цепь исполнительных блоков, причем индуктивность обмоток изменяется за счет перемещения в них сердечника, связанного с неподрессоренной частью транспортного средства П Однако зти устройства имеют сложную конструкцию и низкую точность в работе. Известен также дачтик загрузки для регулирования режимов торможения поезда, содержащий корпус, установленный на подрессоренной части, в котором расположены электромагнит, подключенный к блоку питания и связанный посредством стержня с неподрессоренной частью транспортного средства, и герконы, число которых равно числу ступеней торможения и нормально замкнутые контакты которых соединены последовательно друг с другом и с одним из полюсов блока питания, а нормально разомкнутые контакты - с выходными клеммами датчика загрузки 2. Однако точность измерения зтим датчиком низка из-за влияния вертикальных перемещений транспортного средства. Целью изобретения является повышение точности работы путем исключения влияния вертикальных перемещений транспортного средства. Для этого предлагаемый датчшс выполнен с замкнутой полостью, наполненной жидкостью и («держащей подвимшую перегортдку с дроссельным отверстием, а электромагнит установлен на стержне, жестко связанном одним концом с подпружиненной подвижной перегородкой, а другим через щарикоподЩипниковый упор - с одним концом подпружиненного рычага, другой конец которого регулируемым упором связан с неподрессоренной частью транспортного средства. На чертеже представлена конструктивная схема предлагаемого датчика загрузки для регулирования режимов торможения поезда. Датчик содержит корпус 1, который монтируется на подрессоренной части транспортного средства 2 параллельно надбуксовому (IWH центральному) рессорному подвешиванию. В верхней части корпуса размещена замкнутая от атмосферы полость 3, а которой способна перемещаться перегородка 4, уплотненная от корпуса манжетами 5. В перегородке вьтолнен калиброванное отверстие 6, через которое при перемещениях перегородки перетекает из одной части полости в другую воздух (в случае пневматического демпфера) или жидкость (в случае гидравлического демпфера). Между Kopiiyсом и перегородкой в верхней части полости демпфера размещена предварительно сжатая пружина 7, стремящаяся удержать подвижную перегородку в крайнем шжнем положешш. По центру подвижной перегородки. запрессован шток 8 из диамагнитного материала, к которому крепится электромагнит 9 слежения, магштопровод которого выполненнь Й П-образно с воздушным зазором.может перемещаться вдоль ряда расположенных по вертикали герконов 10-14, установленных на плате 15, крепящейся к корпусу датчика. Нормально замкнутые контакты переключаго1Щ1х герконов соединетш последовательно друг с другом и подключены к клемме 16 блока питания, нормально разомкн тые контакты 17-21 через разгем 22 выводятся из корпуса дагдака. Через клемл-ш 23 и 24 разъема к обмотке электромапшта слеже11ия подводится питание от блока питания. В нижней части KOpstyca на ось 25 насажен рычаг 26 , на конец которого подпружиненный пружиной 27 опирается шток шарикоподщинником 28,, а другой регулируемым упором 29 опирается на плиту 30 неподрессоре ной части транспортного средства. При электроииевматическом торможешта транспортного средства подается питание в обмотку электромагнита 9 слежения, намагш чивается его магнитопровод, создавая в воздуш ном зазоре магнитный поток, воздействующий на магннтоуправляемые контакты датчика. Установка электромагнита слежения против определенного геркона зависит от величины ста тического прогиба рессорного подвешивания тележки, т. е. от величины загрузки транспортного средства. Однако при движении транспортно го средства в режиме торможения динаимческие вертикальные колебания передаются от неподре соренной пасти транспортного средства штоку 8, электромагниту 9 слежения и подвижной перегородке 4 демпфера. Резкие и кратковременны импульсы вертикальной динамики при прохождении транспортным средством неровностей пути стремятся переместить шток 8, а вместе с ним и подвижную перегородку 4. Резкому перемещению подвижной перегородки противодействует сопротивление упругой сре,цы (воздух, масло), не успевающей за четверть периода колебания перетечь через калиброванные отверстия из одной части полости демпфера в другую. В этом случае с одной стороны подвижной перегородки создается сжатие, с другой - разряжение демпфирующей среды, что создает значительные сопротивле шя перемещению перегородки в ту или иную сторону и в конечном счете NffloroKpaTHO снижается амплитуда первоначальных колебаний Ширина пучка магнитного потока электромагнита слежения датчика и щаг (расстояния между центрами герконов на плате) выбраны таким образом, что максимально допустимые значения вертикальной динамики, сглаженные демпфером, не изменяют грузового режима торможения, т.е. магнитный поток электромагшла слежения захвать вает зону срабатывания одного определенного статическим прогибом рессор, геркона. Магнитоуправляемые контакты подключены в схеме датчика таким образом, что и при срабатывании двух герконов одновременно (при установке электромагнита слежения в промежуточной зоне между герконами) на выход датчика подается сигнал, соответствующий одному грузовому режиму торможения. При торможегтии плюс питания подается на клемму 16, проходит через последовательно соединенную цепь нормально замкнутых контактов до сработавшего под воздействием магнитного потока электромагнита слежения геркона, через включенный его нормально разомкн -тый контакт - на один из контактов 17-21 выхода датчика загрузки и далее на соответств)тощий вход электропневматического нспол}штелз ного блока ( не показан) и с выхода его - на другую клемму блока питания. Электронневматический исполнительный блок срабатывает, а в .тормозном щтиндре/не показан) устанавливается давление, соответствующее величине загрузки транспортного средства. Защита измерительного узла датчика от вертикальной динамики при торможении с высоких скоростей движения возможна тогда, когда амплитуда колебаний подрессоре1шой части экипажа превышает расчетные значения . Пружина 27 установлена в нижней части корпуса датчика с предварительным натяжением, обеспечивающим преодоление усилия со стороны щтока демпфера, удерживая подвижную перегоровдку в крайнем верхнем положении при отсутствии контакта с плитой 30 неподрессоренной 4acTii. При наличии контакта между регулируемым упором 29 и плитой 30 ( т.е. при прогибе рессорного комплекта тележки вагона соответственно загрузке) рычаг 26 поворачивается вокруг оси 25, растягивая пружину 27, без непосредственного воздействия на шток 8 демпфера датчика. Подвижная перегородка под воздействием усилия предвари тельно сжатой пружины 7 перемещается вшо (при этом происходит перетекание через калиброванное отверстие 6 демпфирующей среды из нижней части полости демпфера в верхнюю) до упора штока шарикоподшипником 28 в опорную поверхность рычага 26. Таким образом перемещения подрессоренной части средства по вертикали в ту или иную сторону не оказывают непосредственного воздействия на шток датчика, что повышает надежность действия устройства в условиях максимальной вертикальной динамики. Формула изобретения Датчик загрузки для регулирования режимов торможения поезда, содержащий корпус, установленный на подрессоренной части транспортного средства, в котором расположены электро магнит, подключенный к блоку питания и связанный посредством стержня с неподрессоренной частью транспортного средства, и герконы. число которых равно числу ступеней торможения и нормально з икнутые контакты которых соединены последовательно друг с другом н с ОДНИМ КЗ полюсов блока питания, а нормально разомкнутые контакты - с выходными клеммами датчика загрузки, отличающийся тем, что, с целью повышения точности работы за счет исключения влняшш вертикальных перемещений транспортного средства, он выполнен с замкнутой полостью, наполненной жидкостью и содержащей подвижную перегородку с фocceльным отверстием, а электромагнит установлен на стержне, жестко связанным одним концом с указаяной 1юдвижной перегородкой, а другим через итрнкоподшишшковый упор с одним концом подпружиненного рычага, другой конец которого регулируемым упором связан с неподрессоренной частью транспортного средства. Источники информации, принятые во внимание при экспертиза 1.Патент Японии № 7485, кл. 79А1342, 1966. 2,Авторское свидетельство СССР № 2467257/11, кл. В 60 Т 8/18, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования грузовых режимов торможения транспортного средства | 1977 |
|
SU662391A1 |
| Устройство для автоматического регулирования грузовых режимов торможения железнодорожного транспортного средства | 1975 |
|
SU543538A1 |
| Устройство для автоматического регулирования в тормозных цилиндрах электропневматического тормоза | 1985 |
|
SU1281459A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПЕРЕКЛЮЧЕНИЯ ГРУЗОВЫХ РЕЖИМОВ ВОЗДУХОРАСПРЕДЕЛИТЕЛЯ | 1991 |
|
RU2009912C1 |
| Стенд для испытания автоматических регуляторов режимов торможения | 1986 |
|
SU1422059A1 |
| Имитатор вибронагружений диагностического стенда для испытаний тормозных аппаратов | 1987 |
|
SU1411606A1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| Способ контроля дозирования сыпучего груза, преимущественно балласта, на железнодорожный путь из специального подвижного состава с известной жесткостью рессорного подвешивания и система для его реализации | 2021 |
|
RU2769590C1 |
| АВТОРЕГУЛЯТОР ГРУЗОВОГО РЕЖИМА ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2322364C1 |
| Самосвальное транспортное средство для перевозки легковесных грузов | 1988 |
|
SU1643237A1 |