4
СО
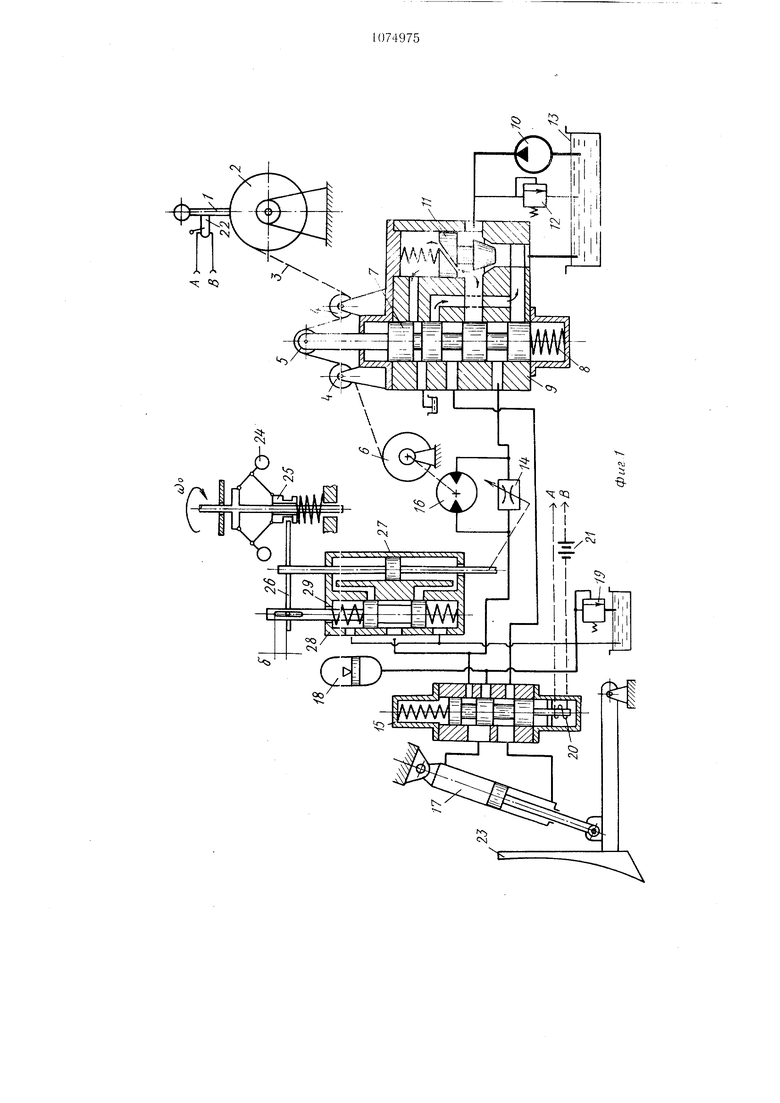
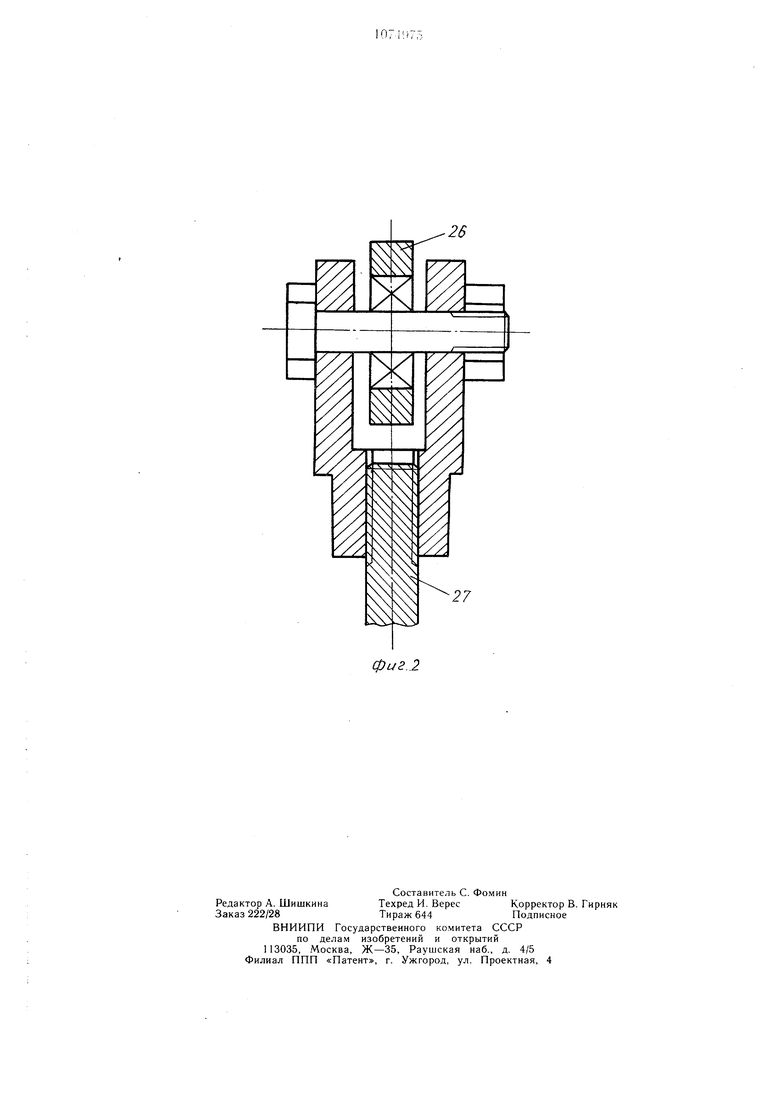
О1 Изобретение относится к строительном;/ и дорожному машиностроению, а именно унравлению рабочими органами землеройных машин. По основному авт. св. № 962483 известна следяш,ая система унравления рабочи органом землеройной машины, включавшая ручку унравления, распределитель с поднружиненным золотником, механизм осратной связи, гидромотор, включенный Нсраллельно регулируемому дросселю, элеь;троклапан и гидроцилиндр подъема рабочего органа 1. Недостаток известной системы заклки чается в том, что коэффициент усиления следящей системы управления, равный отношению величины перемещения рабочего органа к перемещению ручки унравления и огфедсляемый ре1улируемым дросселем, устанавливается субъективно и не является оптимальным для данных условий pa6oTt.i, что снижает производительность ман1ипь,1. Целью изобретения является повышение производительности машины путем автоматического управления коэффициентом усиления в зависимости от ее режима pa6oTtj. Эта цель достигается тем, что следящая система управления рабочим органом землеройной машины снабжена связанным с двигателем землеройной машины центробежным регулятором и регулирующим органогл, выполненным в виде расположенных в одном корпусе следянлего цилиндра и следпHiero подпружиненного распределителя, гидравлически связапного с электрогидравлнческим клаианом, при этом золотник следящего распределителя имеет продольную прорезь и посредством установленного в |ик чедней рычага связан с центробежнь м регулятором, а шток следящего цилиндра соответственно связан с управлением ре V.inpyeMoio дросселя и шарнирно со средi:eii частью рычага. (|)иг. 1 изображена кинематическая схема с:1сдянхей систе.мы унравления рабочг м органом землеройной машины; на (i)hr. 2 - шарнирное соединение штока сле1 пцего ци.тиндра с рычагом. Система унравления включает ручку 1 Г1равления, смонтированную на корпу:е ;:оворотного барабана 2, трос 3, закрен,р,м1ный на барабане и через неподвижные IvioKH 4 и подвижный блок 5 соединенный ( приемным барабаном 6. 11о;1впж1 ый блок 5 закреплен на золстпике 7, соединенном с пружиной 8 и вмонriiptnsaHHOM в корпус распределителя 9. 1 чснределитель 9 соединен с гидронасосом 10, нереливным 11 и предохранительным 12 клапанами, масляным баком 13 и через ре гулируемый дроссель 14 - с электрогидравлическим клапаном 15. Параллельно регулируемому дросселю 14 подключен гидромотор 16 двухстороннего действия, на ъа;iy которого стаповле|1 приемный барабан 6. Электрогидравличсский клапан 15 соединен с силовым гидроцилиндром 17, гидроннев.хюаккумулятором 18 и предохранительным клапаном 19. Электрогидравлический клапан 15 снабжен э;1ектромагнитом 20, соединенным с аккумуляторной батареей 21 и тумблером 22, смонтированным на ручке 1 унравления. Силовой гидроцилиндр 17 соединен с рабочим органом 23. Центробежный регулятор 24 связан с двигателем землеройной манаины и посредством муфты 25 - с рычагом 26, средняя часть которого закреплена н арнирно на штоке следяшего цилиндра 27, а второй конец установлен в продольную прорезь, вьпюлнецную в uJTOKe золотника следящего распределителя 28. Золотник следящего распределителя 28 снабжен центрирующими пружинами 29 и запитан от нагчетате чьной Гидролинии, включенной у-1ежду э.;1ектро идравлическим клапаном 15 и гидромотором 16. Шток следящего цилиндра 27 связан с управлением регулируемого дросселя 14. Расположенный в одном корпусе следящий цилиндр 27 и следящий подпружиненный распределитель 5, гидрав.аическн связанный с электрогидравлическим к.лапаном 15, образуют регулирующий орган. Устройство работает следующим образом. При вынолнении онерапии копания грунта электрогидравличеекий клапан 15 вык„тючен и через его корпус жидкость от раснределителя 9 проходит к гидроцилиндру 17. При колебаниях частоты вращения вала двигателя4 о вокруг но.минального значения золотник следящего раенределителя 28 остается неподвижным, так как рычаг 26 обратной связи перемещается в ирорези LHTOKa золотника следящего распределителя 28. Величипа колебаний онределяется зазором 6 . При необходимости выглубления рабочего органа 23 оператор неремеп1ает ручку унравления на себя с необходимой скоростью. Трос 3 наматывается на барабан 2, перемещает золотник 7 раенределителя 9 вниз и сжимает пружину 3. Рабочая жидкость через переливной клапан И, корпус распределителя 9 и электрогидро.кланан 15 постунает в нижнюю (н токовую) полость силового гидроцилиндра 17. Поршень 1идроцилиндра поднимается вверх, выглубляя рабочий орган 23, и вытесняет рабочую жидкость из верхней (порщневой) полости гидроцилиндра 17, которая проходит через электрогидроклапан 15, регулируемый дроссель 14, корпус распределителя 9 и переливной клапан 11 в бак 13. Так как проходное сечение регулируемого дросселя 14 мало для того, чтобы пропустить всю рабочую жидкость, поступающую от гидроцилиндра 17, то часть жидкости пройдет на слив, через гидромотор 16, который, вращаясь по часовой стрелке, сматывает трос 3, закрепленный на нем. Ослабление натяжения троса приводит к тому, что золотник под действием пружины 8 начинает перемещаться вверх, перекрывая рабочие окна распределителя .9, останавливая гидроцилиндр 17 и гидромотор 16. При увеличении угла поворота ручки управления но часовой стрелке происходит дальнейшее выглубление рабочего органа 23. При выглублении рабочего органа 23 двигатель землеройной мащины разгружается и увеличивает угловую скорость вращения, коленчатого вала. Подвижная муфта 25 центробежного регулятора 24 перемещается вверх. Как только ход рычага 26 становится больще зазора S, золотник следящего распределителя 28 перемещается вниз, подавая жидкость в нижнюю полость следящего цилиндра 27. Шток последнего, перемещаясь вверх, увлекает рычаг 26, который освобождает золотник следящего распределителя 28. Последний центрирующими пружинами 29 ,ставится в нейтральное положение, что прекращает подачу жидкости в следящий цилиндр 27. В результате движения порщня цилиндра 27 вверх регулируемый дроссель 14 перестраивается таким образом, чтобы уменьп:алась подача жидкости через гидромотор 16. Это приводит к уменьщению коэффициента обратной связи, перемещение рабочего органа 23 уменьщается, что предотвращает полное выглубление рабочего органа 23 и потерю призмы грунта. При необходимости заглубления рабочего органа 23 оператор перемещает ручку 1 управления от себя (на схеме - против часовой стрелки). Трос 3 при вращении барабана 2 ослабляется, и золотник 7 под действием пружины 8 перемещается вверх. Жидкость от насоса 10 через переливной luianaH И, корпус распределителя 9, дроссель 14 и корпус электрогидроклапана 15 поступает в порщпевую полость гидроцилиндра 17, заглубляющего рабочий орган 23. Часть жидкости, которую не пропускает дроссель 14, проходит в гидроцилиндр 17 через гидромотор 16. Последний, вращаясь против часовой стрелки, натягивает трос 3. Золотник 7 под действием натяжения троса 3 перемещается вниз, закрывая рабочие окна распределителя 9 и останавливая силовой гидроцилиндр 17. При увеличении угла поворота ручки 1 управления против часовой стрелки происходит дальнейщее заглубление рабочего органа 23. При этом увеличивается сила копания и наступает перегрузка двигателя землеройной мащины - угловая скорость вращения его коленчатого вала падает. Это вызывает движение муфты 25 регулятора 24 вниз. Как только ход рычага 26 становится больще величины 5 , золотник следящего распределителя 28 перемещается вверх, подавая жидкость в верхнюю полость следящего цилиндра 27. Шток последнего, перемещаясь вниз, увлекает рычаг 26, который освобождает золотник следящего распределителя 28. Последний центрирующими пружинами 29 ставится в нейтральное положение, что прекращает подачу жидкости в следящий цилиндр 27. В результате движения порщня цилиндра 27 вниз регулируемый дроссель 14, связанный с ним, перестраивается таким образом, что увеличивается подача жидкости через гидромотор 16. Это приводит к увеличению коэффициента связи следящей системы управления. Оператор получает возможность быстрее выглубить рабочий орган и снять перегрузку с мащины. Aw ;fc

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система управления рабочим органом землеройной машины | 1981 |
|
SU962483A1 |
| Следящая система управления рабочим органом землеройной машины | 1982 |
|
SU1076551A1 |
| Следящий гидропривод рабочего органа землеройной машины | 1982 |
|
SU1084391A1 |
| Машина для рытья траншей | 1979 |
|
SU829825A1 |
| Землеройная машина | 1979 |
|
SU861510A1 |
| СИСТЕМА ПРИВОДА МОБИЛЬНОГО ЭНЕРГЕТИЧЕСКОГО СРЕДСТВА СЕЛЬХОЗНАЗНАЧЕНИЯ | 2011 |
|
RU2480352C1 |
| Гидропривод машины для рытья траншей | 1979 |
|
SU878873A1 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| Землеройная машина | 1982 |
|
SU1060771A1 |
| Кабелеукладчик | 1988 |
|
SU1564287A1 |
СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНОЙ МАШИНБ1 по авт. св. № 962483, отличающаяся тем, что, с целью повышения производительности машины, она снабжена связанным с двигателем землеройной машины центробежным регулятором и ре гулирующим органом, выполненны.м в виде расположенных в одном корпусе следяш.его цилиндра и следяшего подпружиненного распределителя, гидравлически связанного с электрогидравлическим клапаном, при этом золотник следяшего распределителя имеет продольную прорезь и посредством установленного в последней рычага связан с центробежным регулятором, а шток следяшего цилиндра соответственно связан с управлением регулируемого дросселя п шарнирно со средней частью рычага.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следящая система управления рабочим органом землеройной машины | 1981 |
|
SU962483A1 |
