1
Изобретение относится к лесной промышленности, в частности к механизмам поворота грузоподъемного органа лесных машин, выполняюш,их, например, погрузочно-разгрузочиые операции на береговых нижних складах, забор и трансиортировку пачек или пучков бревен.
Известен механизм поворота грузоподъемного органа погрузчика, содержаш,ий коромысло, установленное на одной оси с грузоподъемным органом и шарнирно связанное с параллельно соединенными между собой группами гидроцилиндров поворота коромысла и грузоподъемного органа, насос, гидробак, гидрозолотник, трубопроводы.
Недостатком известного механизма является применение гидроцилиндров различной длины, что, в свою очередь, приводит к усложнению изготовления и ухода, ухудшает ремонтопригодность, снижает компактность и надежность механизма в работе.
Кроме того, в случае использования такого механизма поворота грузоподъемного органа в машине для сплотки и транспортировки лесоматериалов, где на механизм поворота грузоподъемного органа на различных участках будут действовать разные нагрузки, мош,ность гидропривода будет использоваться нерационально.
Цель изобретения - унификация гидроцилиндров, сокращение продолжительности рабочего цикла.
Для этого в трубопровод, соединяющий поршневые полости гидроцилиндров поворота грузоподъемного органа, включено распределительное устройство с выключателем, а группа гидроцилиндров поворота коромысла снабжена разгружающим устройством.
Кроме того, разгружающее устройство выполнено в виде штока, один конец которого щарнирно связан с коромыслом, а другой снабжен выступом, а распределительное устройство выполнено с обратным клапаном и двухходовым золотником, причем выступ штока взаимодействует с выключателем.
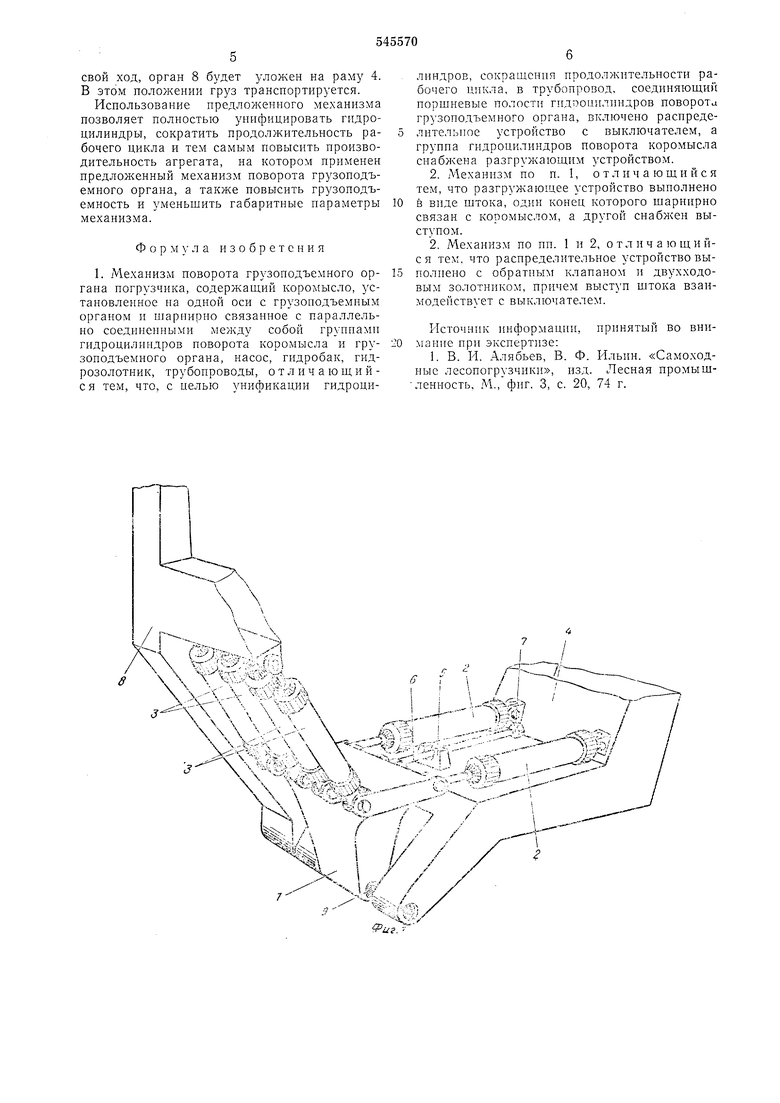
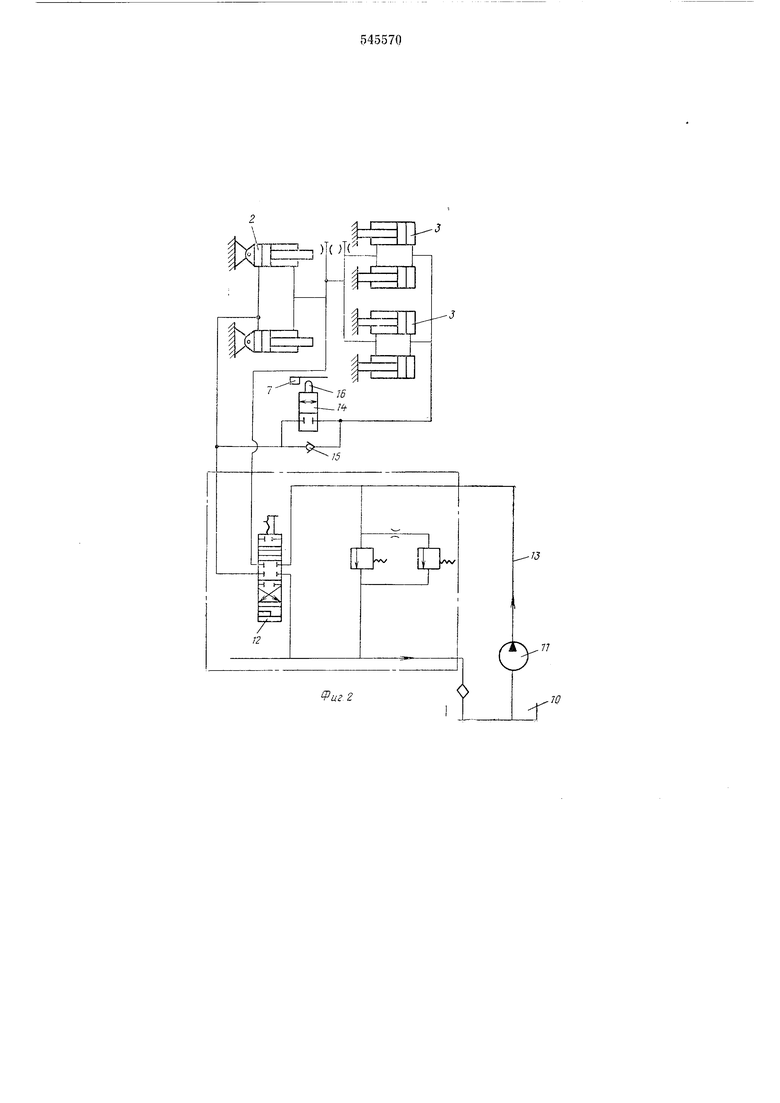
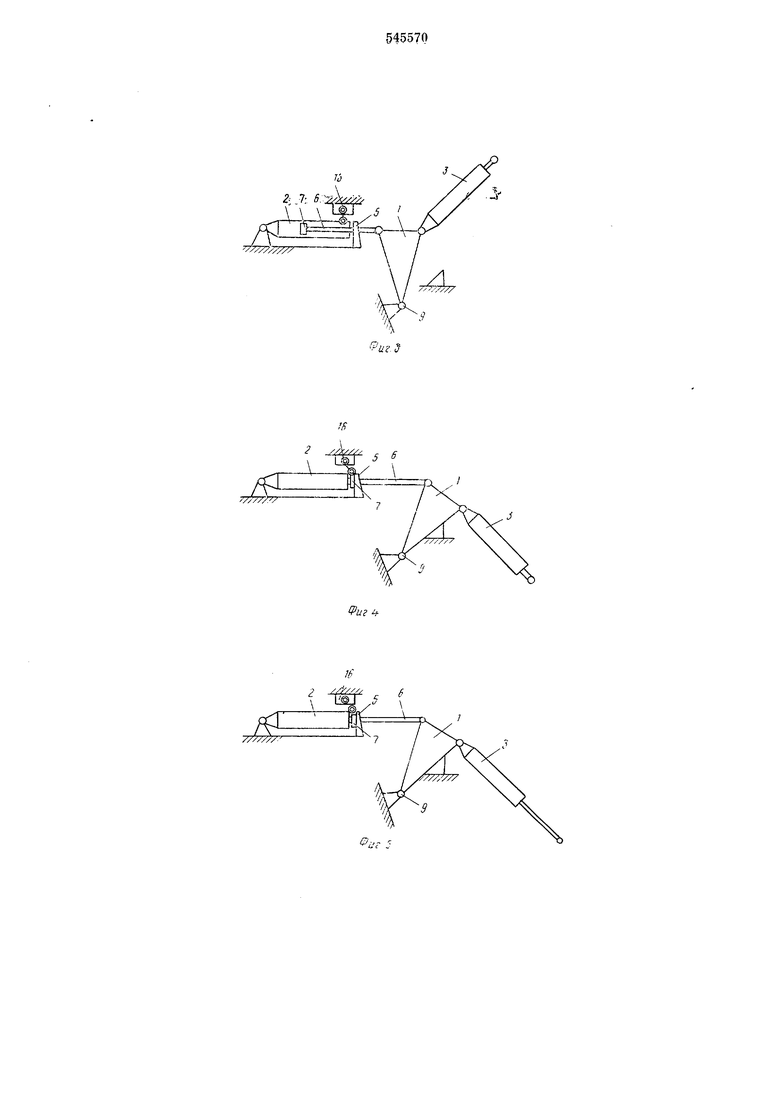
На фиг. 1 изобрах ен иредлагаемый механизм поворота, общий вид; на фиг. 2-принципиальная гидравлическая схема управления механизмом поворота; на фиг. 3-5-вариант выполнения последовательности работы группы гидроцилиндров при опускании груза; на фиг. 6-сплоточно-транспортный агрегат, в котором для подъема и опускания грузоподъемного органа применен предложенный механизм.
Механизм поворота грузоподъемного органа включает коромысло 1, шарнирно связанные с ним и параллельно соединенные между собой группы гидроцилиндров поворота коромысла 2 и поворота грузоподъемного органа 3. Группы гидроцилиндров поворота коромысла 2 и органа 3 содержат различное количество гндроннлиндров, унифицированных по всем параметрам.
Группа гидроцилиндров поворота коромысла 2 шарнирио связана с несущей рамой 4. Параллельно продольной оси этих гидроцилиндров в направляющей 5 установлен разгружающий щток 6, один конец которого щарнирно соединен с коромыслом 1, другой имеет выступ 7, направляющая 5 жестко укреплена на раме 4.
Груцпа гидроцилиндров поворота органа 3 щарннрно соединена с коромыслом 1 и грузоподъемным органом 8, установленным на одной оси 9 с коромыслол 1.
Гидравлическая схема управления группами гидроцилиндров включает гидробак 10, насос 11, гндрозолотник 12, распределительное ЗТтройство, трубопроводы 13.
Распределительное устройство включено в трубопровод, соединяющий поршневые полости гидроцилиндров группы поворота органа 3 и выполнено в виде включенных параллельно друг с другом двухходового золотника 14 и обратного клапана 15.
В данном случае управление двухходовым золотником 14 производится выступом 7 на щтоке 6, воздействующим на выключатель 16 распределительного Зстройства.
Напорные золотники, предназначенные для выполнения функции гидрозамков при аварийных ситуациях, например при обрыве трубопроводов высокого давления, на чертеже не показаны.
Предложенный механизм нрн использовании его в сплоточно-транспортном агрегате для поворота грузоподъемного органа работает следующим образом.
В транспортном положении грузонодъемный орган 8 опирается на раму 4. В этом случае щтоки обоих групп гидроцплиндров втянуты, шток 6 занимает поло кение, указанное на фиг. 1.
При опускании органа 8 рабочая жидкость насосом 11 подается в норшневые полости группы гидроцилиндров поворота коромысла 2, так как золотник 14 распределительного устройства препятствует поступлению рабочей жидкости в поршневые полости гидроцилиндров поворота органа 3. Штоковые полости гидроцилиндров поворота коромысла 2 через гидрозолотник 12 сообщаются с гидробаком 10. Под воздействием рабочей жидкости щтоки гндроцилиндров поворота коромысла 2 поворачивают коромысло 1, которое в свою очередь поворачивает орган 8 с рамы 4. В конце хода поршней гидроцилиндров поворота коромысла 2 выступ 7 щтока 6 взаимодействует с выключателем 1-6 и переключает золотник 14 распределительного устройства. Далее шток 6 упирается в направляющую 5 выступом 7,
ripii этом рабочая жндкость поступает в порниювые полости гндроцилиидров поворота орга.ча 3, а с.ИП рабочей жидкости ИЗ щтокоБых полостей происходит через гидрозолотник 12 в гидробак 10. Под воздействием рабочей жидкости щтоки гидроцилиндров поворота органа 3 поворачивают орган 8 до крайнего положения.
Причем поворот грузоподъемного органа этой группой гидроцилиндров происходит медленней, так как количество гидроцилиндров в этой группе больше, а количество рабочей жидкости, подаваемой насосом, остается прежним.
Шток 6, упираясь выступом 7, выполненным на свободном конце, в направляющую 5 воспринимает на себя часть нагрузки, оказываемую органом 8 па гидроцилиндры поворота коромысла 2 и соответствующую нагрузке на дополнительные гидроцилиндры группы поворота органа 3.
Для поворота и укладки органа 8 на раму 4 необходимо гидрозолотник 12 переключить в положение «подъем. Рабочая жидкость насосом И подается в штоковые полости гидроцилиндров обоих групп: группу поворота органа 3 и группу поворота коромысла 2. Однако работать начинает группа гидроцилиндров поворота органа 3, хотя и нагрузка на эту группу гидроцилиндров в начальный момент поворота органа 8 будет наибольшей. Такая последовательность обеспечивается тем, что гидроцилиндры обеих групп унифицированы по всем параметрам, а число гидроцилиндров в группе поворота органа 3 больше, чем в группе поворота коромысла 2 и каждый из этих гндроцилиндров бздет испытывать меньшую нагрузку, чем гидроцилиндры группы поворота коромысла 2. Таким образом, рабочая жндкость встречает меньшее сопротивление при заполнении полостей гидроцилиндров группы поворота грузоподъемного органа. Слив рабочей жидкости пз поршневых полостей группы поворота органа 3 осуществляется через клапан 15 и гидрозолотник 12, а из поршневых полостей гцдроцилиндров поворота коромысла - через гидрозолотник 12.
Штоки гидроцилиндров органа 3 втягиваются и поворачивают орган 8.
После того как штоки гидроцилпндров поворота органа 3 выберут свой ход, рабочая жидкость устремится в штоковые полости гидроцилиндров поворота коромысла 2 и дальнейший поворот органа 8 ос ществляется гидроцилиндрами этой грунны. Причем дальнейший поворот грузоподъемного органа этой группой гидроцилиндров осуществляется быстрее. Кроме того, для дальнейшего поворота органа 8 до рамы 4 требуется меньщее усилие, так как к моменту включения в работу этой грунны гидроцилиндров изменится положение центра тяжести органа 8 относительно оси 9. Когда щтоки гидроцилиндров поворота коромысла 2 полностью выберут
свой ход, орган 8 будет уложен на раму 4. В этом положении груз транспортируется.
Использование предложенного механизма позволяет полностью унифицировать гидроцилиндры, сократить продолжительность рабочего цикла и тем самым повысить производительность агрегата, на котором применен предложенный механизм поворота грузоподъемного органа, а также повысить грузоподъемность и уменьшить габаритные параметры механизма.
Формула изобретения
1. Механизм поворота грузоподъемного органа погрузчика, содержащий коромысло, установленное на одной оси с грузоподъемным органом и шариирно связанное с параллельно соеднненными между собой группами гидроцилиндров поворота коромысла и грузоподъемного органа, насос, гидробак, гидрозолотник, трубопроводы, отличающийс я тем, что, с целью унификации гидроцилиндров, сокращения продолжительности рабочего цикла, в трубопровод, соединяющий порщневые полости гидоопилиндров поворота грузоподъемного органа, включено раснределительиое устройство с выключателем, а группа гидроцилиндров поворота коромысла снабжена разгружающим устройством.
2. Механизм по п. 1, отличающийся тем, что разгружающее устройство выполнено
в виде гнтока, один конец которого щарнирно связан с коромыслом, а другой снабжен выступом.
2. Механизм по пп. 1 и 2, отличающийся тем, что распределительное устройство выполпено с обратным клапаном и двухходовым золотником, причем выступ щтока взаимодействует с выключателем.
Источник информации, принятый во внимаиие при экспертизе:
1. В. И. Алябьев, В. Ф. Ильин. «Самоходные лесопогрузчики, изд. Лесная промыщленность, М., фиг. 3, с. 20, 74 г.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод погрузчика | 1983 |
|
SU1154423A1 |
| Многозахватный гидравлический подъемник | 1983 |
|
SU1122802A1 |
| Гидропривод погрузчика | 1982 |
|
SU1084392A1 |
| Транспортное средство для перевозки длинномерных грузов | 1987 |
|
SU1516397A1 |
| Гидравлическое следящее устройство для управления грузоподъемным краном | 1969 |
|
SU438603A1 |
| Гидропривод ходового оборудования шагающего экскаватора | 1986 |
|
SU1458515A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1992 |
|
RU2092658C1 |
| Гидропривод рабочего органа бульдозера | 1990 |
|
SU1763592A1 |
| Устройство для натяжения арматуры | 1978 |
|
SU754029A1 |
| Гидравлический привод опрокидывающего механизма автомобиля-самосвала | 1989 |
|
SU1743941A1 |

/.-г. ii %vA:f::i . 4. .. V ( N - ..,, s - j f- r:::-- , 3;ГП ... Г I , , , . .,.,.. f. ,- - V-s ---4 9t - , . ...:.
OK:
Z3,)
11
a
J6 /4
Vuz2
Ш
W
r
