1
Изобретение относится к оборудованию для текстильной и химической промышленности.
Известно устройство для автоматической перезаправки нити, содержащее исполиительный рычаг (манипулятор), имеющий наклонную нитенаправляющую поверхность, бобины, установленные с возможностью вращения и имеющие канавки для захвата нити и ее последующего обрыва при вращении бобин, и привод со средствами его управления (1).
Иедостатком указанного устройства является сложность перезаправки нити, так как в процессе перезаправки участвует также револьверная головка, перемещающая бобины. Функция нитенаправляющего устройства, как устройства по перезаправке нити, сводится лищь к смещению нити в сторону от рабочего положения в момент смены револьверной головкой бобин с последующим сбросом нити на пустую бобину.
Известен также манипулятор для автоматической перезаправки нити, например, к прядильным машинам, содержащий двуплечий рычаг, на одном из плеч которого смонтирован нитезахватывающий орган, а другим плечом кинематически связан с приводом для его поворота (2).
Недостатком указанного манипулятора является невозможность скоростной перезаправки нити и изменения траектории движения нитезахватывающего органа при использовании бобин, имеющих канавки для захвата нити.
Для расширения технологических возмол ностей предлагаемый манинулятор имеет стойку
и привод для ее поворота, а двуплечий рычаг соединен со стойкой посредством шарнира, ось которого расположена в плоскости, перпендикулярной к стойке; при этом приводы для поворотов двуплечего рычага и стойки
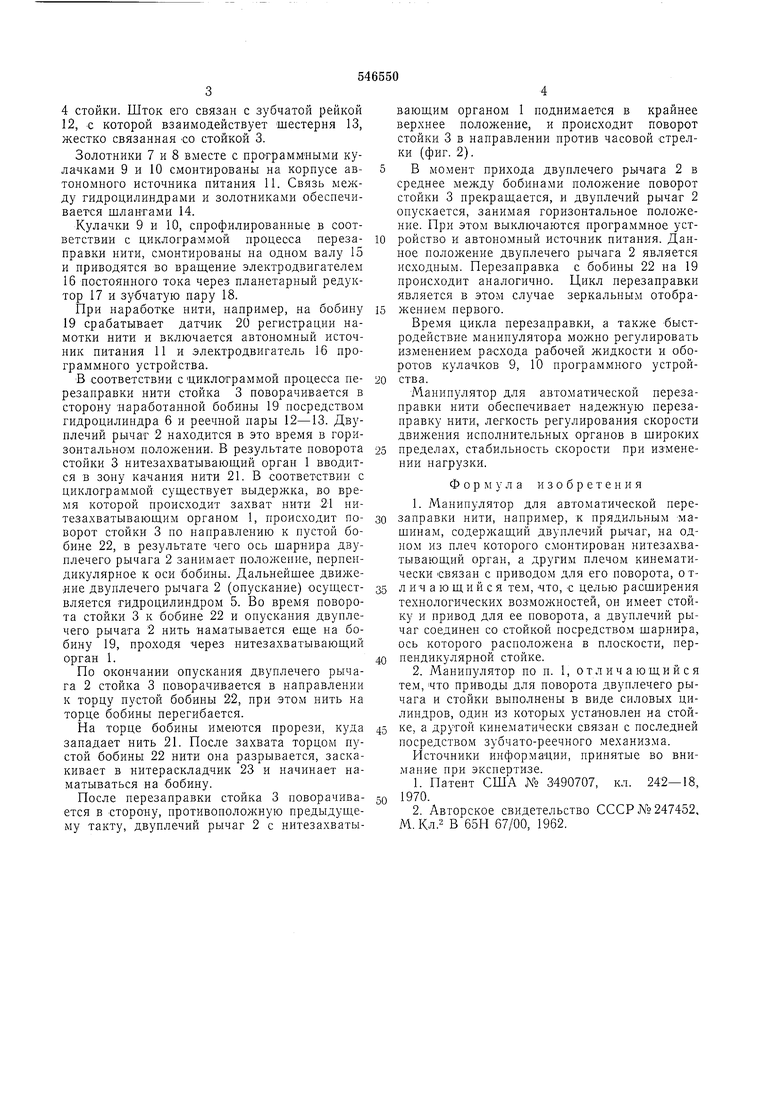
могут быть выполнены в виде силовых цилиндров, один из которых установлен яа стойке, а другой кинематически связан с последней посредством зубчато-реечного механизма. На фиг. 1 изображен описываемый манипулятор, вид спереди; на фиг. 2 - вид сверху части мгпчипулятора без программного устройства и автономного источника питания.
Манипулятор состоит из нитезахватывающего органа 1 на двуплечем рычаге 2, смонтированном на стойке 3, основания 4 стойки 3, двух гидроцилиндров 5 и 6, двух золотников 7 и 8, программного устройства, выполненного в виде кулачков 9 и 10, автономного источника питания 11.
ГидроцилиНдр 5, обеспечивающий наклон двуплечего рычага 2, закреплен на стойке 3, и шток его непосредственно связан с меньшим плечом двуплечего рычага 2. Гидроцилиндр 6, обеспечивающий поворот стойки 3
вокруг своей оси, закреплен на основании
4 стойки. Шток его связан с зубчатой рейкой 12, € которой взаимодействует шестерия 13, жестко связанная со стойкой 3.
Золотники 7 и 8 вместе с программными кулачками 9 и 10 смонтированы на корпусе автономного источника питания 11. Связь между гидроцилиндрами и золотниками обеспечивает-ся шлангами 14.
Кулачки 9 и 10, спрофилированные в соответствии с циклограммой процесса перезаправки нити, смонтированы на одном валу 15 и приводятся во вращение электродвигателем 16 постоянного тока через планетарный редуктор 17 и зубчатую пару 18.
При наработке нити, например, на бобину 19 срабатывает датчик 20 регистрации намотки нити и включается автономный источник питания 11 и электродвигатель 16 программного устройства.
В соответствии сциклограммой процесса перезаправки нити стойка 3 поворачивается в сторону наработанной бобины 19 посредством гидроцилиндра 6 и реечной пары 12-13. Двуплечий рычаг 2 находится в это время в горизонтальном положении. В результате поворота стойки 3 нитезахватывающий орган 1 вводится в зону качания нити 21. В соответствии с циклограммой существует выдержка, во время которой происходит захват нити 21 нитезахватывающим органом 1, происходит поворот стойки 3 по направлению к пустой бобине 22, в результате чего ось шарнира двуплечего рычага 2 занимает ноложение, перпендикулярное к оси бобины. Дальнейшее движение двуплечего рычага 2 (опускание) осуществляется гидроцилиндром 5. Во время поворота стойки 3 к бобине 22 и опускания двуплечего рычага 2 нить наматывается еще на бобину 19, проходя через нитезахватывающий орган 1.
По окончании опускания двуплечего рычага 2 стойка 3 поворачивается в направлении к торцу пустой бобины 22, при этом нить на торце бобины перегибается.
На торце бобины имеются прорези, куда западает нить 21. После захвата торцом пустой бОбины 22 нити она разрывается, заскакивает в нитераскладчик 23 и начинает наматываться на бобину.
После перезаправки стойка 3 поворачивается в сторону, противоположную предыдущему такту, двуплечий рычаг 2 с нитезахватывающим органом 1 поднимается в крайнее верхнее положение, и происходит поворот стойки 3 в направлении против часовой стрелки (фиг. 2).
В момент прихода двуплечего рычага 2 в среднее между бобинами положение поворот стойки 3 прекращается, и двуплечий рычаг 2 опускается, занимая горизонтальное положение. При этом выключаются программное устройство и автономный источник питания. Данное положение двуплечего рычага 2 является исходным. Перезаправка с бобины 22 на 19 происходит аналогично. Цикл перезаправки является в этом случае зеркальным отображением нервого.
Время цикла перезаправки, а также быстродействие манипулятора можно регулировать изменением расхода рабочей жидкости и оборотов кулачков 9, 10 программного устройства.
Манипулятор для автоматической перезаправки нити обеспечивает надежную перезаправку нити, легкость регулирования скорости движения исполнительных органов в широких
пределах, стабильность скорости при изменении нагрузки.
Форм}л а изобретения
1.Манипулятор для автоматической перезаправки нити, например, к прядильным .машинам, содержащий двуплечий рычаг, на одном из плеч которого смонтирован нитезахватывающий орган, а другим плечом кинематически связан с приводом для его поворота, отл иЧ а ю щи и с я тем, что, с целью расширения технологических возможностей, он имеет стойку и привод для ее поворота, а двуплечий рычаг соединен со стойкой посредством шарнира, ось которого расположена в плоскости, перпендикулярной стойке.
2.Манипулятор по п. 1, отличающийся тем, что приводы для поворота двуплечего рычага и стойки выполнены в виде силовых цилиндров, один из которых установлен на стойке, а другой кинематически связан с последней посредством зубчато-реечного механизма.
Источники информации, принятые во внимание при экспертизе.
1.Патент США № 3490707, кл. 242-18, 1970.
2.Авторское свидетельство СССР Х 247452. М.Кл.2 В 65П 67/00, 1962.
2/
ipua.f
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической заправки нити на мотальной машине | 1981 |
|
SU1006352A1 |
| Устройство для перезаправки револьверной мотальной головки | 1987 |
|
SU1461740A2 |
| Устройство для перезаправки револьверной мотальной головки | 1989 |
|
SU1662914A1 |
| Устройство для непрерывной намотки нити | 1982 |
|
SU1110733A1 |
| Способ герметизации межпанельных стыков | 1989 |
|
SU1719576A1 |
| Устройство для перегрузки паковок с намоточных машин | 1982 |
|
SU1043091A1 |
| Устройство для съема бобин на текстильной машине | 1989 |
|
SU1675181A1 |
| Устройство для перезаправки мотальной машины | 1980 |
|
SU927704A1 |
| Автоматическое мотальное устройство | 1977 |
|
SU825437A1 |
| Устройство для непрерывной намотки нити | 1983 |
|
SU1137046A1 |


