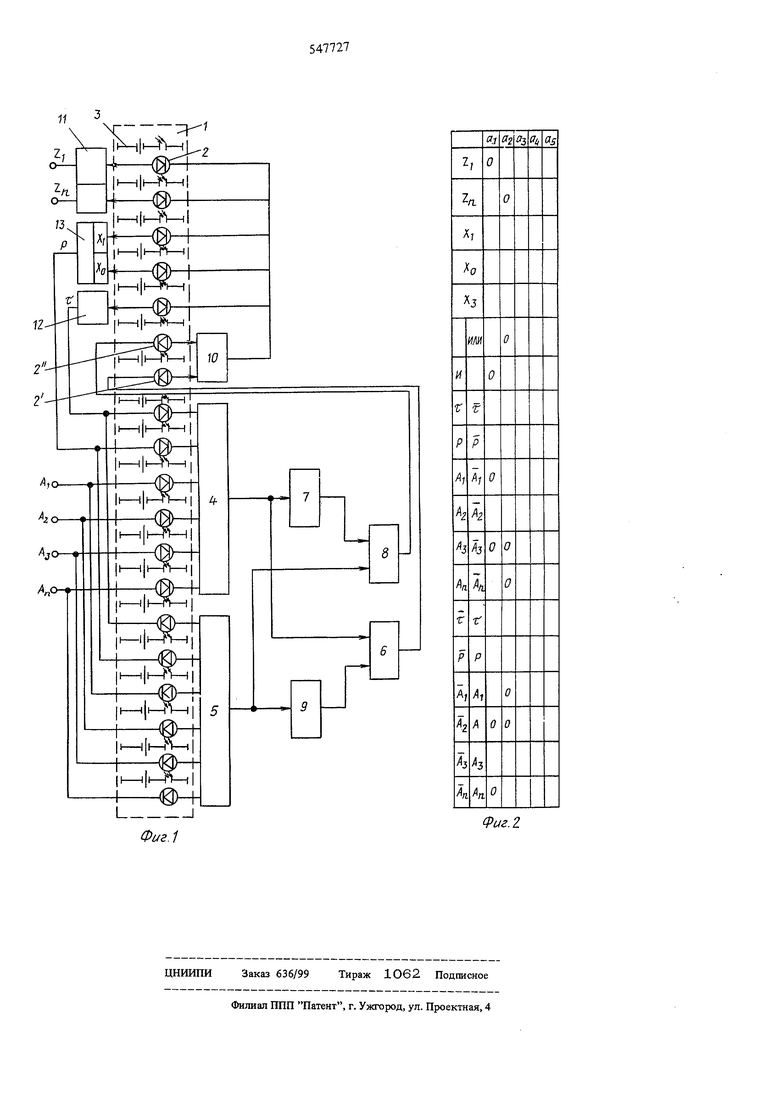
(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ ством любых логических функций, содержащих в качестве аргументов переменные как прямого, так и. инверсного значения. Для реализации логической операции конъюнкция, например, вида Zp AI А2АзА4 в этом устройстве ее необход 1мЬ преобразовать к виду: 2н АгА2:-Аэ-А4-А + где А|, А,, А., А .-символы входных переменных с прямыми и инверсными значениями, что требует инвертирования входных сигналов. Для реализации логической операции дизъюнкция, например, вида +А 2+А j,+A требуется также инвертирование входных сигналов от переменных А 2 и А. Целью изобретения является упрощение устройства для автоматического управления производственными процессами за счет умепьщения количества элементов схемы. Это достигается тем, что устройство содержит два элемента И и третий элемент ИЛИ, причем входы устройства соединены с п последующими входами программного б.лока, последние (п+2) выхода которого соединены со входами первого элемента И, выход первого элемента И соединен с первым входом второго элемента И и через первый элемент НЕ-с первым входом третьего элемента ИЛИ, выход которого соединен с (2п+8)-м входом программного блока, выход второго -элемента ИЛИ соединен со вторым входом третьего элемента ИЛИ и через второй элемент НЕ-со вторым входом второго элемента И, выход которого соединен с (2п+9)-м входом программного блока, выход блока памяти соединен с (2п+10)-м входом программного блока, выход блока задержки соединен с (2п+11)-м входом программного блока. При такой схеме связей реализация логической операции конъюкции, например, вида АЗ X Аз Ад осуществляется следующим образом: Zp AI-А2Аз-54- AiAsAiA 4 (А1-Аз)-(А2 + + А4), а онерация дазъюнкция, например, вида Zm A-i + АЗ+ А4, таким образом: Z AI + + АЗ +A4 (Ai +А2) +(Аз +А4) (Aj н-А2) + +(Аз-А4). На фиг. 1 изображена функциональная схема устройства для автоматического управления производственными процессами: на фиг. 2 -развернутая программная таблица состояний. Устройстео состоит из программного блока 1, содержащего приемники информации 2, программирование которых осзоцествляется при помощи программоносителя 3. Каждому входному каналу А J - АП соответствует два выхода, один из которых подсоединен ко входу приемника информации, выход которого подсоединен к одному из входов элемента И 4, а второй выход подсоединен ко входу приемника информации, выход которого подсоединен к одному из входов элемента ИЛИ 5 Выход элемента И 4 соединен непосредственно с одним из входов элемента И 6 и через инвертор НЕ 7 с одним из входов элемента ИЛИ 8. Выход элемента ИЛИ 5 соединен непосредственно со вторым входом элемента ИЛИ 8 и через инвертор НЕ 9-со вторым входом элемента И 6. Выходы элементов И 6 и ИЛИ 8 через приемники информации 2 и 2 объединены между собой по схеме ИЛИ 10, выход которой при помощи приемНИКОВ информации соединен со входами блоков вьтода 11, задержки 12, памяти 13. Выходы блоков задержки и памяти соединены посредством приемников информации со входами элементов И 4 и ИЛИ 5, причем каждый выход блоков задержки и памяти соединен непосредственно с одним из элементов И 4 и ИЛИ 5. Программный блок 1 представляет собой коммутатор сигналов, который может быть вьшолнен в виде механического устройства с вращающимися пpoгpaммoнocитeля ш 3 в виде, например, диска или цилиндра с выбитыми на нем отверстиями по определенной программе согласно заданному алгоритму управлеьшя, чем обеспечивается разрешение или запрещение прохождения сигнала через приемники информации, вьшолненные, например, в виде фотодиодов. В качестве источников сигналов могут быть использованы световые лучи, воздущньш поток, магнитная энергия, импульсы электрического тока, ядерное излучение. Приемник информации 2 представляет собой элемент с ключевой характеристикой, в качестве которого могут быть использованы фотоэ.лементы, пневмо элементы, элементы магнитной техники, детекторы ядерного излучения. Блок вывода 11 представляет собой набор из нескольких выходных усилителей и вьшолняет функции усиле1-шя выходных сигналов. Блок задержки 12 представляет собой набор из нескольких элементов задержки с входами включения X .J и выходами . Блок вьшолняет функции задержки сигналов. Блок памяти 13 представляет собой набор из нескольких элементов памяти, каждьш из которых имеет входы включения X , входы отключения XQ и ВЫХОДЫ Р. Блок вьшолняет функции запомиXнания сигналов. Предложеное устройство реализует алгоритмы управления, представленные совокупностью логических и временных функций дизъюнктивной или конъюнктивной формы. Таблица состояний (фиг. 2) имеет строки и столбцы, в которых программируются значения отдельных входньгх и выходных сигналов, а также вид реализуемой операции (конъюшсция или дизъюнкция). Входные строки А, P,fA, Р, Т предназначены для программирования ожидаемых прямых сигналов (сигнал до.пжен быть) и ожидаемых инверсных сигналов (сигнал отсутствует) от переменных А, РиГ. Выходные строки предназначены для программирования значений одной из переменых X Две промежуточные строки таблицы предназначены для программирования вида реализуемой операции И или ИЛИ, причем в каждом столбце программируется вьшолнение только одной операции. Каждый столбец таблицы состояний а ,а,,...а соответствует одному состоянию системы (такту) и предназначен для программирования значений входных переменых и сотвествующих им значений выходных переменных. Запрограммированные наборы тактовых состояний системы отображают технологический цикл автоматизируемого процесса управления. Работа устройства для автоматического управления производственными процессами заключается в следующем. Входные сигналы от технологических датчиков поступают на входы А--А. Каждый из входных сигналов поступает одновременно на входы двух приемников информации 2, программирование которых осуществляется в соответствии с программной таблицей состояний на программоносителе 3, программного блока 1, работа которого заключается в непрерывном перемещении программоносителя над соотвествующими приемниками информации в соотвествии с программной табтшцей состояний. Выходные сигналы с запрограммированных приемников информации поступают на входы элементов И 4 и И1Ш 5, на каждом из которых при реализации операции конъюнкция, происходит совпадение отдельно ожидаемых прямых ( на элементе И 4) и инверсных (на элементе ИЛИ 5) сигналов, а при реализации операции дизъюнкция эти элементы выполняют, соответственно, логические операции- положительное и отрицательное ИЛИ. Выходные сигналы с элементов И 4 и ИЛИ 5 поступают непосредственно на первые входы соответственно элементов И 6, ИЛИ 8 и через инверторы НЕ 7, НЕ 9 на вторые входы элементов ИЛИ 8, И 6, таким образом, при реализации операции конъюнкция выходной сигнал появляется на выходе элемента И 6, а при реализации операции дизъюнкция - ш выходе элемента ИЛИ 8. Выходные сигналы с элементов И 6 или ИЛИ 8 поступают на соответствующие входь приемников информации 2 , 2 , которые программируются в соответствии с программной таблицей состояний. Выходные сигналы с приемником информации 2 или 2 поступают на входы элемента ИЛИЮ, выход которого через запрограммированные приемники информации воздействует на входы блоков вьтода 11, задержки 12 и памяти 13. Усиленные выходные сигналы с блоков вьтода воздействуют на исполнительные устройства, а выходные сигналы с блоков задержки и памяти в виде обратной связи заводятся на входы приемников информации аналогично входному сигналу. Принцип работы схемы устройства для автоматического управления производственными процессами рассмотрим на конкретном примере. Допустим, необходимо реализовать операцию конъюнкцию, в следующем виде: Z, А,-А,-Л,-АП. Для этого необходимо запрограммировать два приемника информации, соответствующие входам А J , А J в группе ожидаемых прямых сигналов и два приемника информации, соответствующие входам А2,А,в группе ожидаемых инверсных сигналов. Таким образом при наличии сигналов на входе образовавщегося двухвходового элемента И 4 появляется сигнал 1, а при отсутствии сигналов на входах А „ и А на выходе образовавшегося дзухвходового элемента ИЛИ 5 появляется сигнал О , которьаЧ после инвертирования на элементе НЕ 9 преобразовывается в 1 и совместно с 1 от элемента И 4 поступают на входы элемента И 6, единичный выход которого через запрограммированны гфиемник информации 2 , соответствующий операции конъюнкция, поступает на вход элемента И;ТИ 10. Вьгходной сигнал 1 с элемента ИЛИ 0 поступает на вход блока вывода 11 через запрограмгущрованньш приемник информации 2. Для реал11заци1 операции дизъюнкция, записанной, HanpiiNicp, в виде , +А, +А, +АП, необходклто запрограм 1ировать два приемника информации, соответствующие входам А, А, в Группе ожидаемых инверсных сигналов и два приемника информации, соответствующие входам АЗ , АП в группе ожидаемых прямых сигналов. Таким образом, при наличии сигналов Г ш входах А, или А на выходе элемента ИЛИ 5 появляется сигнал 1, а при отсутствии сигнала на одном из входов Ад или А . на выходе элемента И 4 появляется сигнал О, который после инвертирования на элементе НЕ 7 преобразовывается в и совместно с 1 от элемента ИЛИ 5 поступает на входы элемента ИЛИ 8, единичный выход которого через запрограммированный приемник информации 2 , соответствующий операшп дизъюнкция, пост пает на вход элемента ИЛИ 10. Вььхогшой сигнал 1 с элемента ИЛИ 10 поступает на вход блока вьшода II при помощи запрограммированного выходного приемника информации. Технико-экономическая эффект11вность от реа.1шзащ{и изобретения зависит от выбранной элементной базы и количества и типов (типоразмеров в зависимости от количества входной и вььходной информации) устройств, идя автоматического управления ироцессзгущ в угольной и горнорудной промыпшенкости при изготовлешо устройств с количеством входов от 25 до 100 и выще реализация изобретения позволяет экономить от 25 до 100 элементов Ш1 на каглс.чом устройстве.
Формула изобретения
Устройство для автоматического управления производствеными процессами, содержащее элементы НЕ, программный блок, первьш и второй выходы которого соединены через первый элемент ИЛИ с первыми пятью входами программного блока, третий выход которого соединен со входом блока задержки, четвертый и пятьш выходы - со входами блока памяти, а шестой и седьмой выходы - со входами блока вьшода, выход блока памяти соединен с шестым входом программного блока, выход блока задержки соединен с седьмым входом программного блока, и входов устройства соединены с | последующими входами программного блока, (п+2) соответствующих выхода которого соединены со входами второго элемента ИЛИ, о т л и чающееся тем, что, с целью упрощения устройства, оно содержит два элемента И и третий элемент ИЛИ, причем входы устройства соединены : п последуюидами входами программного блока, последние (п+2) выхода которого соединены со входами первого элемента И, выход первого элемента И соединен с первым входом второго элемента И и через первый элемент НЕ с первым входом третьего элемента ИЛИ, выход которого соединен с (2п+8) входом программного блока, выход второго элемента ИЛИ соединен со вторым входом третьего элемента ИЛИ и через второй элемент НЕ со вторым входом второго элемента И, выход которого соединен с (2п + 9) входом программного блока, выход блока памяти соединен с (2n 10) входом программного блока, выход задержки соединен с (2 п +11) входом программного блока.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР №276516, М. Кл. G 06 F 7/00, 1969.
2.Авторское свидетельство СССР №433477, М. Кл. G06 F 7/00,1971.
3.Авторское свидетельство СССР № 300879, М.Кл.О 06 F 5/18, 1969. (прототип).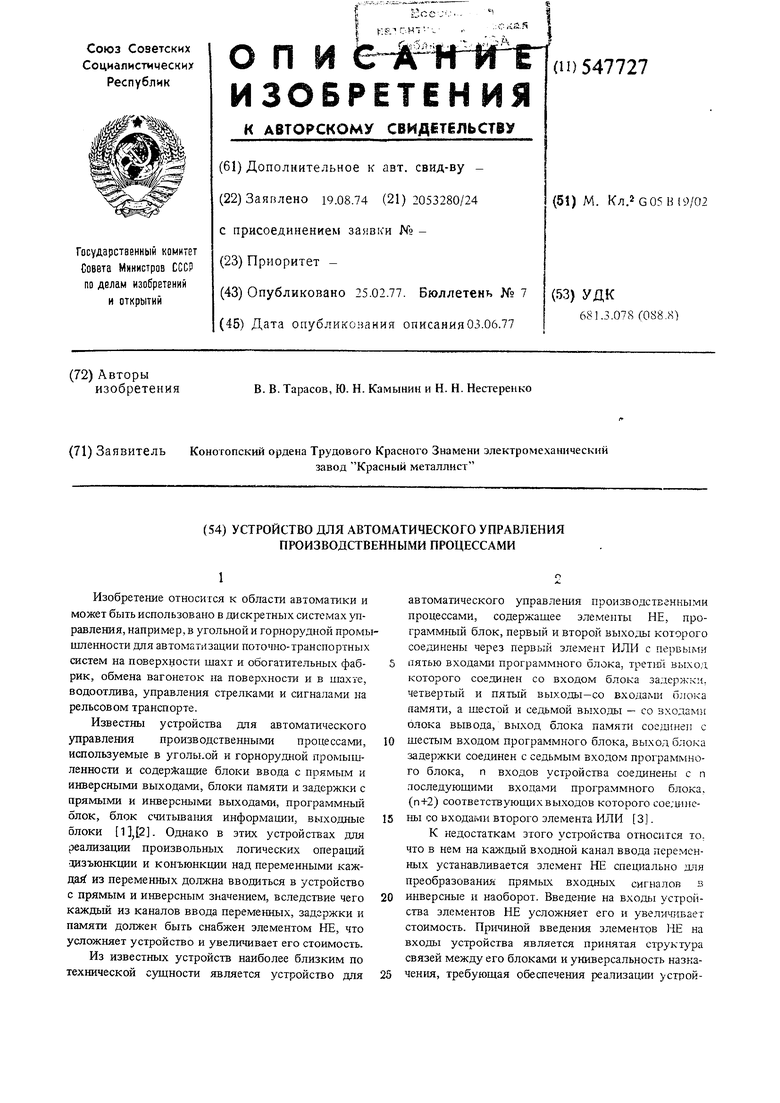

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления производственными процессами | 1984 |
|
SU1208534A1 |
| Устройство для управления производ-СТВЕННыМи пРОцЕССАМи | 1978 |
|
SU807220A1 |
| Устройство для программного управления | 1974 |
|
SU512455A1 |
| Устройство для управления производственными процессами | 1984 |
|
SU1254438A1 |
| Устройство для диагностики системы программного управления | 1976 |
|
SU634241A1 |
| Устройство для программного управления | 1975 |
|
SU648949A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННЫМИ ПРОЦЕССАМИ | 1971 |
|
SU300879A1 |
| ЛОГИЧЕСКИЙ АВТОМАТ | 1970 |
|
SU276516A1 |
| Устройство для построения программируемых логических автоматов | 2023 |
|
RU2814507C1 |
| Устройство для моделирования конечных автоматов | 1980 |
|
SU955080A1 |