Изобретение относится к двухкоординатпым следяп1,им системам программиого управлепия для автоматизации фотограмметрических процессов, а также для автоматизации процессов управлепия стайками.
Известно устройство для программного управления по двум координатам, содержащее блок сравнения, блок задаиия скорости, блок управления, коордипатные приводы подач и датчики I. Наиболее близким техническим реп1ением к изобретению является устройство для двухкоординатного программиого управления, содержащее последовательио соединенные блок задаиия начальной скорости, функциональный преобразователь, первый координатный привод, блок задания программы, блок сравнения и второй координатный привод, подключенный к одиому из входов блока сравнения 2. Однако при любой ошибке, отличной от нуля, быстродействие известного устройства снижается, так как снижается скорость нодачи. Кроме того, в нем при появлении даже незиачительиых ошибок в местах излома отрабатываемого профиля происходит возрастание амплитуды ошибки в результате снижения скорости подачи, что приводит к еще большему снижению скорости и потере производительности.
Целью изобретения является иовышение быстродействия устройства. В оиисываемом
устройстве это достигается тем, что оно содержит первый лииейный элемент с зоной иечувствительиости и последовательно соединенные блок дифференцирования, второй липей5 пый элемент с зоной нечувствительности и сумматор, выход которого подключен к одному из входов функциоиальпого преобразователя, а вход сумматора через первый линейный элемент с зоной нечувствительности сое10 дипен с выходом блока сравнения и входом блока дифференцирования.
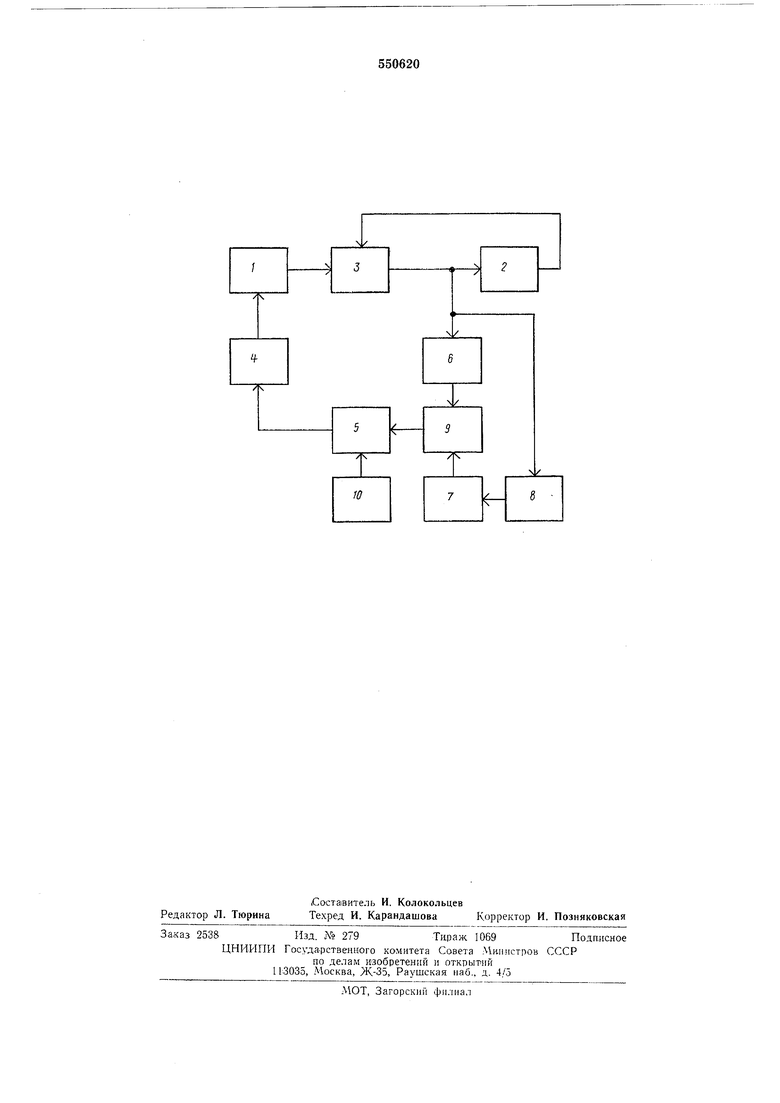
На чертеже представлена функциональная схема описываемого устройства.
Оно содержит блок задаиия программы 1, 5 второй координатный привод 2 ио координате У, блок сраВиения 3, первый координатный привод 4 но координате X, функциональный преобразователь 5, первый 6 и втарой 7 линейные элементы с зоной нечувствительности, 0 блок дифференцирования 8, сумматор 9 и блоК задания начальной скорости 10.
При наличник сигнала la выходе блока задания нрограммы 1 па выходе блока сравнения 3 появляется оилнал ошибки, который 5 отрабатывается приводом 2 по координате У. Одновременно сигаал ошибки поступает на вход линейного элемецта 6 и блока дифферанцироватия 8, с выхода которого прод ифференцированный сигнал ошибки подается На вход второго линейного элемента 7. При превышеИНН снпиалом ошибки или его ираиэводиой зоны иечу|Вс,гвителыюст1и элементов 6 и 7 на выходе их появляются сигналы, которые CVMIMIHруются сумматором 9 и иодаются на -вход фу|НКциана.льного иреобразователя 5, в котором праиз1во;дится изменение вел,ичины око)ости подачи по координате X, поступающей из блока задания начальной скорости 10 па второй вход преобразователя 5. Полученное требуемое з-начение окороСТ И подачи с выхода функцианального преобразователя 5 подается на вход привода 4 но коорд|И1нате X, выход которого унравляет ра|ботой блока .ия програ ммы 1, задерживая или ускоряя выдачу даиных о требуемом движении но координате У.
Применение линейных элементов с зоной нечувствителыности, блока дифференцирования и сумматора существенно отличает описываемое устройство от известных, так как привод но координате X оказывается нечувствительным к нзл1е1ивн1ия:м ошибки по координате У в донустимых пределах, которые устаиавливаются зонами иечу1ВСТ1вительности линейных элементов. В результате при медленном нарастании ошибки предотвращение ее роста производится изменением око-рости подачи через ка1иал с линейным элементом 6, в местах с резк1им изломОМ обра батьиваемого профиля, где возможно поя|вление значительных ошибок, осуществляется учреждающее изменение скорости .подачи через ка1нал с элементом 7, а при величинах ошибки, не превышающих устаиовленные зиачения, cKopoiCTb подачи остается ма.ксимальной, что приводит к повышению оыстродеиствия устройства.
При.меиение описьвваемого устройслва в стапках с програм,мным управлением нозволяет новысить производительность станка в 1,2 - 1,5 р-аза, в зааиси.мости от характера обра б а т ыв а аМОГ о нр оф|И л я.
Формула изобретения
Устройство для двухкоординатиого программного управления, содержащее последовательно соедшюнные блок задания начальной скорости, фуекционалыный преобразователь, первый координатный привод, блок заДания нрограммы, блок сравнения и второй координатный привод, подключенный к одному из входов блока сравнения, отличающееся тем, что, с целью повышения быстродействия устройства, оно содержит
линейный элемент с зо:ной нечувствительности и последовательно соединеиные блок дифференцирования, второй линейный элемент с зоной нечувствительности и сумматор, выход которого подключен к одному из
входов функционального преобразователя, а вход сумматора через первый линейный элемент с зоной нечувствительности соединен с выходО.м блока сравнения и входом блока диф ф ер ей дир ов ания.
Источники И1иформации, принятые во вни мавие при экспертизе:
1.Авторское свидетельство СССР Хо 429416, М. Кл.2 G 05В 19/04, 1973.
2.Аидрейчиков Б. П. Динамическая точпость систем пропрам1много управления. М.,
Мащшгостроение, 1964, с. 192-214.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Следящая система | 1975 |
|
SU585474A1 |
| Устройство для считывания графической информации | 1977 |
|
SU1339603A1 |
| Устройство для считывания графической информации | 1977 |
|
SU1208570A1 |
| Устройство для программного управления | 1986 |
|
SU1345169A2 |
| Двухканальное программно-задающее устройство | 1982 |
|
SU1133584A1 |
| Линейно-круговой интерполятор | 1976 |
|
SU670923A1 |