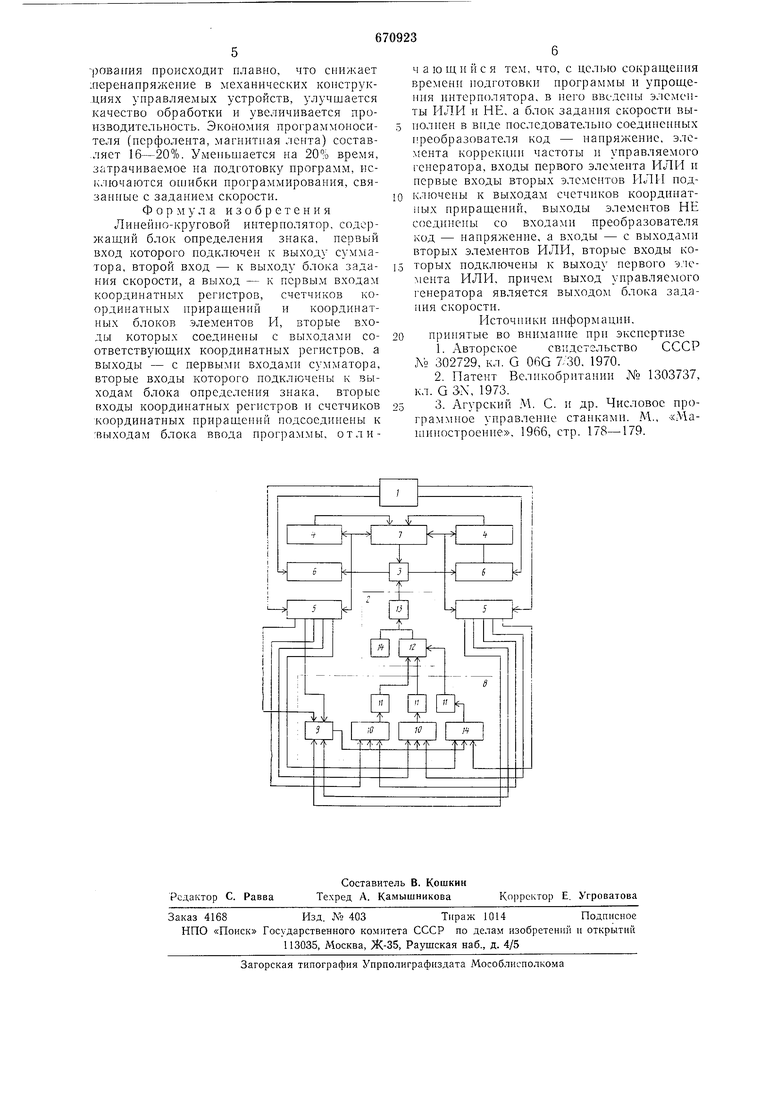
На чертеже приведена функциональная схема интерполятора.
Линейно-круговой интерполятор содержит блок ввода программы 1, блок задания скорости 2, блок определения знака 3, координатные блоки элемеитов И 4, счетчики координатных нриращений 5, координатные регистры 6, сумматор 7, логический блок 8, содержащий первый элемент ИЛИ 9, вторые элементы ИЛИ 10 и элементы НЕ 11, а блок задания скорости содержит преобразователь код-напряжение 12, управляемый генератор 13 и элемеит коррекции частоты 14.
Иреобразователь код-напряжение 12 вынолнен, например, на резисторах. В качестве элемента 14 может использоваться конденсатор, а генератор 13 может быт выполнен на основе двухкаскадного неинвентирующего усилителя постоянного тока с времязадающим конденсатором в цепи э.митеров каскада, включенного ио схеме с общей базой и каскада с общим коллектором. В цепи разряда времязадающего конденсатора включено управляемое напряжеиием сопротивлеиие.
Выходная характеристика генератора 13 описывается выражением
)- /„ + /г|/ЛГ(1)
где /о - начальная частота; к - коэффициеит нропорциональиости; Л - код на входе преобразователя 12.
Работа интерполятора происходит следующим образом. Устанавливаются в нулевое ноложение счетчики 5, регистры 6 и сумматор 7. На входы преобразователя поступают нулевые потенциалы. Выходное иапряжение преобразователя 12 имеет минимальное значение. Генератор 13 вырабатывает импульсы с частотой /о. Через блок 1 в счетчики 5 заносятся коды, соответствующие требуемым перемещениям по оси X и У. Иосредством логического блока 8 анализируются коды, занесенные в счетчики. Ири этом возможны следующие случаи: 1) единичные значения кодов есть в одном из старших разрядов любого из счетчиков 5; 2) единичных значений кодов нет в старших разрядах счетчиков 5, но они есть в любом из средних разрядов; 3) единичных разрядов нет в старших и средних разрядах счетчиков 5.
В первом случае на одном или нескольких входах элемента ИЛИ 9 будет скачком установлен нулевой потенциал, который проинвертируется элементами НЕ 11 и поступит на входы блоков задания скорости 2, т. е. на все разряды преобразователя 12. Напряжение иа входе генератора 13 начнет экспоненциально возрастать (по абсолютной величине). Частота генератора 13, а следовательно и скорость интерполирования, также будет возрастать по закону
/-fo + K УЛ-(1
М
(2)
где Т - постоянная элемента 14. Таки.м образом, выходная частота блока задания скорости 2 будет изменяться по закону, близкому к экспоненциальному. Темн разгона будет онределяться параметрами элемента 14.
В процессе интерполирования код в счетчиках 5 уменьшается. Выходная частота блока задания скорости 2 не изменяется .то тех иор, пока в старших разрядах счетчиков 5 будут единицы. Носле установки
нулей в старших разрядах счетчиков 5 частота генератора 13 начинает изменяться по закону
f l, + KYN,+ ;с( КД,- l/Ai)
Такнм образом, выходная частота блока задания скорости 2 плавно изменяется ио закону, близкому к закону квадратичной параболы.
25 В случае, когда в старших разрядах счетчиков 5 нет кода, но он.есть в одном из средних разрядов, в первых п тактах интерполирования происходит увеличение выходной частоты блока задаиия скорости 2 согласно закона (2), где п - информационная емкость младших (l-rS) разрядов счегчиков 5. Следующие п тактов интерполировавания скорость интерполирования из.меняется по закону
35 -jf2 h + K}/N - -(-e -t-,-/,
- Kl/7v (1-е/ ) (1 -е
(4)
Аналогично, каждой последующей / ступени п тактов интерполирования будет соответствовать частота
f / /о + /с 1/Л - 1 (1 ) -... +
- t-tt -
(-1) (-e
-с). (5)
Момент окончания увеличения и начала
уменьщения скорости интерполирования на50 ступит при равенстве достигнутой и заданной частот.
. к|/Л-г + /о.(6)
Далее процесс понижения частоты интерполирования будет протекать аналогично вышеизложенному (3).
В случае, когда единичных значений кодов нет в старших и средних разрядах счетчиков 5, интерполирование происходит с начальной скоростью, соответствующей частоте rfo.
В результате применения предложенного
решения экономия оборудования составляет
24 ячейки ЭВМ «Минск-32 стоимостью
356 рублей. Изменение скорости интерполировапия происходит плавно, что спижает лерепапряжеиие в мехапических конструк„циях управляемых устройств, улучшается качество обработки и увеличивается пропзводительпость. Экономия программоносителя (перфолента, магнитная лента) состав.ляет 16-20%. Уменьшается на 20% время, затрачиваемое на подготовку программ, исключаются ошибки программирования, связанные с заданием скорости.
Формула изобретения Линейно-круговой интернолятор, содержащий блок определения знака, первый вход которого подключен к выходу сумматора, второй вход - к выходу блока задак первым входам
ния скорости, а выход счетчиков кокоординатных регистров, ординатных приращений и координатИ, вторые вхоных блоков элементов с выходами соды которых соединены ответствующих координатных регистров, а выходы - с первымп входами сумматора, вторые входы которого подключены к выходам блока определения знака, вторые входы координатных регистров и счетчиков координатных приращений подсоединены к гвыходам блока ввода программы, отличаю щ и и с я тем, что, с целью сокращения времени подготовки программы и упрощения интерполятора, в него введены элементы Р1ЛИ и НЕ, а блок задания скорости выполней в виде последовательно соединенных преобразователя код - панряженне, элемента коррекции частоты и управляемого генератора, входы первого элемента ИЛИ и нервые входы вторых элементов ИЛИ подключены к выходам счетчиков координатiibix нриращений, выходы элементов ИЕ соединены со входами преобразователя код - напряжение, а входы - с выходами вторых элементов ИЛИ, вторые входы которых подключены к выходу первого элемента ИЛИ, причем выход управляемого генератора является выходом блока задания скорости.
Источники информации,
принятые во внимапие при эксиертнзе
1.Авторское свидетельство СССР ЛЬ 302729, кл. G 06G 7.30, 1970.
2.Иатент Великобритании № 1303737, кл. G 3N, 1973.
3. Агурский М. С. и др. Числовое программное управленне станками. М., «Маиппюстроенне, 1966, стр. 178-179.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Цифровой линейный интерполятор | 1987 |
|
SU1434406A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1675849A1 |
| Устройство контроля для систем программного управления | 1990 |
|
SU1775716A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Линейный интерполятор | 1986 |
|
SU1383302A1 |
| Линейный интерполятор | 1988 |
|
SU1522157A1 |
