1
Изобретение относится к автоматизации процесса вакуумирования стали в вакуумных установка порционного типа в сталеплавильном производстве.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство, состоящее из зубчатой рейки, устанавливаемой на корпусе вакуумкамеры и находящейся в зацеплении с зубчатым колесом, которое кинемати чески связано с потенциометром.
Данное устройство не дает возможности получить информацию о скорости перемещения, амплитуде .качания и числе ходов ваку« ум-камеры. Кроме того, в известном устройстве используется в качестве датчика ненадежный в условиях металлургического производства потенциометр, что не обеспечивает в целом его работоспособности.
Цель изобретения - автоматический конт роль скорости перемещения, амплитуды качания и числа ходов вакуум-камеры.
Это достигается тем, что в известное устройство, содержащее прикрепленную к корпусу вакуум-камеры зубчатую рейку,
находящуюся в зацеплении с зубчатым колесом, установлен редуктор с двумя выходными валами, входной вал которого соединен с зубчатым колесом. Один выходной вал и кинематически связанный с ним тахометрический датчик, который соединен с самопишущим прибором, образуют узел контроля скорости движения вакуум-камеры. Другой выходной вал связан с сельсин-датчиком, который электрически соединен с сельсин-приемником, служащим для задания амплитуды качания вакуум-камеры и обеспечивающим подачу импульсов в схему счета числа ходов вакуум-камеры.
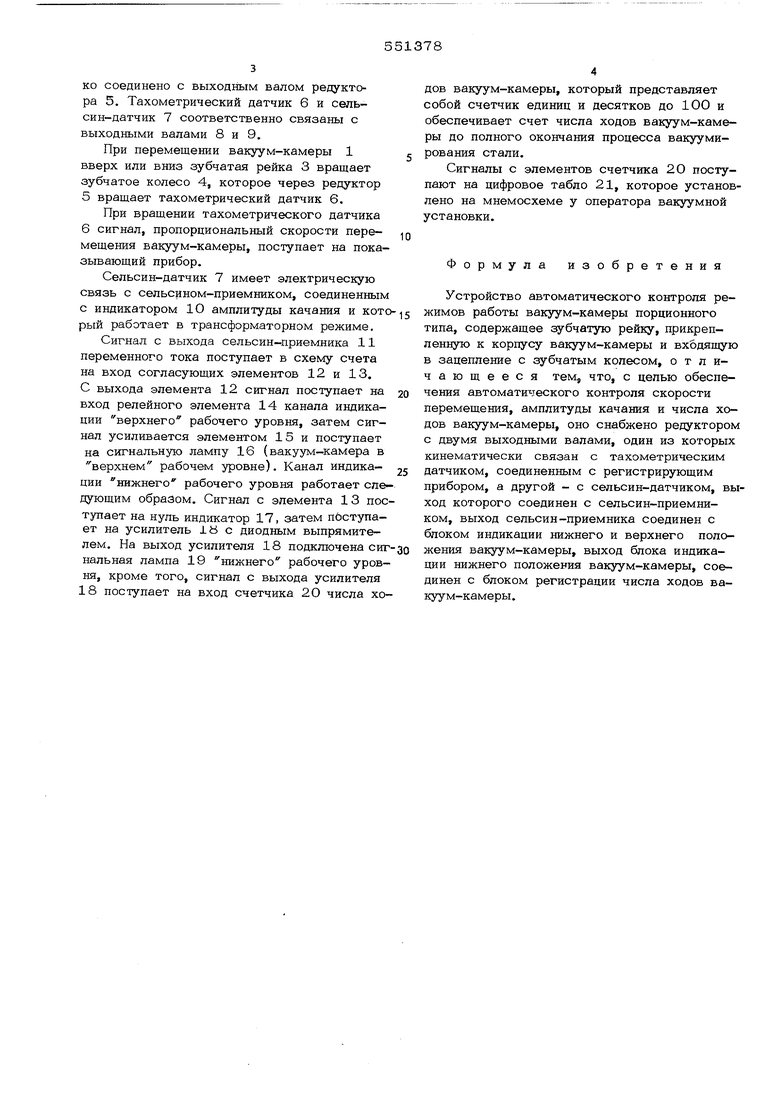
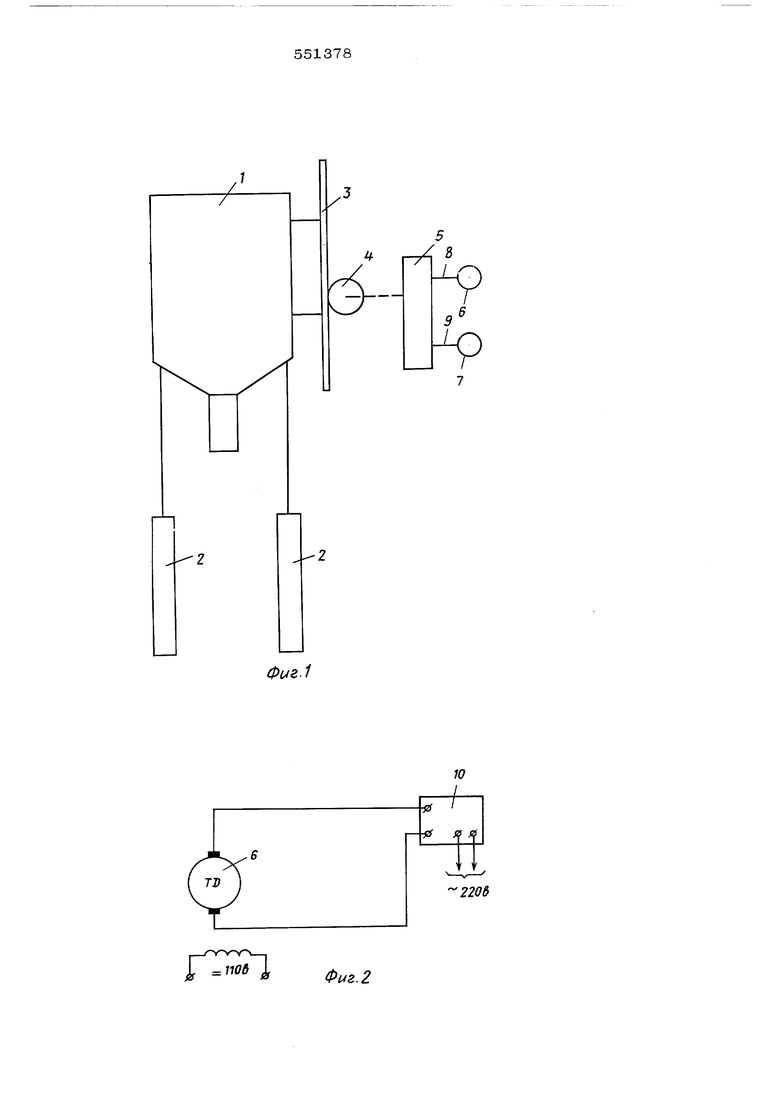
На фиг. 1 изображена упрощенная кинематическая схема устройства; на фиг. 2 и 3 - электрическая схема узла контроля амплитуды качания и числа хода вакуумкамеры; на фиг. 4 - схема счета числа ходов вакзгум-камеры.
Вакуум-камера 1 снабжена гидроцилиндрами 2 для перемещения и имеет прикрепленную к ее корпусу зубчатую рейку 3, которая находится в зацеплении с зубчатым колесом 4. Зубчатое колесо 4 жест-
ко соединено с выходным валом редуктора 5. Тахометрический датчик 6 и сельсин-датчик 7 соответственно связаны с выходными валами 8 и 9.
При перемещении вакуум-камеры 1
вверх или вниз зубчатая рейка 3 вращает зубчатое колесо 4, которое через редуктор
5вращает тахометрический датчик 6.
При вращении тахометрического датчика
6сигнал, пропорциональный скорости перемещения вакуум-камеры, поступает на показывающий прибор.
Сельсин-датчик 7 имеет электрическую связь с сельсином-приемником, соединенным с индикатором 10 амплитуды качания и кото рый работает в трансформаторном режиме. Сигнал с выхода сельсин-приемника 11 переменного тока поступает в схему счета на вход согласующих элементов 12 и 13. С выхода элемента 12 сигнал поступает на вход релейного элемента 14 канала индикации верхнего рабочего уровня, затем сигнал усиливается элементом 15 и поступает на сигнальную лампу 16 (вакуум-камера в верхнем рабочем уровне). Канал индикации нижнего рабочего уровня работает следующим образом. Сигнал с элемента 13 поступает на нуль индикатор 17, затем пбступает на усилитель 1в с диодным выпрямителем. Па выход усилителя 18 подключена сиг нальная лампа 19 нижнего рабочего уровня, кроме того, сигнал с выхода усилителя 18 поступает на вход счетчика 20 числа ходов вакуум-камеры, который представляет собой счетчик единиц и десятков до 100 и обеспечивает счет числа ходов вакуум-камеры до полного окончания процесса вакуумирования стали.
Сигналы с элементов счетчика 20 поступают на цифровое табло 21, которое установлено на мнемосхеме у оператора вакуумной установки.
Формула изобретения
Устройство автоматического контроля режимов работы вакуум-камеры порционного типа, содержащее зубчатую рейку, прикрепленную к корпусу вакуум-камеры и входящую в зацепление с зубчатым колесом, отличающееся тем, что, с целью обеспечения автоматического контроля скорости перемещения, амплитуды качания и числа ходов вакуум-камеры, оно снабжено редуктором с двумя выходными валами, один из которых кинематически связан с тахометрическим датчиком, соединенным с регистрирующим прибором, а другой - с сельсин-датчиком, выход которого соединен с сельсин-приемником, выход сельсин-приемника соединен с блоком индикации нижнего и верхнего положения вакуум-камеры, выход блока индикации нижнего положения вакуум-камеры, соединен с блоком регистрации числа ходов вакуум-камеры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Качающийся питатель | 1981 |
|
SU1008108A1 |
| Вакууматор | 1981 |
|
SU1020443A1 |
| Подъемно-транспортная машина вакууматора | 1978 |
|
SU742467A1 |
| Стенд для испытаний подвижных элементов конструкций | 1983 |
|
SU1161835A1 |
| Устройство для измерения перемещений | 1986 |
|
SU1373531A1 |
| Летучие ножницы | 1987 |
|
SU1461589A1 |
| СТАНОК-КАЧАЛКА | 2012 |
|
RU2506457C1 |
| Устройство автоматического контроля режимов работы порционного вакууматора | 1987 |
|
SU1482957A1 |
| Система управления режимом порционного вакуумирования стали | 1983 |
|
SU1101455A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МЕХАНИЗМОМ ШАГАНИЯ ЭКСКАВАТОРА | 1969 |
|
SU255135A1 |

Фиг.1
2206
Г
Фиг.2 г-0--нов
in
в схему индикации 121
11
От
Фиг.З
J5
16
-в
Г
1
