Изобретение относится к устройст вам для измерения параметров электрических машин, а именно к устройст вам, предназначенным для определения электромагнитной постоянной вре мени Tj якорных цепей электродвигателя постоянного тока независимого возбуждения. Точное значение Т необходимо знать при расчетах и налад ке промышленных систем регулирования с целью достижения этими системами оптимальных режимов функционирования , Известно устройство для измерения электромагнитной постоянной вре мени якорной цепи электродвигателя, содержащее индуктивную обмотку,датчик тока якоря, блок вычитания,блок интегрирования 1. При определении Тд этим устройством необходимо проинтегрировать разность между сигналом, пропорциональным току яко ря Однако устройство обладает: м определения лой точностью из-за включения в электромагнитную цепь дополнительных активных сопротивлений, а также за счет того, что индуктивное сопротивление якорной цепи зависит от тока возбуждения; определение Т происходит при снятом токе возбуждения, следовательно, на 20-40% измеренная Тэ отличается от истинной Тз (истинная Т-эХарактеризует переходные процессы в машине с подключенной обмоткой возбуждения) . Область, применения устройства ограничена, так как в большинстве случаев нет возможности определить Тд, если наблюдается режим прерывистых токов. Вероятно появление аварийных режимов.Двигатель при малом статическом моменте может за счет остаточного маг1штного потока при номинальном токе ПОЙТИ в разнос (при определении электромагнитной постоянной времени на заторможенном двигателе ток обычно изменяют от нуля до номинального) . Известное устройство для опредепения Т реализует интегральный метод определения Т 2. За счет включения порогового блока удалось увеличить точность в определении Тэ вне зависимости от величины сопротивлений, включенных последовательно с. индуктивностью инерционного звена, т.е. удалось исключить
только первый недостаток рассмотрег вого выше устройства.
Известно также устройство для измерения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока независимого возбуждения, содержащее датчики напряжения тока и ЭДС якорной Цепи, подключенные к трем вxoдiaм йаоитабирующего бтюка, выход которого через два последовательно соединенных ключа связан со входом сумматора - интегратора, управляюшие входы ключей соединены с выходами первого и второго релейных блоков,перфые входы которых через соответст ующие резисторы соединены с выходо {Затчика тока якорной цепи,а к други ЬходаМ релейных блоков подключены Щеточники опорного напряжения 3. Это устройство позволяет определять Электромагнитную постоянную времени якорной цепи на вращающей ма1аине Согласно этому устройству необходимо проинтегрировать на рабочем участке разность между сигналом,пропорциональным напряжению, подавае-. мому на якорь двигателя, и между сигналами, пропорциональными оборотам {ЭДС Е) и току 1 двигателя,
В зтом устройстве сигнал, пропорциональный оборотам (ЭДС), берется е выхода тахогенератора, что ограничивает область применения данного устройства только двигателями, валы которых соединены с тахогенера орами.
Цель изобретения - расширение области применения.
; Цель достигается тем, что в устройство введен дополнительный источник опорного напряжения, а датчик ЭДС выполнен в виде интегратора, один из входов которого соединен с выходом датчика тока, а второй вход - с выходом дополнительного источника опорного напряжения.
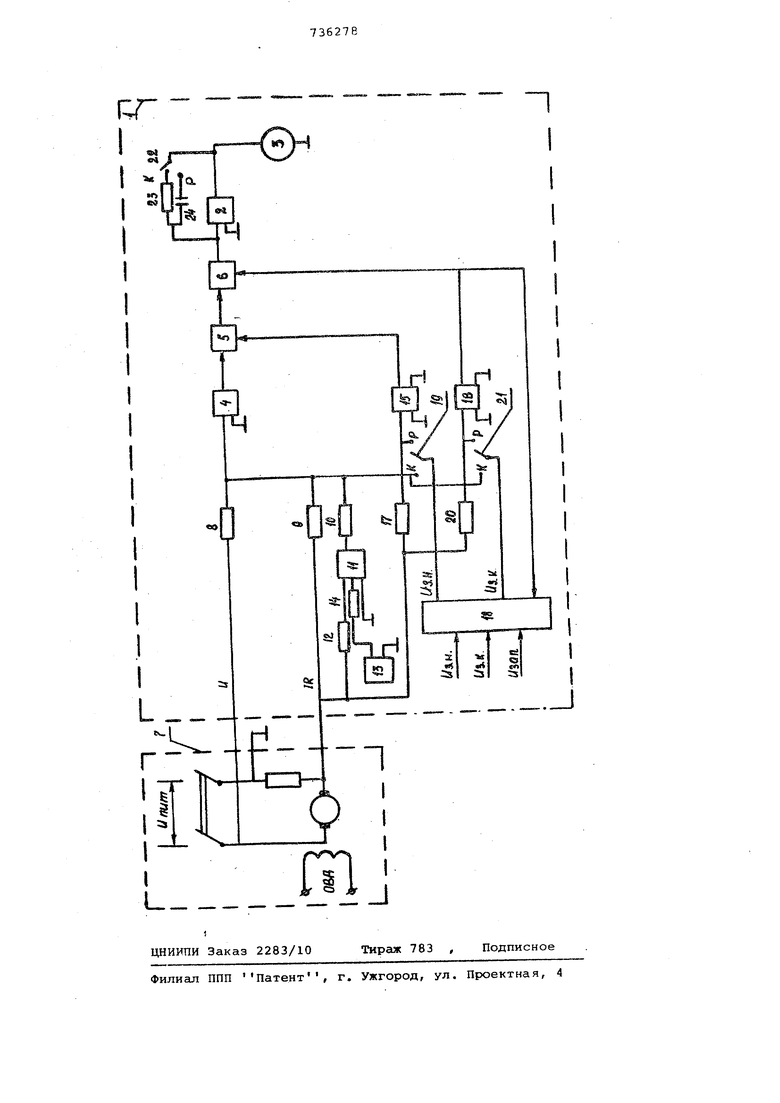
На чертеже показана функцион;альная схема устройства.
Устройство 1 содержит интегратор-сумматор 2, к выходу которого подключен измерительный прибор 3. Вход интегратора-сумматора 2 подключен к выходу масштабного блока 4 через последовательно соединенные замыкающий 5 и размыкающий б ключи. Масштабный блок 4 имеет три входа. Один вход (с датчика напряжения якорной цепи и ) подсоединен к вхо,цу исследуемого звена 7 (за вход принимаем напряжения, подаваекие на якОрь двигателя) через резистор 8.
Второй вход (входГЯ) масштабного блока подсоединен к выходу исследуемого звена по току через резистор 9 (датчик тока). За выход исследуемого звена по току принято падение напряжения на добавочном сопротивлении якорной цепи. Третий
вход (выход ЭДС Е) подсоединен через резистор 10 к выходу интегратора 11, один вход которого подсоединен к выходу исследуемого звена по току (выход IR) через резистор 12, а второй - к источнику 13 дополнительного опорного постоянного напряжения через резистор 14. Управляющий вход замыкающего ключа 5 подсоединен к релейному блоку 15, а управляющий вход размыксиощего ключа 6 подсоединен к релейному блоку 16. Релейный блок 15 имеет два входа: один вход релейного блока подсоединен к выходу исследуемого звена по току (вход,) через резистор 17, а второй вход - к управляющему блоку 18 через переключатель 19, два положения: положение Р .соответствует работе, положение К - калибровке. Величина постоянного напряжения от управляющего блока 18 определяет срабатывание релейного блока 15, Релейный блок 16 также имеет два входа: один вход релейного блока подсоединен к выходу исследуемого звена по току (вход 1R ) через резистор 20, а второй - к управляющему устройству 18 через переключатель 21, который, как и переключатель 19, имеет два папоженкя: положение Р соответствует работе,положение К - калибро.вке. Кроме того, устройство имеет переключатель 22, который также имеет два положения: положение К - калибровка, положение Р - работа, В положении К интегратор-сумматор 2 работает в режиме сумматора (резистор 2-3) , в положении Р - в режиме интегратора (емкость 24).
Работа устройства подразделяется на три режима. Первый .режим-компенсация холостого хода двигателя производится интегратором 11. В этом режиме источником 13 постоянного напряжения на вход интегратора 11 подается сигнал, равный по величине, но противоположный по знаку сигналу холостого хода. Интегратор 11 останавливается,
Второй режим - калибровка, В этом режиме устанавливаются коэффициенты передачи масштабного блока 4 по входам и,1R, Е. Ошибка в определении коэффициентов приводит к ошибке в определении электромагнитНой постоянной времени якорных цепей двигателя. Процесс калибровки включает в себя не только выставление коэффициентов, но и их проверку При выставлении коэффициентов двигатель работает на установившейся скорости, интегратор-сумматор 2 работает в режиме суммирования, а переключатели 19, 21 и 22 переведены в положение калибровка (обратная связь интегратора-сумматора 2 состоит из резистора 23). В этом ре«име размыкающий ключ б замкнут и на интегратор-сумматор 2 от масштабного 57шка 4 подается напряжение. Затем отключается питание йви и производится сброс напряжения интегратора 11. После этих операций подается питание на иссле дуемое звено 7 (двигатель разгоняется) и интегратором-сумматором 11 интегрируется с запоминанием сигна V у.% (Л динамическая состав ляющая тока, 1 - ток холостого хода). При этом на вход сумматора 4 подаются три сигнала: сигнал, пр порциональный напряжению питания двигателя (вход U ) , сигнал пропорциональный току (вход1К ) и сигнал пропорциональный ЭДС (вход Е; . Про интегрированное значение динамичес кого тока определяет ЭДС двигателя Это, -можно показать, если записать уравнение моментов: Go с Ф fi -1 N а згТ at м g inxii J маховой момент двигателя, где ЭТ5 n t Ф скорость вращения, время поток. Cj - коэффициент пропорциональности. Проинтегировав выражение (1), по лучаем 75С СО Т ,.) .О,)Умножим первую и правую часть выражения ( 2) на , получим 575с ФС Ф 7° -. ., где СЕ - коэффициент пропорциональности. Теперь когда есть три сигнала и,1( и Е, осуществляем их масштаби рование. Масштабирование сигнала О осуществляется изменением коэффициента передачи масштабного блока 4 (резистор 8) до тех пор, пока стрелка показывающего прибора 3 не отклонится на всю шкалу. Затем резистором 10 изменяется коэффициент Масштабного блока 4 по входу Е (вхо Е противоположен по.знаку входу U) и необходимо добиться того, чтобы стрелка показывающего прибора 3 от клонилась на несколько делений (поч ти верлулась в нулевое положение). Точное значение Е на данном этапе знать не надо: оно будет точно определено при дальнейшей калибровке Предварительно можно сказать, что зависимости от типа и мощности дви гателя сигнал Е составляет 85-99% от сигнала U, После этого резистором,9 выстав ляется коэффициент передачи масгота ного блока 4 по входуШ : изменяются коэффициенты передачи этого блока и добиваемся нулевого показания прибора 3. Теперь приступаем к выбору начала рабочего участка. Рабочий участок выбирается по величине сигHaJiatR, В установившемся режиме определяется ток холостого хода сигнала 1 ft , выраженный в делениях показывающего прибора 3. Так как начаЛьный участок измерения Т определяется, рабочим током двигателя, то можно, исходя из пропорциональности между сигналом холостого хода и показаниями прибора 3, определить начало рабочего участка. Для удобства калибровки целесообразно равенство, между входными сопротивлениями блоков 4, 15 и 16 по сигналу1Й . Если, например, начало рабочего участка соответствует десятикрат-. г1ому значению тока холосггого хода, то, изменяя напряжение задания Uj.H , следует отклонить стрелку показывающего прибора на число делений в 10 раз превышающее число делений от сигнала тока холостого хода. Конец рабочего участка определяется по той же методике, что и начало рабочего участка. Только конец рабочего участка определяется вели :Иной и напряжением задания и,,ц . После выполнения всех операций прибор считается предварительно откалиброванным. Затем уточняют калибровку, т.е. уточняют коэффициенты передачи блока 4 по входам О,IR и Е. Для этого |1ереключатели 19, 21 и 22 переводятся в положение Р - работа . Интегратор-сумматор 2 переводят в режим интегратора (в цепь обратной связи интегратора-сумматора включают конденсатор 24), Двигатель обесточивается, а после его полной ос- тановки на его якорь вновь подают растущее по произвольному закону до установившегося значения напряжения. Причем установившееся значение этого напряжения должно равняться нап эяжению, подаваемому на двигатель в режиме калибровка. После подачи напряжения на двигатель возрастают выходные сигналы 1ft и Е. Когда 1R достигает величи- . ны напряжения задания начала рабочего участка из,.н, на выходе релейного блока 15 появляется сигнал на срабатывание замыкающего ключа 5. Этот ключ срабатывает и интеграторсумматор 2 начинает интегрировать напряжение с выхода масштабного блока 4. При Дсшьнейшем росте сигнал 1 достигает величину сигнала и.к и на выходе релейного блока 16 появляется сигнал на срабатывание размыкающего ключа 6, Этот ключ срабатывает и отключает вход интегратора-сумматора 2 от масштабного блока 4
Интегратор-сумматор 2 перестает интегрировать без сброса результата интегрирования, а результат интегрирования показывает измерит1эль ный прибор 3. Если коэффициенты масштабного блока 4 выбраны прааильМО, то показания измерительного прибора 3 соответствуют Т,, так как Т определяется по следующей формуле
Т .
(4)
К-,
коэффициенты переК
где
-1 дачи устройства по соответствующим входам,
1|иК соответствуют наЧпряжениям J.K, ии.н..
Однако значение Тд может отличать-, ся от истинного за счет ошибок в коэффициентах передачи масштабного фгока 4. Поэтому полученное значение Т нуждается в проверке. Проверка осуществляется автоматически и достигается тем, что Т определяется t-на участке подъема и на участке спада динамического тока. На Э:том участке производная тока меняе;т знак и меняет знак функция на, входе интегратора-сумматора 2. Ввиду того, что участок задания определения Тд не изменился, то при п:равильно выбранных значениях коэффициентов передачи масштабного блок:а 4 измерительный прибор 3 должен показать ноль. Если измерительный прибор 3 не показал ноль, то коэффициенты по входам Е иШ выставлены с ошибками. Учитывая величину и знак отклонения стрелки показывающего прибора 3 при запуске двигателя и учитывая, что в установившемся режиме выполняется равеноство
,
следует уточнить коэффициенты масштабного блока 4 о За три - семь пробных запусков двигателя удается выставить коэффициенты по входам IR и Е. При правильно выбранных коэффициентах передачи масштабного блока 4 измерительный прибор 3 покажет ноль,
следующий режим - работа. Переключатель 19, 21 и 22 остается в положении Р (сумматор-интегратор 2 работает в режиме интегрирования) На вход управляющего устройства 18 подается напряжение ,. Это напряжение запрещает интегрировать сигнал с выхода маси табного блока 4 на спадающей ветви динамического тока Таким образом, если на управляющее
устройство 18 подается два сигнала: . и сигнал с выхода релейного блока 16, то такая комбинация сигналов запрещает повторное включение разь«дкающего ключа 6 на участке спадания динамического тока. Следовательно, устройство работает так же, как и в режиме калибровки, но так как нет повторного интегрирования, то показания прибора пропорциональны электромагнитной постоянной вр--мени,
В обшем случае для определения Тд нужно осумествить onepaui-m деления, согласно выражению (4), Однако в частном случае, когда жестко задана разность 1,,--1ц, деление может быть учтено изменением коэффициента передачи измерительного блока 3,
Устройство позволяет определить Т- быстро и с большой точностью, что снижает затраты времени на наладку систем автоматического регулирования и повышает качество наладочных работ, Устройство может быть использовано на электродвигателях, не содержагцих датчики скорости, что расширяет область применения устройства.
Форгтула изобретения
Устройство для измерения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока независимого возбуждения, содержащее датчики напряжения, тока и ЭДС якорной цепи, подключенные к трем входам масиггабируюаюго блока,- выход которого через два последовательно соединенных ключа связан со входом сумматора-Иитегратора, управляющие входы клгсчей соединены с выходами первого и второго р(2лейных блоков J первые входы которых через соответствуюшие резисторы соединены с выходом датчика тока якорной цепи, а к другим входам релейных блоков подключены источники опорного напряжения, о г л и ч а ю ид е е с я тем, чтО; с целью расширения области применения введен дополнительный источник опорного напряжения, а датчик ЭДС выполнен в виде интегратора, один из аходов ко7сорого соединен с выходом датчика тока, а второй вход - с выходом дополнительного источника опорного напряжения.
Источники информации, принятые во внимание при экспертизе
1.Борцов Ю,Л, и др. Экспериментальное определение параметров автоматизированных электроприводов, М., Энергия , 1969.
2.Авторское свидетельство СССР f 467332, кл. С, 05 В 23/04, 1974.
3.Авторское свидетельство СССР по заявке № 2175924/18-21,
кл. Н 02 К 15/00, 1977,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения электромагнитной постоянной времени якорных цепей двигателя | 1979 |
|
SU911476A2 |
| Способ определения электромагнитнной постоянной времени якорной цепи электродвигателя постоянного тока | 1975 |
|
SU608232A1 |
| Устройство для определения электромагнитной постоянной времени якорных цепей двигателя | 1975 |
|
SU661513A1 |
| Способ определения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока | 1985 |
|
SU1307525A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Устройство для автоматической настройки компенсации емкостных токов в кабельных сетях с дугогасящим реактором | 1984 |
|
SU1229898A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1990 |
|
SU1770785A1 |