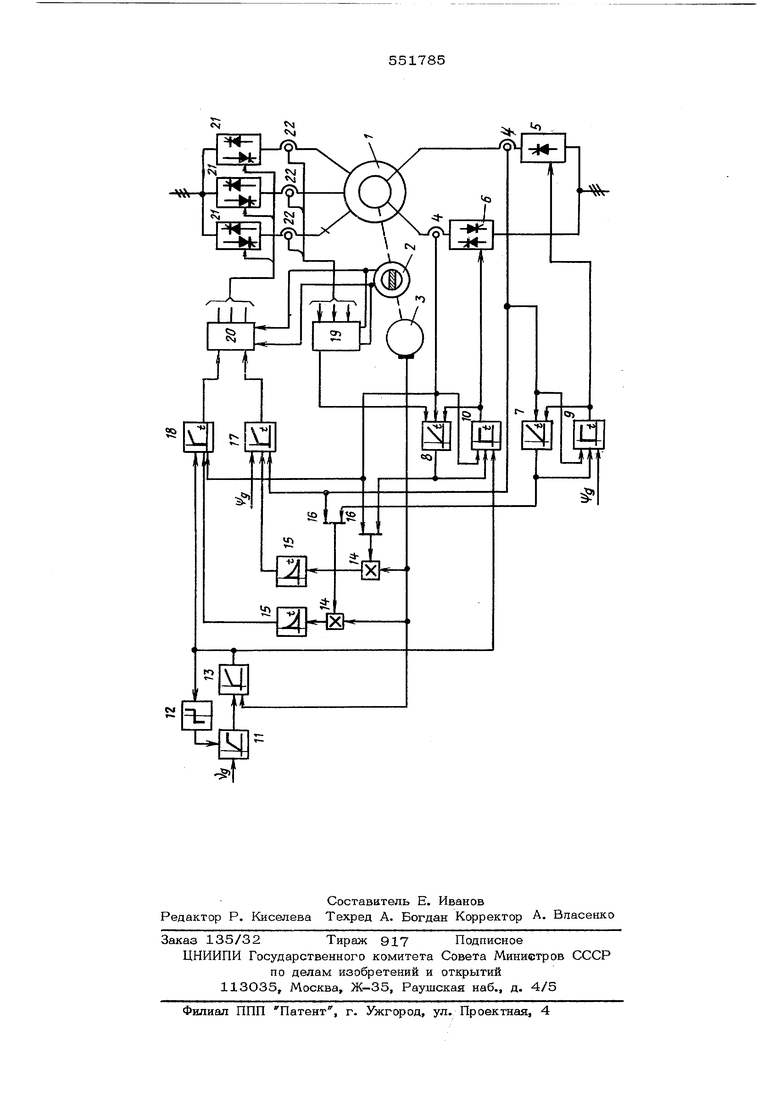
(54) ЭЛЕКТРОПРИВОД С СИНХРОННЫМ аВИГАТЕЛЕМ лятпра к датчика продольного тока ротора зходы измерителя поперечного потокосцепления ротора подключены к выходу попере кого тока статора блока обратного преобр зования, к выходам регулятора и датчика поперечного тока ротора, при этом входы регуляторов продольного и поперечного то ков статора подключены соответственно к датчикам одноименных токов ротора. На чертегке изображена блок-схема предлагаемого устройства. Устройство содержит: синхронный двига тель 1 с продольной и поперечной обмотка ми ротора, датчик углового положения 2, датчик скорости 3, датчики 4 токов ротора, источник питания 5 продапьной обмотки ротора cf , источник питания 6 попереч ной обмотки ротарр f измерители 7 и 8 п токосаеппзний обмот-ок ротора, регуляторы продольного Э и поперечного 10 токов ротора, задатчик интенсивности 11, нелинейный элемент 12, регулятор скорости 13, множительные элементы 14, элементы 15 гибкой связи {RC-цепи), форми рователи 16 продольного и поперечного пото косцепления статора, регуляторы продольного 17 и поперечного 18 токов статора, блоки прямого 19 и. .обратного 20 преобразований, источники 21 питания статор датчики 22 токов статора. Электропривод работает следующим образом. Сигнал задания (J скорости нагрузки поступает на вход задатчика интенсивности 11 и далее на вход регулятора скорости 13, на другой вход которого поступает сигнал обратной связи с датчика скорости 3. Сигнал с выхода регулятора 13 вмес- те с сигналом Vg- образует сигналы задания для регуляторов 9, 10 и 17, 18 токов ротора и статора. Сигналы с выходов регуляторов 9 и 10 воздействуют на источники питания 5 и 6, которые питают обмотки ротора продоль ными и поперечными токами. Сигналы с датчиков 4 токов ротора поступают на входы регуляторов 9 и 10 токов ротора, на входы которых поступают также сигналы продольного и поперечного потокпоцеплений ротора с выходов измери тепей 7 и 8 . На входы измеритепей 7 и 8 посту пают сигналы продольного и поперечного токо ротора от датчиков 4, а также сигнапы с выходоврегуляторов 9и 1О. Измерители 7 и 8 потокосцеплений ротора выполнены в виде интеграторов, которые интегрируют напряжения, наводимые потокосцеплениями обмоток ротора. Формирование указанных напряжений обеспечивается за счет связей входов измерителей 7 и 8 с выходами блоков 4, 9 и 10. Из-за неидеальности реальных измерителей 7 и 8 определение потокосцеплений роторов может вестись со значительными погрешностями. Для исключения этого измерителя выполняются охваченными слабой жесткой отрицательной обратной связью и на их входы поступают сигналы с выходов блока обратного преобразования 19. Сигналы на выходах этого блока формируются с помощью датчика углового положения 2. Сигналы с выходов измерителей 7 и 8 используются в качестве сигналов обратной связи на входах регуляторов 9 и 10, а также для получения потокосцеплений статора в формирователях 16, на входы которых, кроме указанных сигналов, поступают сигналы с датчиков токов 4. Сигналы с выходов формирователей 16 с помощью узлов 14 и 15 преобразуются в сигналы компенсации влияния внутренних связей по ЭДС вращения как в извест ных приводах. На входы обратной связи регуляторов 17 и 18 поступают сигналы с датчиков тока ротора, благодаря чему изменение токов ротора приводит к изменению токов статора. В свою очередь, изменение токов ротора происходит при. изменениях потокосцеплений обмоток ротора, которые изменяются при регулировании токов статора. Рассмотрим, каким образом уменьшается влияние погрешностей датчика 2 и блока обратного преобразования 19 на характеристики синхронного привода. В установившемся режиме работы привода сигналы на выходе блока 19 являют ся сигналами постоянного тока. При наличии погрешностей датчика 2 и блока 19 в выходных сигналах блока 19, кроме постоянной составляюцей, содержится пульсирующая составляющая,частота которой определяется скоростью вращения двигателя. При непосредственном использовании сигналов с выхода блока 19 в качестве, например, сигналов обратной связи по току статора характеристики привода оказываются неудовлетворительными из-за наличия периодической составляющей в сигнале обратной связи. В предложенном приводе сигналы блока 19 оказываются профильтрованными с помощью интеграторов измерителей 7 и 8. При значительной постоянной времени измерителей 7 и 8 погрещности датчика 2 будут проявляться практически только при работе привода с нулевой скоростью, причем влияние этих погрешностей будет сказьшаться на величине коэффициента усиления привода по моменту. При этом изменения коэффициента усиления привода по моменту, возникающие из-за norpei ностей реальных датчиков угла, не являют ся существенными для работы привода в режиме упора с нулевой скоростью под нагрузкой. Погрещности датчика 2 влияют на величины фазных напряжений, питающих обмотк статора, однако эти величины оказываются внутри замкнутого контура регулирования токов статора и при соответствующем вы- боре характеристик этих контуров влияние погрешностей датчиков сводится к минимуму. Формирование потокосцеплений статора в блоках 16 ведется практически без влияния погрешностей датчика 2 и, следовательнОу исключается влияние погрешностей датчика 2 на работу привода по каналу компенсации ЭДС вращения. В предлагаемом приводе реализован способ регулирования токов статора, предусматривающий измерение потокосцеплений обмоток ротора, регулирование этих потокосцеплений путем изменения токов ротора и использование результатов измерения токов ротора в качестве сигналов обратной связи и в регуляторах токов статора. Применение этого способа позволило уменьшить влияние погрешности датчика углового положения ротора на характеристики привода. В другом варианте привода датчик углового положения 2 и интегра тор 8 могут быть заменены датчиками Холла, установленными по продольной и поперечной осям синхронного двигателя. Привод согласно изобретению может быть применен в тех случаях, когдг синхронный двигатель работает в услов : вибрации, з даров и применение предизион- ного датчика угла оказывается практичеоки невозможным. Формула изобретения Электропривод с синхронным двигателем содержащий регуляторы продольного и поперечного токов статора и ротора, формирователи продольного и поперечного потокосцеплений статора, блок обратного преобразования с выходами продольного и поперечного токов статора, датчики продольного и поперечного токов и углового положения ротора, отличающийся тем, что, с целью уменьшения влияния погрешностей датчика углового положения и блока обратного преобразования на точность работы электропривода, введены измерители продольного и поперечного потокосцеплений ротора, выход кахсдого из которых подключен к входу формирователя соответственно одноименного (продольного или поперечного) потокосцепления статора и входу регулятора одноименного тока ротора,- а входы каждого из измерителей подключены соответственно к одноименным выходам блока обрат ного преобразования, к выходам регуляторов и датчиков одноименных токов ротора, при этом входы регуляторов продольного и поперечного токов статора подключены соответственно к датчикам одноименных токов ротора. Источники информации, принятые во внимание при экспертизе: 1.Бродовский В. Н., Кузнецов Ю. А. Синхронный тиристорный электропривод с частотно токовым управлением, Электричество, 1969, № 3. 2.Авторское свидетельство rto заявке № 1851400/О7, кл. Н 02 Р 5/34, 30.11.72 г.
«V
f}
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с синхронным двигателем | 1972 |
|
SU518851A1 |
| Регулируемый электропривод с асинхронизированным синхронным двигателем | 1972 |
|
SU490247A1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| Электропривод с синхронным двигателем | 1976 |
|
SU603082A2 |
| Электропривод | 1978 |
|
SU769695A1 |
| Электропривод | 1985 |
|
SU1277346A1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2012 |
|
RU2510877C1 |