нипулятора, выполненная в виде жесткой рамы. На тележке 7 шарнирно смонтирована поворотная рама 8, несущая захват 9. Захват 9 укреплен на штоке 10 телескопического гидроцилиндра 11, который смонтирован на раме 8 с возмол постью поворота вокруг горизонтальной оси на 180°.
Поворот гидроцилиндра 11 с захватом 9 осуществляют гидроцилиидром 12 через передаточный реечно-зубчатый механизм 13.
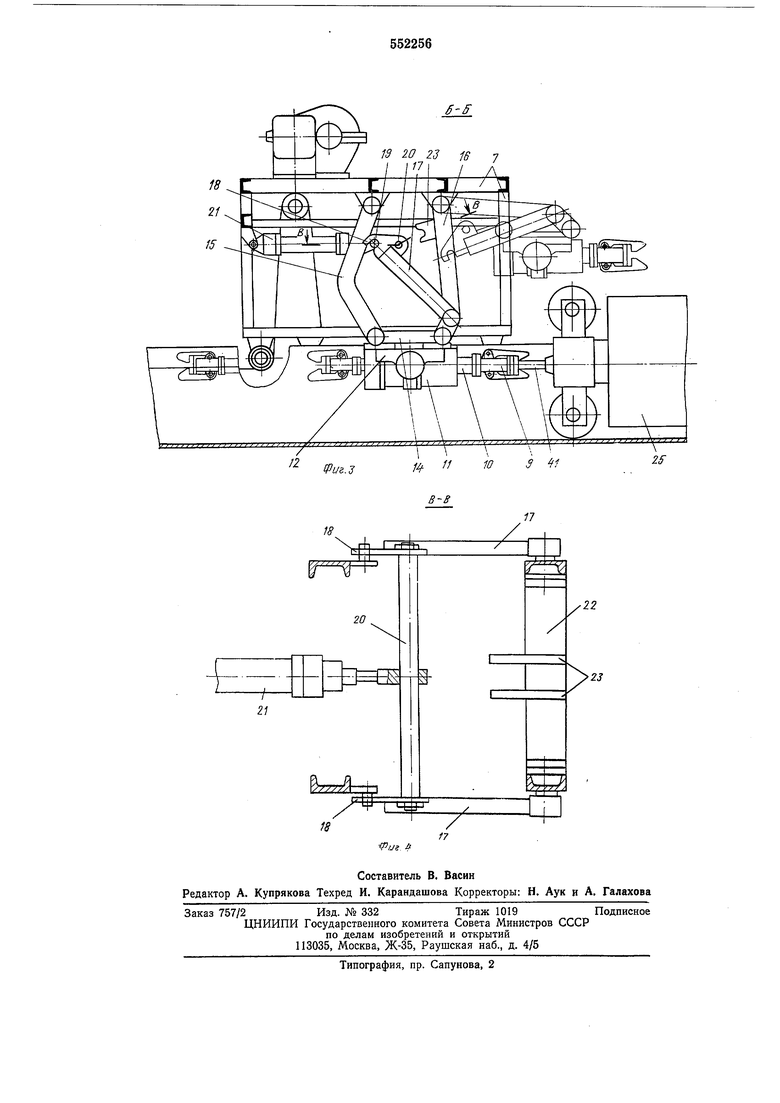
Поворотная рама 8 выполнена в виде двух шарнирных четырехзвенников, у которых рычаги 14, совершающие плоско-параллельное движение, несут гидроцилиндр 12 с захватом 9.
Рычаги 15 и 16 каждого четырехзвенника рамы 8, совершающие качательные движения, связаны между собой запорным рычагом 17. Один конец запорного рычага 17 снабжен защедкой 18, входящей в зацепление с цапфой 19, которая установлена на рычаге 15. Другой конец запорного рычага 17 шарнирно укреплен на рычаге 16. Запорные рычаги 17 соединены между собой стяжкой 20, к которой присоединен шток гидроцилиндра 21, шарнирно смонтированный на тележке 7. Рычаги 16 рамы связаны между собой стяжкой 22, на которой укреплепы кронштейны 23 с пазами для стяжки 20.
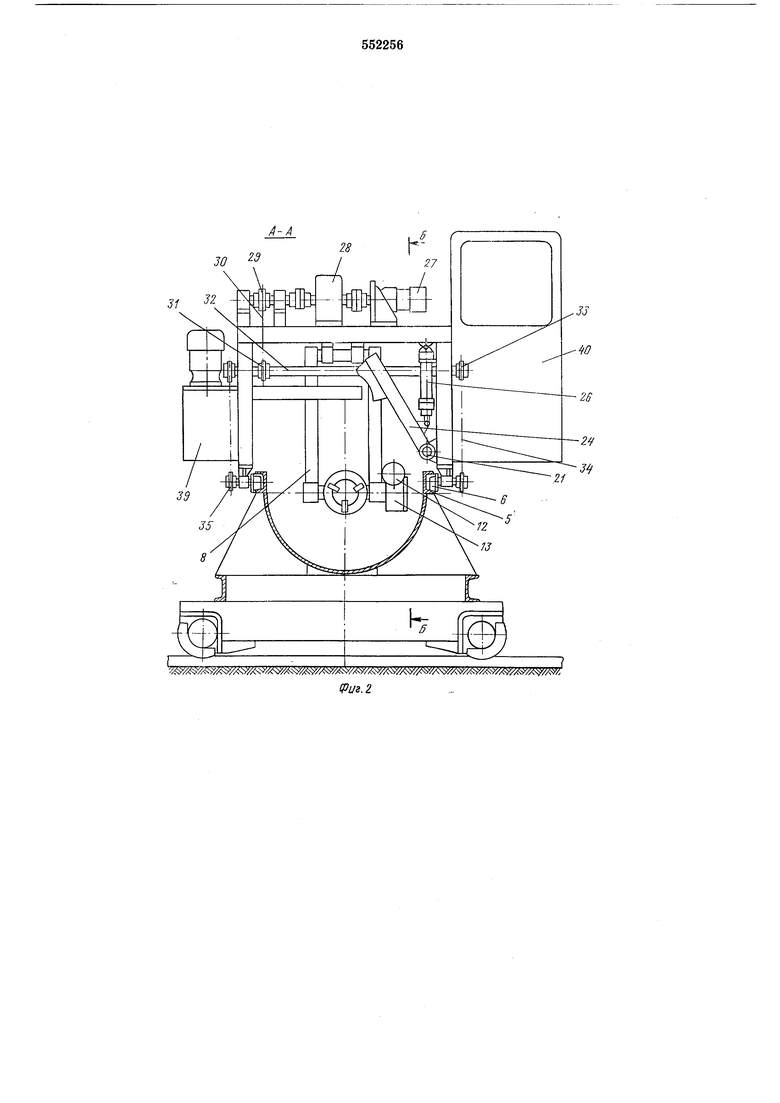
Па тележке 7 шарнирно смонтирована разнт.ящая балка 24, предназначенная для расчленения состава контейнеров 25. Балка 24 шарнирно связана с гидроцилиндром 26, шарнирно закрепленным на тележке 7. Балка 24 выполнена поворотной в плоскости, перпендикулярной к оси желоба 2.
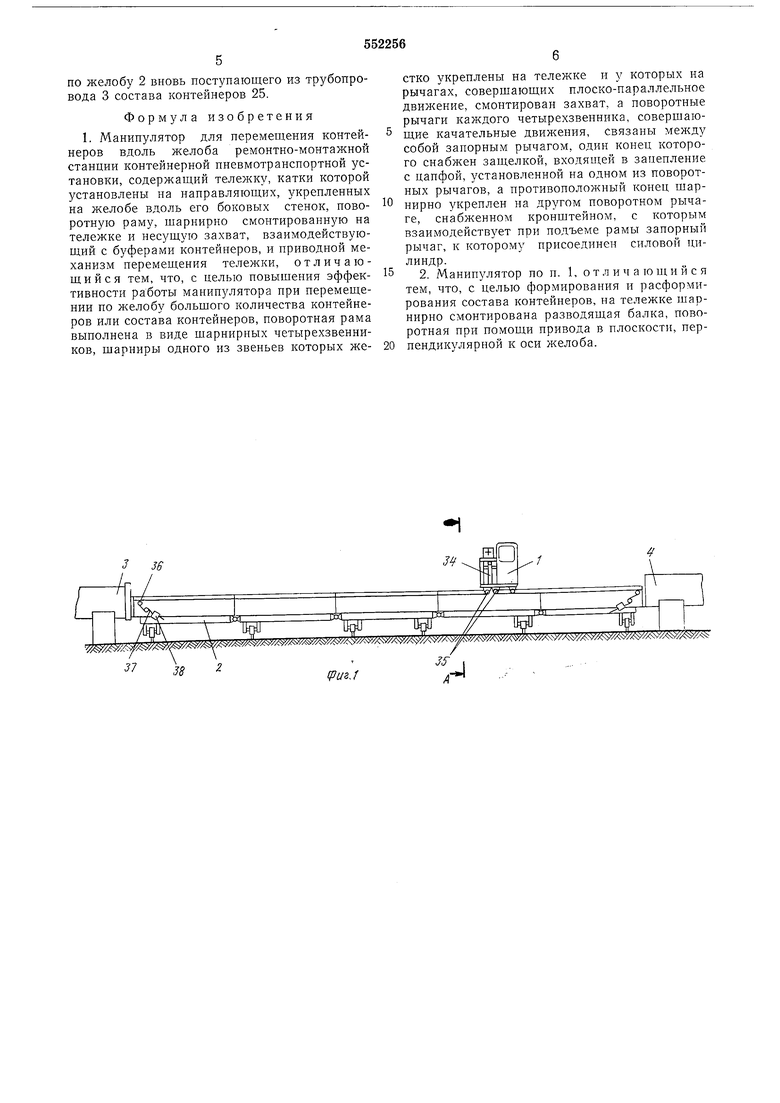
На тележке 7 установлен гидродвигатель 27, связанный через редуктор 28 со звездочкой 29, соединенной приводной цепью 30 со звездочкой 31, установленной на валу 32. На обоих концах вала 32 укреплены звездочки 33, с которыми находятся в зацеплении тяговые цепи 34, расположенные с обеих сторон желоба 2 и огибающие отклоняющие звездочки 35, установленные на тележке 7.
По концам желоба 2 тяговые цепи 34 огибают отклоняющие звездочки 36 и жестко прикреплены своими концами к натяжным винтам 37. Натяжные винты 37 установлены в кронштейнах 38, смонтированных на желебе 2.
На тележке 7 манипулятора с одной стороны установлена насосная станция 39, которая снабжает гидроэнергией гидроцилиндры 11, 12, 21, 26 и гидродвигатель 27, а с другой стороны - кабина 40 оператора, в которой расположены все органы управления.
Описываемый манипулятор работает следующим образом.
Перед началам транспортирования поворотную раму 8 с захватом 9 устанавливают в крайнее положение (на фиг. 3 обозначено пунктиром) для пропуска по желобу 2 состава контейнеров 25 или контейнеров. Для этого рабочую жидкость подают в гидроцилиндр
21, шток которого, выдвигаясь, перемещает запорные рычаги 17, защелки 18 которых в начале движения выходят из зацепления с цапфами 19 рычагов 15. Запорные рычаги 17 перемещаются до упора стяжки 20 в кронштейны 23, после чего начинает поворачиваться вся рама 8, перемещая при этом телескопический гидроцилиндр 11 с захватом 9 в крайнее верхнее положение. После этого состав контейнеров 25 поступает из отводного трубопровода 3 в желоб 2 и движется к глухому участку трубы 4. При входе головной части в глухой участок трубы 4 состав останавливается за счет сжатия перед ним воздуха.
Выход состава контейнеров 25 из глухого участка трубы 4 осуществляют с помощью манипулятора 1. Для перемещения состава контейнеров 25 вдоль желоба 2 при помощи гидроцилиндра 26 опускают разводящую балку 24 между контейнерами. Затем включают гидродвигатель 27, работающий от насосной станции 39, который передает крутящий момент через редуктор 28, звездочки 29 и 31 и приводную цепь 30 на вал 32. Вал 32 вращает звездочки 33, входящие в зацепление с тяговыми цепями 34. Ввиду того, что концы тяговых цепей 34 жестко прикреплены к желобу 2, тележка 7 при вращении звездочек 33 перемещается вдоль желоба 2 по направляющим 5. При этом разводящая балка 24, упираясь и один из контейнеров, передвигает состав контейнеров 25 по желобу 2. Кроме того, при помощи разводящей балки 24 состав контейнеров 25 может быть расчленен на отдельные контейнеры или из отдельных контейнеров может быть сформирован состав.
Для перемещепия состава контейнеров 25 и ввода его в отводной трубопровод 3 поворотную раму 8 с захватом 9 устанавливают в крайнее нижнее положение путем возвращения штока гидроцилиндра 21 в исходное положение. Шток гидроцилиндра 21, втягиваясь в гидроцилиндр при подаче в последний рабочей жидкости, перемещает запорные рычаги 17 до вхождения защелок 18 в зацепление с цапфами 19 рычагов 15. Рама 8 под действием собственного веса при перемещении рычагов 15 возвращается в крайнее нижнее положение. После вхоледения защелок 18 в зацепление с цапфами 19 рама 8 становится жесткой. После этого тележку 7 при помощи гидродвигателя 27 и цепного привода перемещают навстречу составу контейнеров 25. При этом захват 9 встречается с буфером 41 контейнера, сцепляется с ним, и дальнейшее двил еиие телел :ки 7 происходит вместе с контейнерами.
Телескопический гидроцилиндр 11 с захватом 9 может поворачиваться вокруг горизонтальной оси на 180° при помощи гидроцилиндра 12. После окончания ввода состава контейнеров при помощи манипулятора 1 в отводной трубопровод 3 поворотную раму 8 с захватом 9 и разводящую балку 24 устанавливают в крайнее верхнее положение для пропуска
по желобу 2 вновь поступающего из трубопровода 3 состава контейнеров 25.
Формула изобретения
1. Манипулятор для перемещения контейнеров вдоль желоба ремонтно-монтажной станции контейнерной пневмотранспортной установки, содержащий тележку, катки которой установлены на направляющих, укрепленных на желобе вдоль его боковых стенок, поворотную раму, щарнирно смонтированную на тележке и несущую захват, взаимодействующий с буферами контейнеров, и ириводиой механизм перемещения тележки, отличающийся тем, что, с целью повыщения эффективности работы манипзлятора при перемещении по желобу больщого количества контейнеров или состава контейнеров, поворотная рама выполнена в виде щарнирных четырехзвенников, щарниры одного из звеньев которых жестко укреплены на тележке и у которых на рычагах, соверщающих плоско-параллельное движение, смонтирован захват, а поворотные рычаги каждого четырехзвенника, соверщающие качательные движения, связаны между собой запорным рычагом, один конец которого снабжен защелкой, входящей в зацепление с цапфой, установленной на одном из поворотных рычагов, а противоположный конец щарнирно укреплен на другом поворотном рычаге, снабженном кронщтейном, с которым взаимодействует при подъеме рамы запорный рычаг, к которому присоединен силовой цилиндр.
2. Манипулятор по п. 1, от л и ч а ю щи и с я тем, что, с целью формирования и расформирования состава контейнеров, на тележке шарнирно смонтирована разводящая балка, поворотная при номощи привода в плоскости, перпендикулярной к оси желоба.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ И ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078934C1 |
| ТРАНСПОРТНО-УСТАНОВОЧНЫЙ АГРЕГАТ | 2005 |
|
RU2295468C1 |
| Устройство для разгрузки вагонов | 1985 |
|
SU1346548A1 |
| Подвесной манипулятор для протяжки моделей и сборки крупногабаритных форм | 1988 |
|
SU1646673A1 |
| Транспортное средство | 1984 |
|
SU1152821A1 |
| Машина для обрезки сучьев с поваленных деревьев | 1982 |
|
SU1071428A1 |
| Мшина для мойки транспортных средств | 1974 |
|
SU562455A1 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| МАШИНА ДЛЯ РАЗГРУЗКИ СЫПУЧИХ ГРУЗОВ ИЗ ПОЛУВАГОНОВ | 2005 |
|
RU2279396C1 |
| Устройство для перегрузки мусора из контейнеров в мусоровоз | 1982 |
|
SU1071533A1 |
7}§ 2
(puz,l
3S
,-J
PUi. I 13 20 23 18 / 7 Л
