1
Изобретение относится к области приборостроения и может быть использовано в гироскопических устройствах для двухканального преобразователя постоянного тока управления в переменный ток постоянной частоты, пропорциональный квадрату тока управления.
Известны электромеханические преобразователи, содержащие датчики углового положения 1, 2.
Эти преобразователи обеспечивают получение на выходе сигнала, пропорционального поданному току.
Наиболее близким техническим решением к изобретению является преобразователь постоянного тока в переменный, содержащий установленные в общем корпусе реактивный мотор с явновыраженными полюсами и датчик углового положения, например вращающийся трансформатор, вал которого жестко соединен с валом реактивного мотора и валом демпфера{3.
Однако такой преобразователь имеет относительно невысокие точность и надежность.
Цель изобретения - повышение надежности и точности работы преобразователя при воспроизведении квадратичной зависимости, а также расширение области его применения.
Это достигается тем, что функциональный преобразователь содержит упругий элемент, например торсион, один конец которого соединен с валом ротора реактивного мотора, а другой - с корпусом преобразователя.
Реактивный мотор имеет дополнительный ротор, укрепленный внутри общего статора на 5 общем валу с основным ротором со смещением полюсов по углу на ширину полюса статора.
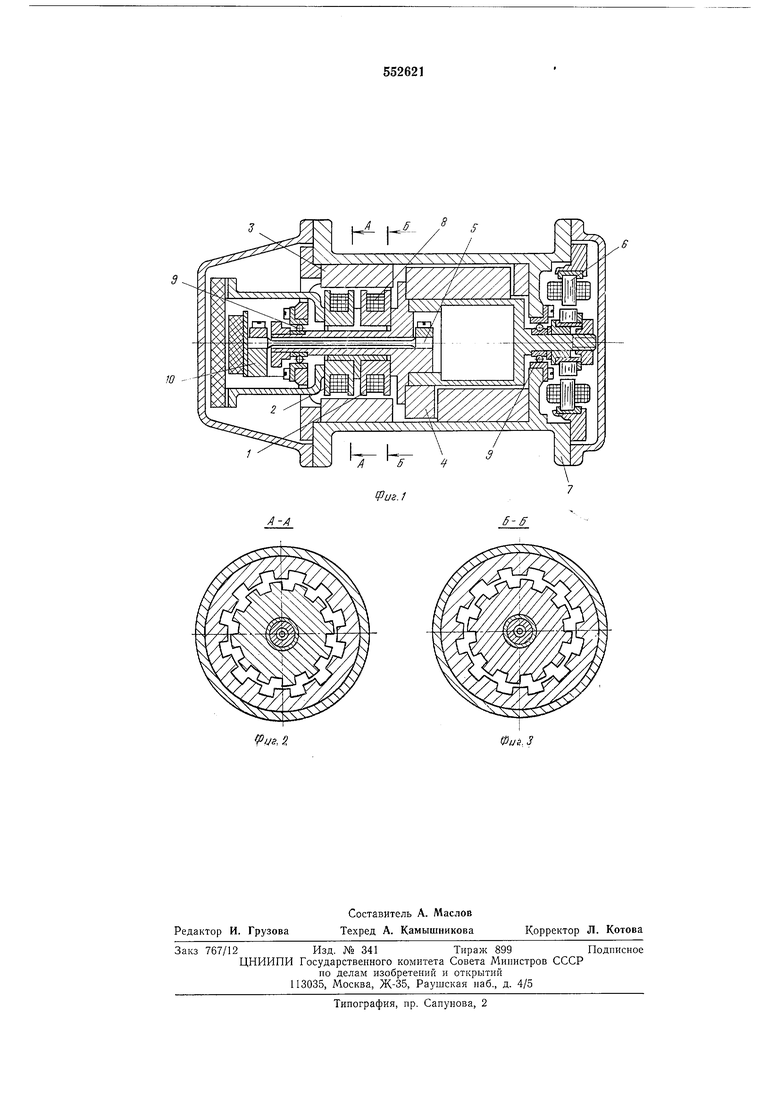
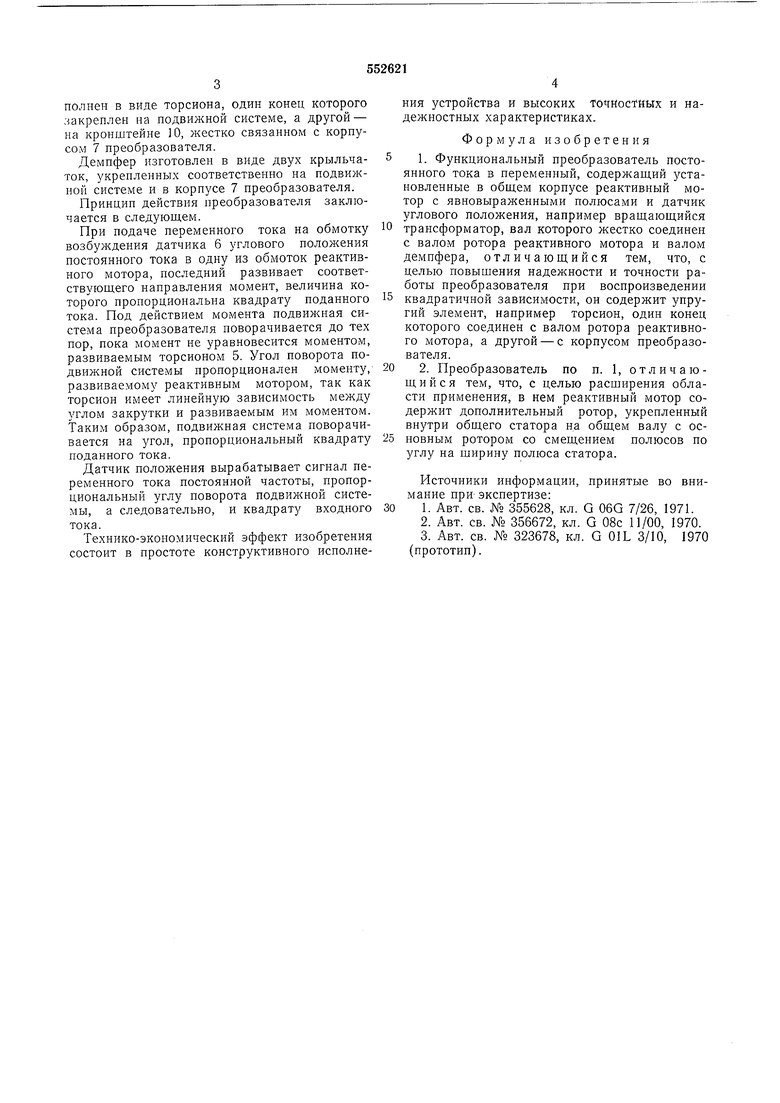
На фиг. 1, 2 и 3 схематически изображен функциональный преобразователь, его разрезы
по А-А и Б-Б.
Преобразователь состоит из реактивного мотора с явновыраженными полюсами на роторах 1 и 2 и статора 3, демпфера 4, торсиона 5 и датчика 6 углового положения.
5 Роторы реактивного мотора л естко закреплены на подвижной системе преобразователя таким образом, что оси полюсов одного ротора 1 смещены относительно осей полюсов другого ротора 2 по углу на ширину полюса
0 статора 3. Реактивный мотор имеет один статор 3, укрепленный на корпусе 7 преобразователя. Обмотки 8 реактивного мотора закреплены на роторах 1 и 2. Подвил ная система установлена в корпусе преобразователя с по5 мощью двух радикальных подшипников 9.
В качестве датчика 6 углового положения применен вращающийся трансформатор, ротор которого жестко закреплен на подвижной системе, а статор - в корпусе 7 преобразова0 теля. Упругий элемент преобразователя выполней в виде торсиона, один конец которого закреплен на подвил ной системе, а другой - на кронштейне 10, жестко связанном с корпусом 7 преобразователя.
Демпфер изготовлен в виде двух крыльчаток, укрепленных соответственно на подвижной системе и в корпусе 7 преобразователя.
Принцип действия преобразователя заключается в следуюпдем.
При подаче переменного тока на обмотку возбуждения датчика 6 углового положения постоянного тока в одну из обмоток реактивного мотора, последний развивает соответствующего направления момент, величина которого пропорциональна квадрату поданного тока. Под действием момента подвижная система преобразователя поворачивается до тех пор, пока момент не уравновесится моментом, развиваемым торсиоиом 5. Угол поворота подвижной системы пропорционален моменту, развиваемому реактивным мотором, так как торсион имеет линейную зависимость между углом закрутки и развиваемым им моментом. Таким образом, подвижная система поворачивается на угол, пропорциональный квадрату поданного тока.
Датчик положения вырабатывает сигнал переменного тока постоянной частоты, пропорциональный углу поворота подвижной системы, а следовательно, и квадрату входного тока.
Технико-экономический эффект изобретения состоит в простоте конструктивного исполнения устройства и высоких точностных и надежностных характеристиках.
Формула изобретения
1. Функциональный преобразователь постоянного тока в переменный, содержащий установленные в общем корпусе реактивный мотор с явновыраженными полюсами и датчик углового положения, например вращающийся
трансформатор, вал которого жестко соединен с валом ротора реактивного мотора и валом демпфера, отличающийся тем, что, с целью повышения надежности и точности работы преобразователя при воспроизведении
квадратичной зависимости, он содержит упругий элемент, например торсион, один конец которого соединен с валом ротора реактивного мотора, а другой - с корпусом преобразователя.
2. Преобразователь по п. 1, отличающийся тем, что, с целью расширения области применения, в нем реактивный мотор содержит дополнительный ротор, укрепленный внутри общего статора на общем валу с осповным ротором со смещением полюсов по углу на ширину полюса статора.
Источники информации, принятые во внимание при экспертизе: 1. Авт. св. № 355628, кл, G 06G 7/26, 1971.
2.Авт. св. № 356672, кл. G 08с 11/00, 1970.
3.Авт. св. № 323678, кл. G OIL 3/10, 1970 (прототип).
Vuz.l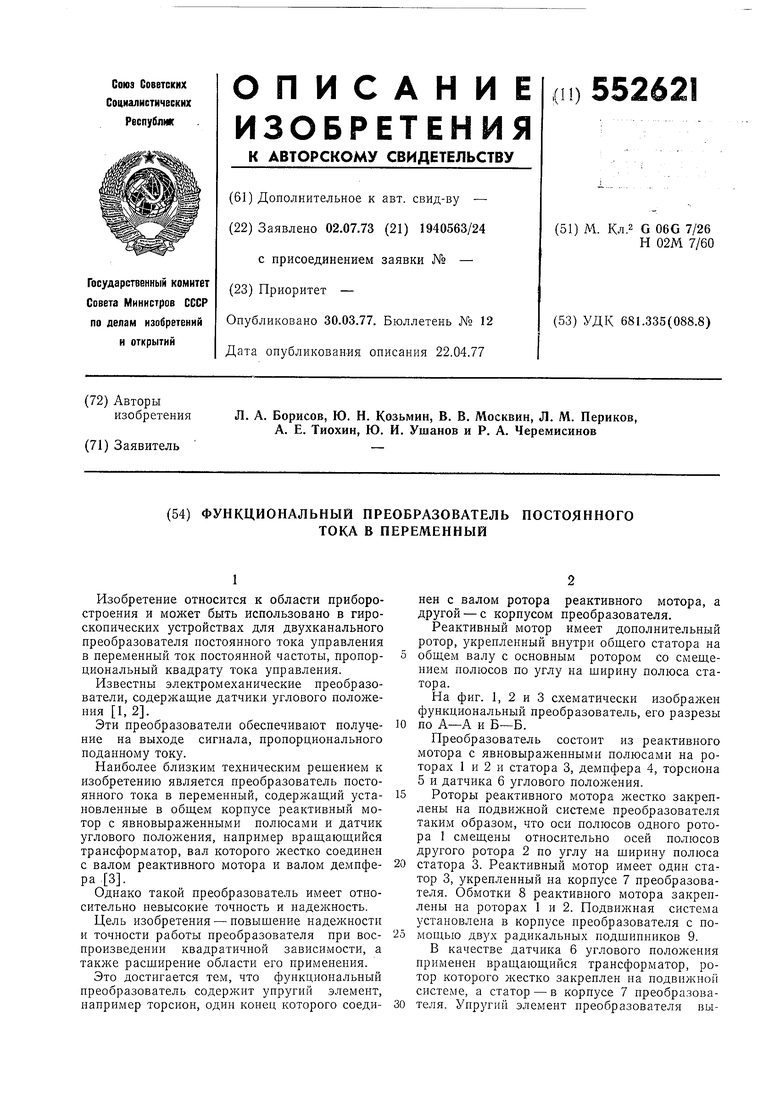
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2001 |
|
RU2181091C1 |
| ЦЕНТРОБЕЖНЫЙ КРИОГЕННЫЙ КОМПРЕССОР | 1992 |
|
RU2034999C1 |
| Датчик линейных ускорений | 1988 |
|
SU1578662A2 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2483416C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2643903C1 |
| Устройство для измерения вращающего момента синхронного электродвигателя | 1983 |
|
SU1139981A1 |
| ГИРОТАХОМЕТР | 2008 |
|
RU2367962C1 |
| Электропривод переменного тока | 1979 |
|
SU828356A1 |