преобразователей линейно изменяющегося сигнала в ступенчатый и в сигналы, близкие к синусоидальным, и трехвходового сумматора с управляющим первым входом, второй вход которого связан с выходом датчика положения и входом преобразователя линейно изменяющегося сигнала в ступенчатый. Выход этого преобразователя подключен к третьему входу сумматора, выход которого соединен с входами преобразователей линейно изменяющегося сигнала в сигналы, близкие к синусоидальным. Эти преобразователи своими выходами подключены к входам усилителей мощности, вырабатывающих напряжения на фазах двигателя.
Такое выполнение устройства позволяет за счет регулирования угла сдвига магнитных осей статора и ротора (угла момента) изменять значение электромагнитного момента двигателя плавно и в щироких пределах при одновременном обеспечении требуемой формы токов в фазах двигателя, близкой к синусоидальной, что позволяет получить высокие энергетические показатели и улучшить качество движения.
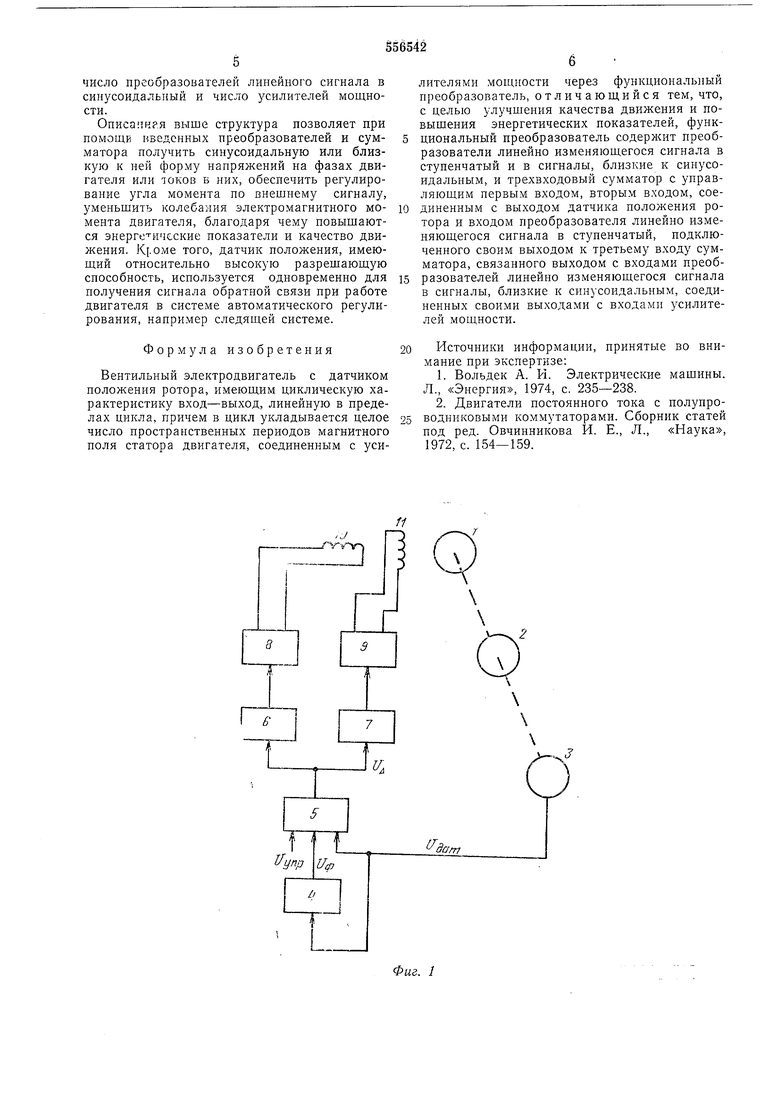
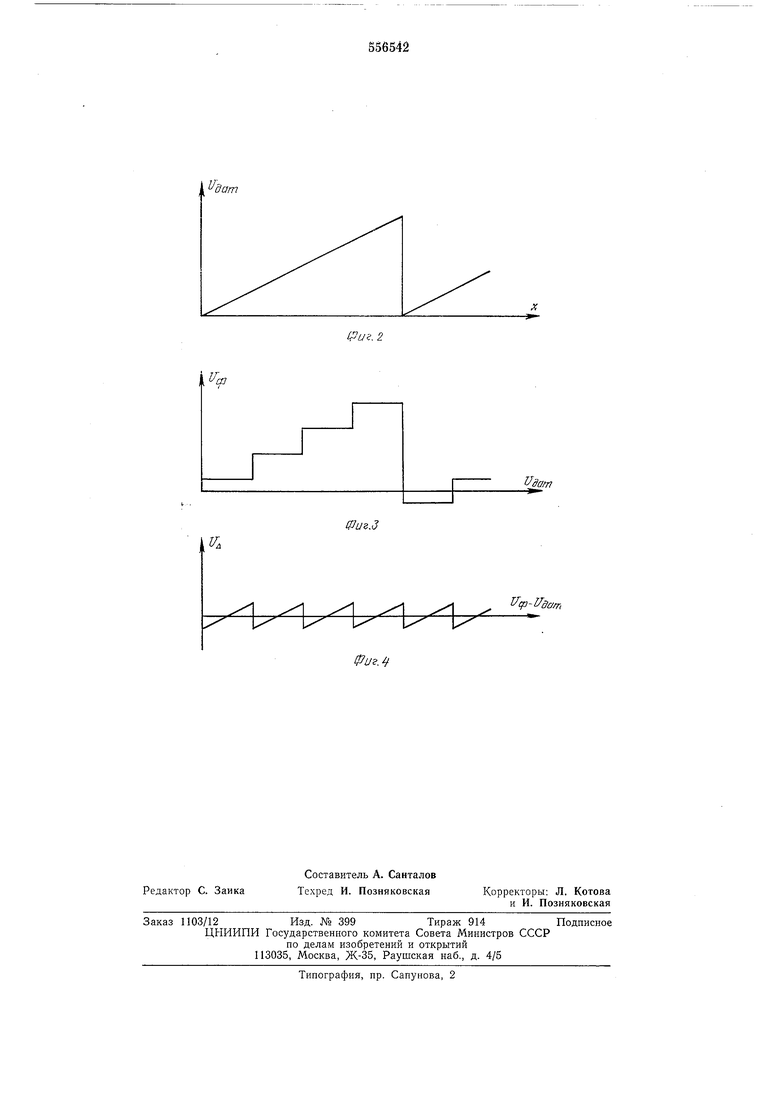
На фиг. 1 показана функциональная схема устройства применительно к двухфазному вентильному электродвигателю; на фиг. 2 приведен график выходного сигнала датчика в функции положения; на фиг. 3 - график выходного сигнала преобразователя линейно изменяющегося сигнала в ступенчатый; на фиг. 4 - график сигнала на выходе сумматора при отсутствии управляющего сигнала.
Устройство (фиг. 1) содержит двухфазный электродвигатель 1, вал которого связан через передаточный механизм 2 с датчиком положения 3. Выход датчика подключен к входам преобразователя 4 линейно изменяющегося сигнала в ступенчатый и сумматора 5 с управляющим входом. К третьему входу сумматора 5 подсоединен выход преобразователя 4. Выход сумматора соединен с входами двух преобразователей 6 и 7 линейного сигнала в синусоидальный, к выходам которых подключены через усилители мощности 8 и 9 фазы
10и И двигателя 1,
Устройство работает следующим образом. Предположим, что в исходном состоянии ротор двигателя 1 неподвижен, в фазах 10 и
11по сигналу датчика /дат через сумматор 5, преобразователи 4, 6, 7 и усилители мощности 8 и 9 установлены такие значения токов, что вектор магнитного поля статора совпадает с магнитной осью ротора двигателя, а сигнал f/ynp, поступающий на управляющий вход сумматора 5, равен нулю. При этом электромагнитный момент двигателя также равен нулю. Если на управляющем входе сумматора 5 появится сигнал f/ynp, то под его действием сигнал на выходе сумматора изменит свое значение. При этом в фазах 10 и И двигателя установятся такие значения токов, что поле статора переместится в пространстве и возникнет движущий электромагнитный момент. Ротор двигателя придет в движение.
Если поддерживать (/упр неизменным, то рассогласование между магнитными осями статора и ротора будет постоянным, и двигатель будет развивать неизменный момент. Подача сигнала /7упр на управляющий вход сумматора 5 эквивалентна по своему действию сдвигу щеток у двигателя с контактным коллектором. Преобразователи 6 и 7 вырабатывают на выходах сигналы, которые при равномерном вращении ротора двигателя близки по форме к синусоиде (например, сигнал от преобразователя 6) и косинусоиде (соответственно сигнал от преобразователя 7). Это эквивалентно резкому увеличению коллекторных пластин у двигателя с контактным коллектором и приводит к значительному уменьщению пульсаций электромагнитного момента вентильного электродвигателя. Периодизация входного сигнала U U - /дат+С/упр производится путем формирования ступенчатого сигнала /ф на выходе преобразователя 4.
Сигнал от датчика L/дат в пределах цикла характеристики изменяется линейно в функции перемещения х ротора двигателя (фиг. 2). При этом нужно учитывать, что в период цикла датчика должно, укладываться целое число
пространственных периодов магнитного поля статора двигателя. Это позволяет согласовать периодичность изменения токов в фазах двигателя и магнитного поля двигателя. Для соблюдения этого условия возможна связь вала
двигателя с датчиком через передаточный механизм 2 (например, редуктор) с соответствующим передаточным числом.
Форма выходного сигнала преобразователя линейного сигнала в ступенчатый Оф в функции /дат представлена на фиг. 3. Если предположить, что /yiip 0, то сигнал /д на выходе сумматора 5 будет иметь вид, показанный на фиг. 4. Графики сигналов на фиг. 2, 3 и 4 изображены для
случая аналоговой формы представления сигналов. Их можно использовать и для представления сигналов в цифровой форме, если приписать цифровым разрядам определенный вес и пренебречь эффектами квантования.
Размах сигнала /л прямо пропорционален пространственному периоду магнитного поля статора, т. е. 2п рад.
При /yiip / 0 пилообразная кривая f/л будет смещаться вверх или вниз относительно оси абсцисс. Это вызовет рассогласование между магнитными осями статора и ротора и возникновение электромагнитного момента, отличного от нуля. Изменяя величину и знак /упр (с помощью внещнего управляющего устройства, не показанного на чертеже), можно изменять величину и знак электромагнитного момента двигателя.
Используемый двигатель может иметь другое число фаз, а также расщепленные фазы.
В этом случае нужно соответственно изменить
число преобразователей линейного сигнала в синусоидальный и число усилителей мощности.
Оиисаннря выше структура позволяет при номощк введенных преобразователей и сумматора получить синусоидальную или близкую к ней форму напряжений на фазах двигателя или токов Б них, обеспечить регулирование угла момента по внешнему сигналу, уменьшить колебания электромагнитного момента двигателя, благодаря чему повышаются энерге ичсские показатели и качество движения. Kj.oMe того, датчик положения, имеюЯ1ИЙ относительно высокую разрешающую способность, используется одновременно для получения сигнала обратной связи нри работе двигателя в системе автоматического регулирования, например следящей системе.
Формула изобретения
Вентильный электродвигатель с датчиком положения ротора, имеющим циклическую ха.рактеристику вход-выход, линейную в пределах цикла, причем в цикл укладывается целое число пространственных периодов магнитного поля статора двигателя, соединенным с усилителями мощности через функциональный нреобразователь, отличающийся тем, что, с целью улучшения качества движения и повышения энергетических показателей, функциональный преобразователь содержит преобразователи линейно изменяющегося сигнала в ступенчатый и в сигналы, близкие к синусоидальным, и трехвходовый сумматор с унравляющим первым входом, вторым входом, соединенным с выходом датчика положения ротора и входом преобразователя линейно изменяющегося сигнала в стуненчатый, подключенного своим выходом к третьему входу сумматора, связанного выходом с входами преобразователей линейно изменяющегося сигнала в сигналы, близкие к синусоидальным, соединенных своими выходами с входами усилителей мощности.
Источники информации, принятые во внимание при экспертизе:
1.Вольдек А. И. Электрические мащины. Л., «Энергия, 1974, с. 235-238.
2.Двигатели постоянного тока с полупроводниковылш коммутаторами. Сборник статей
под ред. Овчинникова И. Е., Л., «Наука, 1972, с. 154-159.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU936340A1 |
| Вентильный электродвигатель | 1975 |
|
SU743128A2 |
| Способ калибровки шагового электродвигателя | 1977 |
|
SU653713A1 |
| Электропривод | 1979 |
|
SU942230A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
cp-lfdam
