(54) ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ КОРОТКОЗАМКНУП.М
ДВИГАТЕЛЕМ
нитного момента определяется приняjUM законом «частотного управления f (постоянство потокосцепления ротора) и влиянием индуктивности рассеяния ротора. При работе во второй зоне регулирования (выше основной скорости) производится ослабление потока и, так как рабочая т0чка в современнь t высокоиспользуемыз машинах лежит за коленом кривой намагничивания, ю параметры двигателя тоже значительно изменяются.
Если -произвести оптимальную настройку регуляторов при работе в линейной зоне, то-привод будет работат с недопустимыми перерегулированиягли по току, мдменту и скорости в зоне насыщения. Если же, напротив, настроить регуляторы по ддсьвденным параметрам двигателя, то .привод будет вяло отрабатывать задание и воз ущения в линейной зоне, быстродействие его существенно ухудшается.
Целью изобретения является обеспечение высокого качества регулирования скорости при учете насыщения магнитнЬй цепи двигателя.
Цель достигается тем, что в предлагаемый электропривод с асинхронным короткозамкнутым двигателем введены два блока управления, два блока нелинейиостей и блок вычисления модуля вектора тока статора, вход которого подключен к блоку вычисления составляющих тока статора, а выход через первый из блоков нелинейностей и первый блок управления - к блоку компенсирующих связей и блоку регулирования фазных токов статора, при этом вход второго из блоков нелинейностей подключен к выходу блока вычисления модуля по:гокосцепления, а выход через второй блок управления - к блоку регулирования потокосцепления. В блок компенсирующих связей, содержащий множительное устройство, подключенное к датчику скорости и блоку обратного преобразования: координат, и сумматор компенсирующих связей по активному току статора, введены последовательно включенные магниторезистор с управляющим входом и операционный усилитель, выход которого подключен к упомянутому сумматору, при этом магниторезистор подключен к выходу упомянутого множительного устройства, а его управляющий вход к первому блоку управления. Блок регулирования потокосцепления выполнен в виде параллельно включенных интегрального и пропорционального регуляторов, при этом во входной цепи и в цепи обратной связи по потокосцеплению интегрального регулятора, а также в цепи обратной связи операционного усилителя пропорционального регулятора включены магниторезисторы, управляющие входы которых подключены :о второму блока управления. В блок
регулирования фазных токов статора, содержащий пропорциональные регуляторы в каждой фазе, введены магниторзисторы, включенные в цепи обратных связей операционных усилителей указаных регуляторов, при этом управляющие входы магниторезисторов подключены к первому блоку управления.
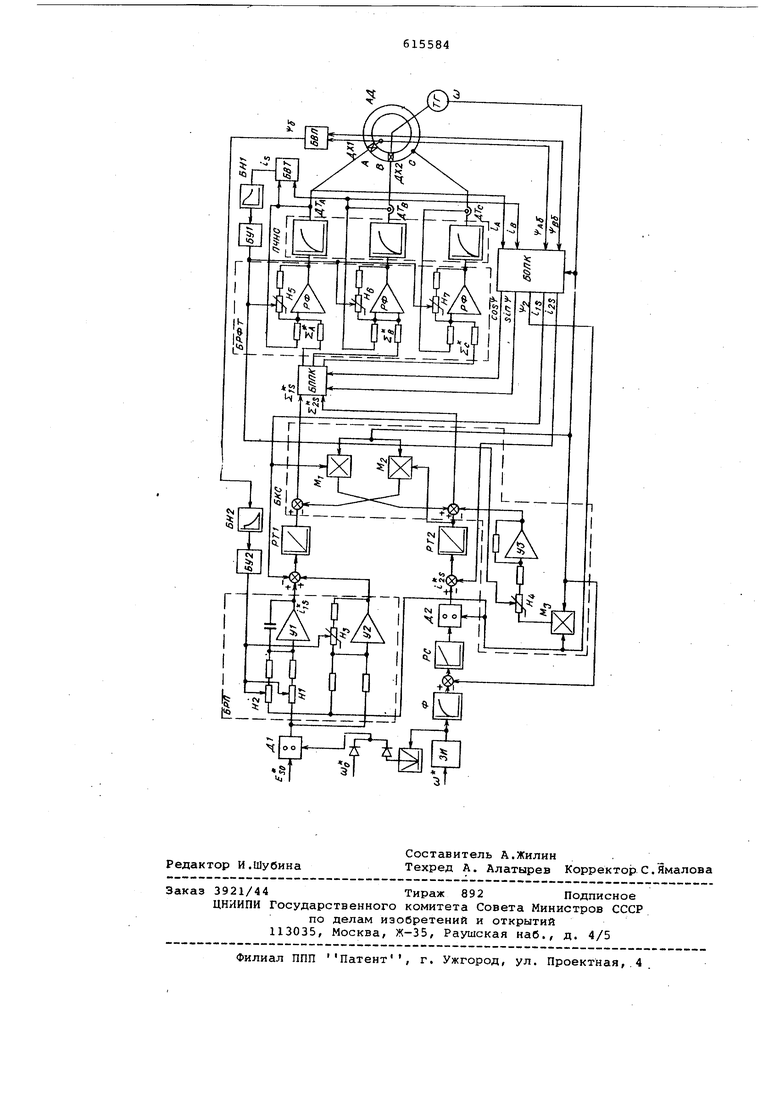
На чертеже представлена функциональная схема предложенного электропривода.
Один из каналов регулирования содержит делительное устройство Д 1, блок регулирования потокосцепления БРП с операционными усилителями J1 и У2 и И - регулятор намагничивающего тока статора РТ 1.
Другой из каналов регулирования содержит задатчик ИНТЕНСИВНОСТИ ЗИ, фильтр Ф, регулятор скорости PC, делительное устройство Д2 и И - регулятор активного тока статора РТ2.
- Регуляторы в каждом канале соединены между собой по принципу подчиненного, регулирования. Кроме того, в устройстве имеется блок компенсирующих связей БКС, включающий множительные устройства Ml, М2, МЗ и дв сумматора, выходы которых подключены ко входам блока прямого преобразования координат БППК. Последний вырабатывает сигналы задания фазных токо статора с , отрабатываемые в блоке регулирования фазных токов статора БРФТ с П-регуляторами фазных токов РФ выходные сигналы которых подаются на входы фазных систем упраления преобразователем частоты с непосредственной связью ПЧНС, питающим статор асинхронного двигателя АД.
В устройстве имеется блок обратного преобразования координат БОПК, вырабатывающий сигналы .действительного потокосцепления ротора н, намагничивающего г,ь и активного токов статора, а также сигналы гармонических функций бгпЧ йозТугла г между обобщенным вектЪром потокосцепления ротора Т,, и магнитной осью фазы А статора. На вход этого блока подаются сигналы датчиков тока ДТ, ДТ, датчиков Холла ДХ1, ДХ2, установленных в воздушном зазоре двигателя, и тахогенератора ТГ.
Помимо указанного в электропривод введены блок управления БУ2, управляющий магнитор.езисторами HI, Н2 и НЗ на входах и в цепи обратной связи операционных усилителей У1 и У2 с помощью блока нелинейности БН1 и блока вычисления ВВП главного потокосцепления j-.
Магниторезисторы Н4, Н5-Н7, установленные соответственно на входе операционного усилителя УЗ и в цепях обратных связей регуляторов РФ, управляются блоком управления БУ1 с помощью блока нелинейности БН1 и блока вычисления модуля вектора тока статора БВТ. Уравнения асинхронного двигателя пригодные как йри работе его на линейном участке кривой намагничивания так и на насыщенном участке имеют вид: .()-«tbji,-lf-r, V;V4 P t) - Uir- Ktftri, 8 Ky. ( + -де T°- S ) Rr p Y L« V индуктивность от основного потока, определяемая по кривой намагничивания путей основного потока двигателя - динамический коэффи циент связи ротора. .В уравнениях (1) обозначено; U - индуктивность, R - активное сопротивление; и - напряжение, t - ток Т- потокосцепление, Т - постоянная времени, Р символ дифференцирования, - электрическая частота вра щения вала, со - частота вращения вектора V Индексы: . S - статор; - ротор; t - рассеяние; 1 - ось вектора Ч 2 - ось активного тока статора. В соответствии с уравнениями 41) видна необходимость самонастройки параметров операционных усилителейрегуляторов асинхронного электропривода. В частности, на чертеже показа на самонастройка операционных усилителей У1, У2,за счет автоматического изменения по единому закону сопротив ления магниторезисторов HI, Н2 и НЗ путем изменения блоком БУ2 величины магнитного поля, в котором они находятся. Блок БУ2 представляет собой тот или иной источник магнитного поля, например, магнитопровод с намотанной на него обмоткой управления и воздушным зазором, в который помещены магниторезисторы. Ввиду малой потребной электромагнитной мощности управления полоса пропускания подоб;ного блока управления может составлять несколько килогерц, что для целей рассматриваемого электропривода вполне достаточно. Параллельное включение на выходе Д1 двух усилителей И и П типа (а не одного усилителя с более сложной пе редаточной функцией) расширяет воз можности исп льзования однотипных магниторезисторов с одинаковыми номиналами сопротивлений, что в связи с ограниченностью нс 1енклатуры магниторезисторов имеет большое практическое значение. Кроме того, это позволяет обойтись при нелинейной коррекции У1 и У2 одним блоком управления. Требуемый закон изменения сопротивлений магниторезисторов Н1-НЗ соответствует изменению L в функции TS- и определяется по кривой намагничивания путей главного потока, вычисляемой на основании известного опыта холостого хода. Эта зависимость с учетом нелинейности магниторезисторов набирается в блоке БН1. В блoke БВП вычисляется главное потокосцепление Т по сигналам датчиков Xonjia %8 г в соответствии с выражениями: Тл Т., Л /п I I ТЧл tefr I J На чертеже показана самонастройка регуляторов РФ фазных токов за счет автоматического изменения по другому единому закону сопротивлений магниторезисторов И 5, Н6 и Н7 путем изменения блоком БУ1 величины магнитного поля, в котором они находятся. Блок БУ1 по своему устройству аналогичен блоку БУ2. Требуемый закон изменения сопротивлений магниторезисторов Н5-Н7 соот|етствует изменению индуктивности U путем рассеяния в функции тока статора ig и определяется по кривой намагничивания путей потоков рассеяния, рассчитываемой по результатам известного опыта короткого замыкания. Эта зависимость с учетом нелинейности магниторезисторов набирается в блоке БН2. В блоке БВТ вычисляется ток статора Is по сигналам датчиков тока i, i в соответствии с выражениями: 4 -/5и 1ГТ .; Нелинейная коррекция регуляторов РФ вызывает необходимость -корректировать выходной сигнал множительного устройства МЗ. Это осуществляется за счет управления с помовц.ю того же блока БУ1 сопротивлением магниторезистора Н4 на входе операционного усилителя УЗ. Нелинейная коррекция остальных регуляторов и перекрестных связей не требуется. Возможно применение в предлагае HQJ электроприводе вместо магниторезисторов обычных нерегулируемых резисторов, шунтируемых транзи|сторныМи ключами, управляемьоми по принципу широтноимпульсной модуляции. При этом блоки БУ1 и БУ2 представ ляют модуляторы, ширины упрар1ляющих импульсов и реализуютте же самые законы управления Работа предлагаемого устройства а наиболее характерном режиме протекает следующим образом. Задающий сигнал Е через делитель ное устройство Д1 подается на вход усилителей У1 и У2, которые вырабатывают уставку для регулятора РТ1. Последней, в свою очередь, формирует уставки регуляторов фазных токов РФ. Переходный-процесс установки заданного значения ч формируется совместньш действием всех,указанных регуляторов. Затем на вход PC от ЗИ через фильтр Ф подается сигнал задания скорости. Одновременно на выходе PC появляется сигнал задания электромагнитного момента/ который после прохождения через делительное устройство Д2 образует сигнал задания активного тока статора - Контуры регулирования скорорти, активного и намагничивающего токов статора совмест но с контурами регулирования фазных токов формируют типовую диаграмму электромагнитного момента, соответствующую предписаниям симметричного оптимума. Врезультате происходит быстрый разгон АД до заданной cKopod ти. Таким образом данный электропривод/ по сравнению с известным устрой ством/ обеспечивает высокое качество регулирования скорости при работе ка на линейных участках кривых намагничивания двигателя/ так и в зоне насыщения. Аналогичные методы и средства мож но применить для нелинейной коррекции машины двойного питания, работаю щей в режиме насыщения. Формула изобретения 1.. Злеилфопривод с асинхронным KQ роткозамкнутым двигателем с каналами регулирования активной и реактивной составляющих полного тока статора, содержащий преобразователь частоты с непосредственной связью/ блок регулирования фазных токов статора/ блоки прямого и обратного преобразования координат/ блок компенсирующих связей, блоки регулирования скорости и потокосцепления/ блок вычисления модуля потокосцепления, подключенный к датчикам Холла/ расположенным в воздушном зазоре двигателя, блок вы числения составляющих тока статора. подключенный к фазным датчикам тока, датчик скорости/ отлич ающи ис я тем, что/ с целью обеспечения высокого качества регулирования скорости при учете насыщения магнитной цепи двигателя, в него введены два блока управления, два блока нелинейности и блок вычисления модуля BeKTqра тока статора/ вход которого подключен к блоку вычисления составляющих тока статора, а выход через первый из блоков нелинейностей и первый блок управления - к блоку компенсирующих связей и блоку регулирования фазных токов статора, при этом вход второго из блоков нелинейностей подключен к выходу блока вычисления модуля потокосцепления, а выход через второй блок управления - к блоку регулирования потокосцепления. 2.Электропривод по п.1, отличающийся тем, что в блок компенсирующих связей, содержащий множительное устройство, подключенное к датчику скорости и блоку обратного преобразования координат, и сумматор компенсирующих связей по активному току статора., введены последователь- но включенные магниторезистор с упра|вляющим входом и операционный усилитель , выход которого подключен к упомянутому сумматору, при этом магниторезистор подключен к выходу упомянутого множительного устройства/ а его управляющий вход - к первому блоку управления. 3.Электропривод по пп. 1 и 2/ отличающийся тем, что блок регулирования потокосцепления выполнен в виде параллельно включен-, ных интегрального и пропорционального регуляторов/ при этом во входной цепи и в цепи обратной связи по потокосцеплению интегрального регулятора, а также в цепи обратной связи операционного усилителя пропорционального регулятора включены магниторезисторы/ управляющие входы которых подключены ко второму блоку управления. 4.Электропривод по п.1-3, отличающийся тем, что в блок регулирования фазных токов статора, содержащий пропорциональные регуляторы в каждой фазе/ введены магнито резисторы, включенные в цепи обратных связей операционных усилителей указанных регуляторов/ при этом управляющие входы магниторезисторов подключены к первому блоку управления. Источники информации, принятые во внимание при экспертизе: 1.Sieme - Eettschrift , 1971. 45/ 10, с. 761-764. 2.Патент ФРГ № 1941312, кл. 21 С 59/36/ 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| Электропривод с машиной переменного тока | 1976 |
|
SU649114A1 |
| Способ управления электроприводом переменного тока и устройство для его осуществления | 1976 |
|
SU656175A1 |
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Устройство для компенсации эдс в синхронном частотно-управляемом электроприводе | 1974 |
|
SU688976A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |